卡塞抓取机构及系统的制作方法
1.本实用新型涉及半导体设备领域,具体涉及一种卡塞抓取机构及系统。
背景技术:
2.如图1所示的卡塞10,包括壳体以及壳体内设置的内卡槽阵列,主要用于层叠式放置半导体行业或者液晶显示面板行业中的片状结构产品。该卡塞10针对片状结构产品的收纳效果好,也便于后续快速取出片状结构产品。
3.常规移动卡塞装置主要依靠人工,效率低,不利于实现生产线上的自动化作业。
技术实现要素:
4.基于此,有必要提供一种卡塞抓取机构系统,能够有效抓取卡塞,利于实现自动化作业。
5.本实用新型的技术方案如下:
6.本实用新型提供一种卡塞抓取机构,卡塞的两个相对外侧壁上均具有十字形凸起,所述卡塞抓取机构包括支撑框架和电动夹爪,所述电动夹爪设于所述支撑框架上,所述电动夹爪至少具有两个相对设置的抓手,所述两个相对设置的抓手上均设有十字形凹槽,用于与卡塞的两个十字形凸起卡位配合。
7.在其中一些优选的实施例中,所述的卡塞抓取机构还包抓取检测装置,所述抓取检测装置设于所述电动夹爪上或者所述支撑框架上,利用传感器监测所述电动夹爪是否抓取到卡塞及其所在位置。
8.在其中一些优选的实施例中,所述的卡塞抓取机构还包括用于对卡塞及其所在工位环境拍照定位的视觉定位组件。
9.优选地,所述视觉定位组件包括摄像头和安装架,所述摄像头电性连接所述抓取检测装置,所述摄像头通过所述安装架设于所述支撑框架上,用于拍摄卡塞及其所在工位环境。进一步地,所述视觉定位组件还包括保护罩,所述保护罩设于所述安装架上并侧向包围所述摄像头。
10.优选地,所述视觉定位组件还包括用于辅助拍照定位的光源。
11.在其中一些实施例中,所述抓手整体上呈弯折结构。
12.本实用新型提供一种卡塞抓取系统,包括控制器、机械臂和上述所述卡塞抓取机构,所述机械臂连接所述支撑框架,所述控制器分别连接所述机械臂、所述电动夹爪和所述摄像头。
13.在其中一些实施例中,所述卡塞抓取系统还包括工作台和托架,所述托架设于所述工作台上形成工位环境,用于倾斜放置卡塞并暴露其十字形凸起。
14.与现有技术相比,本技术卡塞抓取机构通过设计与卡塞十字形凸起相匹配含十字形凹槽的抓手,从而可以实现依靠电动夹爪抓取工位上卡塞,再进一步通过利用抓取检测装置和视觉定位组件反馈控制实现抓取过程的安全性、稳固性和可靠性,便于促进半导体
行业或者液晶显示面板行业等在装配片状产品中的自动化作业。
附图说明
15.图1为卡塞的结构示意图。
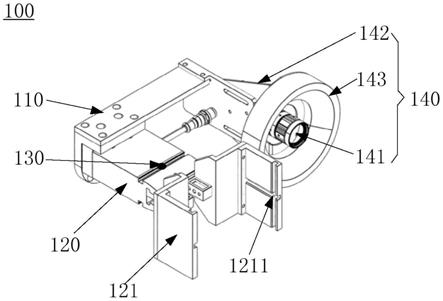
16.图2为一实施方式的卡塞抓取机构的一视角结构示意图。
17.图3为图2中的卡塞抓取机构的另一视角结构示意图。
18.图4为一实施方式的卡塞抓取系统的一视角结构示意图。
具体实施方式
19.为了便于理解本技术,下面将参照相关附图对本技术进行更全面的描述。附图中给出了本技术的实施例。但是,本技术可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使本技术的公开内容更加透彻全面。
20.除非另有定义,本文所使用的所有的技术和科学术语与属于本技术的技术领域的技术人员通常理解的含义相同。本文中在本技术的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本技术。
21.可以理解,空间关系术语例如“在...下”、“在...下面”、“下面的”、“在...之下”、“在...之上”、“上面的”等,在这里可以用于描述图中所示的一个元件或特征与其它元件或特征的关系。应当明白,除了图中所示的取向以外,空间关系术语还包括使用和操作中的器件的不同取向。例如,如果附图中的器件翻转,描述为“在其它元件下面”或“在其之下”或“在其下”元件或特征将取向为在其它元件或特征“上”。因此,示例性术语“在...下面”和“在...下”可包括上和下两个取向。此外,器件也可以包括另外地取向(譬如,旋转90℃或其它取向),并且在此使用的空间描述语相应地被解释。
22.需要说明的是,当一个元件被认为是“连接”另一个元件时,它可以是直接连接到另一个元件,或者通过居中元件连接另一个元件。以下实施例中的“连接”,如果被连接的电路、模块、单元等相互之间具有电信号或数据的传递,则应理解为“电连接”、“通信连接”等。
