一种送布装置的驱动电路的制作方法
本技术涉及驱动电路,具体是一种送布装置的驱动电路。
背景技术:
1、在激烈的市场竞争、需求增大与客户需求越来越个性化趋势下,服装、制鞋、皮包皮革等企业在生产技术方面不断地面临新的挑战,这些也促使了自动裁床的兴起。
2、自动裁床都需要上料的过程,现在很多自动裁床都仍然是靠人工将面料送上裁床,这样就需要大量的人力去完成,而且人工送布很容易造成送布位置不准确、面料褶皱等等问题。
3、送布装置则解决了这些问题,但是目前一般的驱动电路中存在着含有大量继电器的复杂逻辑电路,使整个电路板体积变得较大,结构也更加复杂。另外,大多数驱动电路都没有设置保护、隔离等措施,这很容易导致电路的损坏进而使整个电路的寿命减短,需要改进。
技术实现思路
1、本实用新型的目的在于提供一种送布装置的驱动电路,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
3、一种送布装置的驱动电路,包括:
4、输入模块,用于将上位机的按键信息、传感器的输入信息通过光耦传输给单片机模块;
5、单片机模块,用于处理接收到的信息,并根据输入的信息来输出不同的电压信号给输出控制模块;
6、电源模块,用于将24v直流电转化为5v直流电,供给单片机模块工作;
7、输出控制模块,用于根据单片机模块输入的电压信号来使连接器模块导通,输入的电压信号为高电平时,连接器模块导通;输入的电压信号为低电平时,连接器模块截止;
8、连接器模块,用于导通时,控制裁床工作;
9、电源模块连接单片机模块,输入模块连接单片机模块,单片机模块连接输出控制模块,连接器模块连接输出控制模块。
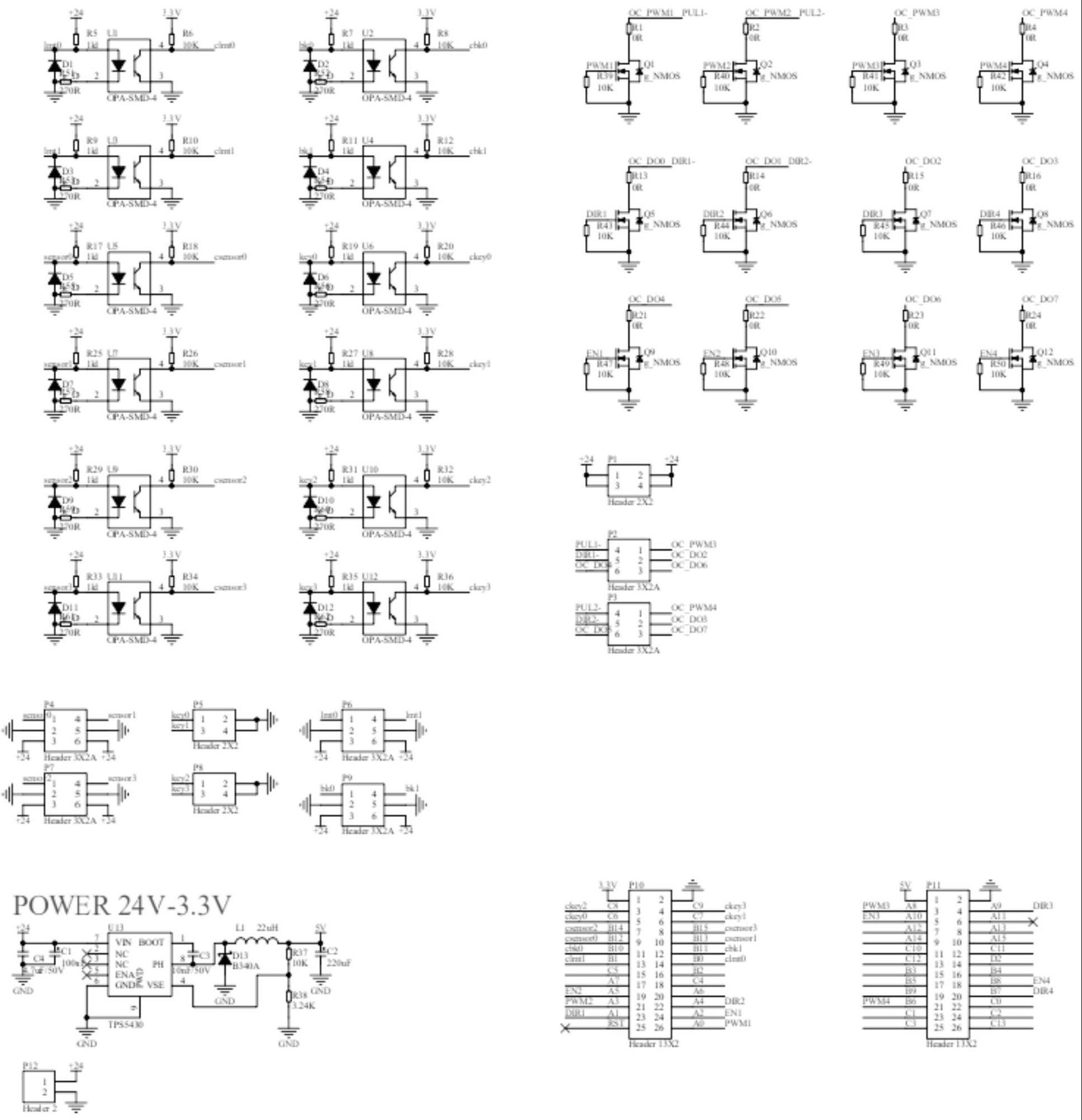
10、作为本实用新型再进一步的方案:单片机模块包括单片机p10、单片机p11,5v电压连接单片机p11的1号引脚,3.3v电压连接单片机p10的1号引脚,单片机p10的2号引脚接地,单片机p11的2号引脚接地。
11、作为本实用新型再进一步的方案:输入模块包括光耦u1、光耦u2、光耦u3、光耦u4、光耦u5、光耦u6、光耦u7、光耦u8、光耦u9、光耦u10、光耦u11、光耦u12,光耦u1的4号引脚连接单片机p10的14号引脚,光耦u2的4号引脚连接单片机p10的11号引脚,光耦u3的4号引脚连接单片机p10的13号引脚,光耦u4的4号引脚连接单片机p10的12号引脚,光耦u1的5号引脚连接单片机p10的9号引脚,光耦u1的6号引脚连接单片机p10的5号引脚,光耦u1的7号引脚连接单片机p10的10号引脚,光耦u1的8号引脚连接单片机p10的6号引脚,光耦u1的9号引脚连接单片机p10的7号引脚,光耦u1的10号引脚连接单片机p10的3号引脚,光耦u1的11号引脚连接单片机p10的8号引脚,光耦u1的12号引脚连接单片机p10的4号引脚。
