一种真空吸具的制作方法
1.本实用新型涉及抓取装置领域,尤其涉及一种真空吸具。
背景技术:
2.玻璃、木板等板材,在工厂生产,到厂家销售,再到用户使用,免不了对其搬运,过去均是采用人工搬运,造成了对人力的大量浪费,随着科学技术的不断发展,慢慢的采取机器人进行搬运、抓取,在现有技术中采用采用真空机械臂搬运板材时,当整块提起最上层板材的时候,会带起第二层板材,对第二层板材造成了移位,当吸取第二层板材时,会造成抓取位置不准或产品损坏,影响下一步的作业。
技术实现要素:
3.鉴于背景技术存在的不足,本实用新型涉及一种真空吸具,设置双层结构,加设了气缸,在真空吸盘对板材抓取时,靠近气缸一侧的板材,受气缸带动先脱离下层的板材,再抬起整个机械臂完成抓取动作,解决了第二层板材的移位造成抓取位置不准,影响下一步作业和发生产品损坏的问题。
4.本实用新型涉及一种真空吸具,包括框架梁、安装座、抓取装置与动力装置,所述框架梁分为顶层框架梁与底层框架梁,所述顶层框架梁与安装座固定连接,所述抓取装置安装与底层框架梁,所述顶层框架梁一端铰接于底层框架梁一侧端部,所述动力装置固定于框架梁铰接连接的对侧。
5.通过采用上述方案,设置双层结构,对首层板材进行分步抓取,解决了板材的位移与损坏问题。
6.进一步的,所述动力装置包括气缸、伸缩杆与连接件,所述气缸与顶层框架梁固定连接,所述连接件与底层框架梁固定连接,所述伸缩杆一端与气缸连接,另一端与连接件连接。
7.通过采用上述方案,通过气缸对底层框架梁的进行拉起与放下的动作。
8.进一步的,所述底层框架梁均匀设有多对抓取装置。
9.通过采用上述方案,便于对板材的抓取,同时保证了板材的受力均匀。
10.进一步的,所述顶层框架梁包括相互垂直连接的上横梁与上纵梁,所述底层框架梁包括相互垂直连接的下横梁与下纵梁,所述安装座固定于上横梁中部,所述下纵梁包括长纵梁与短纵梁,所述短纵梁一侧的上纵梁与短纵梁铰接连接,所述长纵梁一侧的上纵梁固定连接有气缸,所述动力装置在上纵梁两侧设有两套。
11.通过采用上述方案,实现对底层框架梁一侧的优先抬起,解决了抓取顶层板材时,次层会被带起来的现象。
12.进一步的,所述顶层框架梁与底层框架梁的铰接连接为通过设置的铰链进行铰接连接。
13.通过采用上述方案,底层框架梁的活动更加灵活。
14.进一步的,所述抓取装置为真空吸盘,所述安装座沿上横梁方向设有电磁阀与真空发生器。
15.通过采用上述方案,与真空吸盘配套对板材进行稳定的真空抓取。
16.进一步的,所述上横梁与下横梁在靠近气缸一侧设有限位片。
17.通过采用上述方案,在底层框架梁位移时保证整体的结构稳定性。
18.进一步的,所述安装座中心设有法兰盘。
19.通过采用上述方案,便于与机械臂或机器人的连接,并且保证连接的强度。
20.进一步的,所述下纵梁的长度大于上纵梁。
21.通过采用上述方案,为真空吸盘的均匀布置,提供了足够的空间。
附图说明
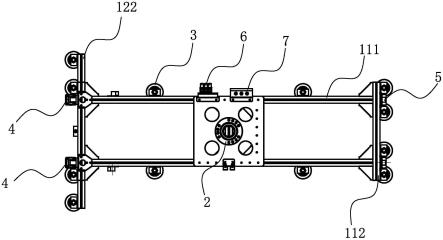
22.图1是本实用新型实施例1俯视结构示意图;
23.图2是本实用新型实施例1正视结构示意图;
24.图3是本实用新型实施例1右视结构示意图。
25.附图标记:11、顶层框架梁;111、上横梁;112、上纵梁;12、底层框架梁;121、下横梁;122、长纵梁;123、短纵梁;2、安装座; 21、法兰盘;3、真空吸盘;4、动力装置;41、气缸;42、伸缩杆; 43、连接件;5、铰链;6、电磁阀;7、真空发生器;8、限位片;81、滑槽。
具体实施方式
26.以下将结合本实用新型的附图,对本实用新型实施例中的技术方案进行清楚、完整的描述和讨论,显然,这里所描述的仅仅是本实用新型的一部分实例,并不是全部的实例,基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本实用新型的保护范围。
27.为了便于对本实用新型实施例的理解,下面将结合附图以具体实施例为例作进一步的解释说明,且各个实施例不构成对本实用新型实施例的限定。
28.本实用新型的实施例1参照图1、图2、图3所示,涉及一种真空吸具,包括框架梁、安装座2、抓取装置与动力装置4,所述框架梁分为顶层框架梁11与底层框架梁12,所述顶层框架梁11包括相互垂直连接的上横梁111与上纵梁112,所述底层框架梁12包括相互垂直连接的下横梁121与下纵梁,所述下纵梁包括长纵梁122与短纵梁 123,所述安装座2固定于两根上横梁111之间,所述抓取装置为真空吸盘3,所述真空吸盘3在底层框架梁12均匀设置有多对,保证抓取板材时受力均匀,所述短纵梁123一侧的上纵梁112与短纵梁 123通过设置的铰链5进行铰接连接,所述动力装置4包括气缸41、伸缩杆42与连接件43,所述气缸41与长纵梁122一侧的上纵梁112 固定连接,所述连接件43与长纵梁122固定连接,所述伸缩杆42一端与气缸41连接,另一端与连接件43连接。