23.在此使用时,单数形式的“一”、“一个”和“所述/该”也可以包括复数形式,除非上下文清楚指出另外的方式。还应当理解的是,术语“包括/包含”或“具有”等指定所陈述的特征、整体、步骤、操作、组件、部分或它们的组合的存在,但是不排除存在或添加一个或更多个其他特征、整体、步骤、操作、组件、部分或它们的组合的可能性。
24.如图1所示,发明人团队通过探索发现待抓取物料的关键特征为:卡塞10的两个相对外侧壁上均具有十字形凸起11,利用中部的十字形凸起11进行卡位能够保证更稳固地抓取作业过程。
25.如图2和图3所示,一实施方式的卡塞抓取机构100,包括支撑框架110、电动夹爪120、抓取检测装置130和视觉定位组件140。
26.在本实施方式中,支撑框架110包括多个支撑板装配形成的类l型弯折框架结构,每个支撑板上均设有便于连接结构元件的安装孔。
27.在本实施方式中,电动夹爪120具有两个抓手121,两个抓手121的内表面分别设有与卡塞10的十字形凸起11卡位匹配的十字形凹槽1211,保证抓取过程的稳固性。电动夹爪120设于支撑框架110上,两者优选通过螺栓连接,便于装配和维修。
28.优选地,抓手121整体上呈弯折结构,不仅能够利用十字形凹槽1211紧固卡住卡塞10的两侧壁,同时弯折区段还能够阻挡位于卡塞10内的片状产品的掉落。
29.在本实施方式中,抓取检测装置130与电动夹爪120电性连接,抓取检测装置130至少包括两个检测传感器,至少两个检测传感器分别设于电动夹爪的非抓取区域的上下两侧,通过抓取及所夹持位置检测,用于向控制器反馈控制夹紧和松开的进程。抓取检测装置中的传感器优选设于电动夹爪120的非夹持区域,利用传感器监测电动夹爪120的抓手是否抓取到卡塞及其所在位置。在其它实施方式中,传感器的数量及位置可以根据卡塞结构变化及变换工位的环境变化进行调整。
30.在本实施方式,视觉定位组件140用于对卡塞10及其所在工位环境拍照定位。视觉定位组件140包括摄像头141和安装架142,摄像头141电性连接抓取检测装置130,摄像头141通过安装架142设于支撑框架110上,用于拍摄卡塞10及其所在工位环境。优选地,本实施方式中的视觉定位组件140还包括用于辅助拍照定位的光源。进一步地,视觉定位组件140还包括保护罩143,保护罩143设于安装架142上并侧向包围摄像头141。
31.如图4所示,本实用新型还提供一种卡塞抓取系统,包括控制器(未标号显示)、机械臂200和卡塞抓取机构100,机械臂200通过螺栓连接支撑框架100。控制器为plc程序控制器,分别电性连接机械臂200、电动夹爪120和摄像头141。
32.在本实施方式中,卡塞抓取系统还包括工作台和托架300,托架300设于工作台上形成工位环境,用于倾斜放置卡塞10并暴露其十字形凸起11。
33.采用本实施方式的卡塞抓取系统的自动化抓取作业方法,包括如下步骤:
34.(1)利用摄像头141(工业相机)拍照获取到卡塞10的不同放置位置偏移量,然后将偏移量传给控制器或者机械臂200,以便于引导机械臂200运动至正确的预抓取位置。
35.(2)卡塞抓取机构100以垂直于卡塞10上表面的方向向前移动,直至两个抓手121(左指和右指)分别平行于卡塞10的左右侧表面,并能使左指/右指的内十字形凹槽1211在运动过程中能时刻对准卡塞10的十字形凸起11,同时保证左指、右指侧面与卡塞10左侧面、右侧面之间的距离尽量相等,这时卡塞抓取机构的位置为抓取位置。卡塞抓取机构100再沿平行于卡塞10上下表面方向运动,开始夹紧卡塞10,夹紧过程中,左指、右指的十字形凹槽1211起到抓取定位作用,最终卡塞抓取机构完全将卡塞10夹紧,卡塞10的左右两个侧面均进入左指、右指内。
36.与现有技术相比,本实施方式的卡塞抓取机构及其系统通过设计与卡塞十字形凸起11相匹配含十字形凹槽1211的抓手121,从而可以实现依靠电动夹爪120抓取工位上卡塞10,再进一步通过利用抓取检测装置130和视觉定位组件140反馈控制实现抓取过程的安全性、稳固性和可靠性,便于促进半导体行业或者液晶显示面板行业等在装配片状产品中的自动化作业。
37.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1