12、作为本实用新型再进一步的方案:电源模块包括稳压器u13、电容c4、电容c1、电容c3、二极管d13、电感l1、电阻r37、电阻r38、电容c2,24v电压连接电容c4、电容c1、稳压器u13的7号引脚,电容c4的另一端接地,电容c1的另一端接地,稳压器u13的1号引脚连接电容c3、电容c3的另一端连接稳压器u13的8号引脚、电感l1、二极管d13的负极,二极管d13的正极接地,电感l1的另一端连接电阻r37、电容c2,电阻r37的另一端连接电阻r38、稳压器u13的4号引脚,电阻r38的另一端接地,电容c2的另一端接地。
13、作为本实用新型再进一步的方案:输出控制模块包括mos管q1、mos管q2、mos管q3、mos管q4、mos管q5、mos管q6、mos管q7、mos管q8、mos管q9、mos管q10、mos管q11、mos管q12,mos管q1的g极连接单片机p10的26号引脚,mos管q2的g极连接单片机p10的21号引脚,mos管q3的g极连接单片机p11的3号引脚,mos管q4的g极连接单片机p11的21号引脚,mos管q5的g极连接单片机p10的23号引脚,mos管q6的g极连接单片机p10的24号引脚,mos管q7的g极连接单片机p11的4号引脚,mos管q8的g极连接单片机p11的20号引脚,mos管q9的g极连接单片机p10的24号引脚,mos管q10的g极连接单片机p10的19号引脚,mos管q11的g极连接单片机p11的5号引脚,mos管q12的g极连接单片机p11的18号引脚。
14、作为本实用新型再进一步的方案:连接器模块包括连接器p1、连接器p2、连接器p3、连接器p4、连接器p5、连接器p6、连接器p7、连接器p8、连接器p9、连接器p10、连接器p11、连接器p12,连接器p2的1号引脚通过电阻r3连接mos管q3的d极,连接器p2的2号引脚通过电阻r15连接mos管q7的d极,连接器p2的3号引脚通过电阻r23连接mos管q11的d极,连接器p2的4号引脚通过电阻r1连接mos管q1的d极,连接器p2的5号引脚通过电阻r13连接mos管q5的d极,连接器p2的6号引脚通过电阻r21连接mos管q9的d极,连接器p3的1号引脚通过电阻r4连接mos管q4的d极,连接器p3的2号引脚通过电阻r16连接mos管q8的d极,连接器p3的3号引脚通过电阻r24连接mos管q12的d极,连接器p3的4号引脚通过电阻r2连接mos管q2的d极,连接器p3的5号引脚通过电阻r14连接mos管q6的d极,连接器p3的6号引脚通过电阻r22连接mos管q10的d极,连接器p4的1号引脚连接光耦u5的1号引脚,连接器p4的4号引脚连接光耦u7的1号引脚,连接器p5的1号引脚连接光耦u6的1号引脚,连接器p5的3号引脚连接光耦u8的1号引脚,连接器p6的1号引脚连接光耦u1的1号引脚,连接器p6的4号引脚连接光耦u3的1号引脚,连接器p7的1号引脚连接光耦u9的1号引脚,连接器p7的4号引脚连接光耦u11的1号引脚,连接器p8的1号引脚连接光耦u10的1号引脚,连接器p8的3号引脚连接光耦u12的1号引脚,连接器p9的1号引脚连接光耦u2的1号引脚,连接器p9的4号引脚连接光耦u4的1号引脚。