29.所述上横梁111与下横梁121在靠近动力装置4方向设有限位片 8,所述限位片8包括滑槽81,所述限位片8上部与上横梁111固定连接,所述滑槽81与下横梁121固定连接,所述限位片8可以沿滑槽81滑动,所述限位片8可以在框架梁位移时保证结构的稳定性,在所述底层框架梁12抬起时,所述限位片8下部沿滑槽81滑动。
30.所述动力装置4在长纵梁122一侧设有两套,所述安装座2中心设有法兰盘21,所述
法兰盘21与机械臂或者机器人连接时更加稳固。
31.所述上横梁111一侧设有电磁阀6与真空发生器7,所述电磁阀 6、真空发生器7均与真空吸盘3连接。
32.本实用新型为末端抓取系统,配合机械臂或者机器人使用。
33.本实用新型的工作原理:
34.当需要抓取板材时,外部机械臂或机器人控制真空吸盘3与板材贴合,所述真空发生器7工作至真空吸盘3抓牢板材,所述气缸41 带动底层框架梁12绕铰链5顺时针旋转,所述限位片8沿滑槽81滑动,将板材一侧抬起,再将整块板材抬起,完成整个抓取动作,避免了带起第二层板材的问题。
35.最后应说明的是:以上所述实施例,仅为本实用新型的具体实施方式,用以说明本实用新型技术方案,而非对其限制,本实用新型的保护范围并不局限于此,尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,其依然可以对前述实施例所记载的技术方案进行修改或可轻易想到变化,或者对其中部分技术特征进行等同替换;而这些修改、变化或者替换,并不使相应技术方案的本质脱离本实用新型实施例技术方案的精神和范围,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应所述以权利要求的保护范围为准。
技术特征:
1.一种真空吸具,其特征在于:包括框架梁、安装座、抓取装置与动力装置,所述框架梁分为顶层框架梁与底层框架梁,所述顶层框架梁与安装座固定连接,所述抓取装置安装与底层框架梁,所述顶层框架梁一端铰接于底层框架梁一侧端部,所述动力装置固定于框架梁铰接连接的对侧。2.根据权利要求1所述的一种真空吸具,其特征在于:所述动力装置包括气缸、伸缩杆与连接件,所述气缸与顶层框架梁固定连接,所述连接件与底层框架梁固定连接,所述伸缩杆一端与气缸连接,另一端与连接件连接。3.根据权利要求2所述的一种真空吸具,其特征在于:所述底层框架梁均匀设有多对抓取装置。4.根据权利要求3所述的一种真空吸具,其特征在于:所述顶层框架梁包括相互垂直连接的上横梁与上纵梁,所述底层框架梁包括相互垂直连接的下横梁与下纵梁,所述安装座固定于上横梁中部,所述下纵梁包括长纵梁与短纵梁,所述短纵梁一侧的上纵梁与短纵梁铰接连接,所述长纵梁一侧的上纵梁固定连接有气缸,所述动力装置在上纵梁两侧设有两套。5.根据权利要求4所述的一种真空吸具,其特征在于:所述顶层框架梁与底层框架梁的铰接连接为通过设置的铰链进行铰接连接。6.根据权利要求5所述的一种真空吸具,其特征在于:所述抓取装置为真空吸盘,所述安装座沿上横梁方向设有电磁阀与真空发生器。7.根据权利要求5所述的一种真空吸具,其特征在于:所述上横梁与下横梁在靠近气缸一侧设有限位片。8.根据权利要求6所述的一种真空吸具,其特征在于:所述安装座中心设有法兰盘。9.根据权利要求7所述的一种真空吸具,其特征在于:所述下纵梁的长度大于上纵梁。
技术总结
一种真空吸具,包括框架梁、安装座、抓取装置与动力装置,所述框架梁分为顶层框架梁与底层框架梁,所述顶层框架梁与安装座固定连接,所述抓取装置安装与底层框架梁,所述顶层框架梁一端铰接于底层框架梁一侧端部,所述动力装置固定于框架梁铰接连接的对侧,所述一种真空吸具设置双层结构,加设了气缸,在真空吸盘对板材抓取时,靠近气缸一侧的板材,受气缸带动先脱离下层的板材,再抬起整个机械臂完成抓取动作,解决了第二层板材的移位造成抓取位置不准,影响下一步作业和发生产品损坏的问题。影响下一步作业和发生产品损坏的问题。影响下一步作业和发生产品损坏的问题。
技术研发人员:秦良杰 汪萧
受保护的技术使用者:杭州新益稳智能科技有限公司
技术研发日:2021.11.30
技术公布日:2022/8/16
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1