15、与现有技术相比,本实用新型的有益效果是:本方案相较其他驱动电路无需使用继电器,成本大大降低;使用光耦起到输出模块电路与单片机模块电路隔离的保护效果;瞬态抑制二极管具有高压防护效果;电路接线简单;驱动电路可广泛运用于工业机械的驱动领域,具有较大的现实意义。
技术特征:
1.一种送布装置的驱动电路,其特征在于:
2.根据权利要求1所述的送布装置的驱动电路,其特征在于,单片机模块包括单片机p10、单片机p11,5v电压连接单片机p11的1号引脚,3.3v电压连接单片机p10的1号引脚,单片机p10的2号引脚接地,单片机p11的2号引脚接地。
3.根据权利要求2所述的送布装置的驱动电路,其特征在于,输入模块包括光耦u1、光耦u2、光耦u3、光耦u4、光耦u5、光耦u6、光耦u7、光耦u8、光耦u9、光耦u10、光耦u11、光耦u12,光耦u1的4号引脚连接单片机p10的14号引脚,光耦u2的4号引脚连接单片机p10的11号引脚,光耦u3的4号引脚连接单片机p10的13号引脚,光耦u4的4号引脚连接单片机p10的12号引脚,光耦u1的5号引脚连接单片机p10的9号引脚,光耦u1的6号引脚连接单片机p10的5号引脚,光耦u1的7号引脚连接单片机p10的10号引脚,光耦u1的8号引脚连接单片机p10的6号引脚,光耦u1的9号引脚连接单片机p10的7号引脚,光耦u1的10号引脚连接单片机p10的3号引脚,光耦u1的11号引脚连接单片机p10的8号引脚,光耦u1的12号引脚连接单片机p10的4号引脚。
4.根据权利要求1所述的送布装置的驱动电路,其特征在于,电源模块包括稳压器u13、电容c4、电容c1、电容c3、二极管d13、电感l1、电阻r37、电阻r38、电容c2,24v电压连接电容c4、电容c1、稳压器u13的7号引脚,电容c4的另一端接地,电容c1的另一端接地,稳压器u13的1号引脚连接电容c3、电容c3的另一端连接稳压器u13的8号引脚、电感l1、二极管d13的负极,二极管d13的正极接地,电感l1的另一端连接电阻r37、电容c2,电阻r37的另一端连接电阻r38、稳压器u13的4号引脚,电阻r38的另一端接地,电容c2的另一端接地。
5.根据权利要求2所述的送布装置的驱动电路,其特征在于,输出控制模块包括mos管q1、mos管q2、mos管q3、mos管q4、mos管q5、mos管q6、mos管q7、mos管q8、mos管q9、mos管q10、mos管q11、mos管q12,mos管q1的g极连接单片机p10的26号引脚,mos管q2的g极连接单片机p10的21号引脚,mos管q3的g极连接单片机p11的3号引脚,mos管q4的g极连接单片机p11的21号引脚,mos管q5的g极连接单片机p10的23号引脚,mos管q6的g极连接单片机p10的24号引脚,mos管q7的g极连接单片机p11的4号引脚,mos管q8的g极连接单片机p11的20号引脚,mos管q9的g极连接单片机p10的24号引脚,mos管q10的g极连接单片机p10的19号引脚,mos管q11的g极连接单片机p11的5号引脚,mos管q12的g极连接单片机p11的18号引脚。
6.根据权利要求5所述的送布装置的驱动电路,其特征在于,连接器模块包括连接器p1、连接器p2、连接器p3、连接器p4、连接器p5、连接器p6、连接器p7、连接器p8、连接器p9、连接器p10、连接器p11、连接器p12,连接器p2的1号引脚通过电阻r3连接mos管q3的d极,连接器p2的2号引脚通过电阻r15连接mos管q7的d极,连接器p2的3号引脚通过电阻r23连接mos管q11的d极,连接器p2的4号引脚通过电阻r1连接mos管q1的d极,连接器p2的5号引脚通过电阻r13连接mos管q5的d极,连接器p2的6号引脚通过电阻r21连接mos管q9的d极,连接器p3的1号引脚通过电阻r4连接mos管q4的d极,连接器p3的2号引脚通过电阻r16连接mos管q8的d极,连接器p3的3号引脚通过电阻r24连接mos管q12的d极,连接器p3的4号引脚通过电阻r2连接mos管q2的d极,连接器p3的5号引脚通过电阻r14连接mos管q6的d极,连接器p3的6号引脚通过电阻r22连接mos管q10的d极,连接器p4的1号引脚连接光耦u5的1号引脚,连接器p4的4号引脚连接光耦u7的1号引脚,连接器p5的1号引脚连接光耦u6的1号引脚,连接器p5的3号引脚连接光耦u8的1号引脚,连接器p6的1号引脚连接光耦u1的1号引脚,连接器p6的4号引脚连接光耦u3的1号引脚,连接器p7的1号引脚连接光耦u9的1号引脚,连接器p7的4号引脚连接光耦u11的1号引脚,连接器p8的1号引脚连接光耦u10的1号引脚,连接器p8的3号引脚连接光耦u12的1号引脚,连接器p9的1号引脚连接光耦u2的1号引脚,连接器p9的4号引脚连接光耦u4的1号引脚。
技术总结
本技术公开了一种送布装置的驱动电路,涉及驱动电路,该送布装置的驱动电路,包括:输入模块,用于将上位机的按键信息、传感器的输入信息通过光耦传输给单片机模块;单片机模块,用于处理接收到的信息,并根据输入的信息来输出不同的电压信号给输出控制模块;电源模块,用于将24V直流电转化为5V直流电,供给单片机模块工作;与现有技术相比,本技术的有益效果是:本方案相较其他驱动电路无需使用继电器,成本大大降低;使用光耦起到输出模块电路与单片机模块电路隔离的保护效果;瞬态抑制二极管具有高压防护效果;电路接线简单;驱动电路可广泛运用于工业机械的驱动领域,具有较大的现实意义。
技术研发人员:袁博
受保护的技术使用者:上海派机姆机械设备有限公司
技术研发日:20210903
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!