一种高精度坐标机械手搬运机构的制作方法
1.本实用新型应用于机械手高精度搬运技术领域,特别涉及一种高精度坐标机械手搬运机构。
背景技术:
2.自动化生产是在减少人力工作的情况下完成物品加工、搬运或者分拣等工作过程,按照实际生产要求,大部分产品都需要进行搬运和加工的过程,为了实现自动化的生产应用,大部分企业都会选择自动化的机械设备进行简单重复的工作,例如通过高精度机械手进行搬运或者分拣的工作。
3.高精度的机械手在工业生产应用中已经十分广泛,但是目前的很多机械手设备为了满足足够的运载能力,都会适当的加装一定的助力设备,例如气阀装置、液压装置和电机驱动装置等等,以气阀装置为例,一般的机械手装置通过加装的气阀设备来提高运载能力,会造成气阀管线分布散乱、不易排列和管线占用空间大等问题,不仅影响美观,还会影响工作效率,在工作过程中还可能容易造成设备损伤。
技术实现要素:
4.本实用新型的技术任务是针对以上不足,提供一种高精度坐标机械手搬运机构,来解决机械手搬运结构不紧凑、外形不美观的问题。
5.本实用新型解决上述技术问题所采用的技术方案为:本实用新型包括三轴移动机构、设置在所述三轴移动机构活动端的载板模组、设置在载板模组上的视觉模组以及连接所述载板模组旋转端的吸料模组,在所述载板模组上中部和底部分别设置有电磁阀、中空旋转平台,所述电磁阀的阀口与所述中空旋转平台的中空轴相对,所述吸料模组包括吸料块、两个固定块、两个导气阀和若干吸嘴,所述吸料块设置在所述中空轴的旋转端,两个所述固定块设置在所述吸料块上且位于所述中空轴的正下方,两个所述导气阀设置在所述吸料块上且与两个所述固定块相适配,若干所述吸嘴分布在所述吸料块底部。
6.由上述方案可见,所述中空轴和所述电磁阀的阀口相对,且所述固定块设置与所述中空轴的正下方,所述吸料模组的管线经过所述固定块的固定再通过所述中空轴连接到所述电磁阀和其他外接设备,从而使本实用新型结构紧凑、外观优美,所述吸料模组的吸料块在工作时进行转动,所述吸料模组的管线也不会因转动而散乱或者发生纠缠,提高了本实用新型的实用性。
7.一个优选方案是,所述视觉模组包括设置在所述载板模组上的固定架、设置在固定架上的工业相机以及设置在所述固定架上且位于所述工业相机正下方的光源。
8.由上述方案可见,所述工业相机能提供精确的位置信息,有利于吸取物料,所述光源可以提高环境亮度辅助所述工业相机捕捉位置信息。
9.一个优选方案是,所述载板模组上设置有位置传感器,所述中空轴的旋转端设置有与所述位置传感器相适配的挡片。
10.由上述方案可见,所述位置传感器和所述挡片的相互配合,能反馈所述中空轴精确的转动位置数据,从而调整所述吸料模组的位置进行精准地物料吸取。
11.一个优选方案是,所述载板模组上设置有限位块,所述中空轴的旋转端设置有与所述限位块相适配的限位销。
12.由上述方案可见,所述限位块和所述限位销的相互配合,能有效限制所述吸料模组过大幅度转动,从而保障了本实用新型的安全性,防止发生因故障而发生吸料模组大幅度转动破坏管线或损坏其他机构等意外事故。
13.一个优选方案是,所述载板模组还包括安装板和安装架,所述安装板设置在所述三轴移动机构活动端,所述安装架包括支承板和三角支承架,所述支承板设置在所述安装板的底部,所述三角支承架设置在所述安装板的侧端且与所述支承板相连接,进一步地,所述支承板设有与所述中空轴相适配的线孔。
14.由上述方案可见,所述三角支承架可以提高所述支承板的稳定性,从而提高所述支承板的负载能力,所述支承板上的线孔有利于管线的分布。
附图说明
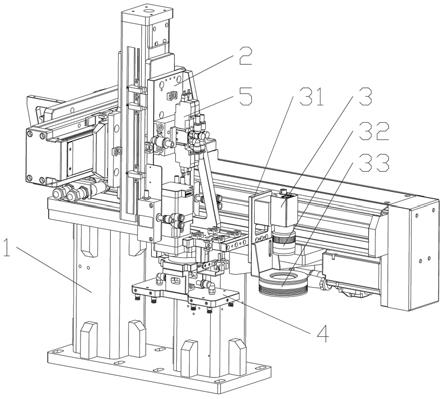
15.图1是本实用新型的立体结构示意图;
16.图2是所述吸料模组立体结构示意图;
17.图3是所述中空旋转平台结构示意图;
18.图4是所述载板模组立体结构示意图。
具体实施方式
19.为了更清楚的理解本实用新型的特征和优点,下面通过实例并结合附图对本实用新型进行进一步的说明。在本实施例中,本实用新型它包括三轴移动机构1、设置在所述三轴移动机构1活动端的载板模组2、设置在载板模组上的视觉模组3以及连接所述载板模组旋转端的吸料模组4,在所述载板模组2的中部和底部还分别设置有电磁阀5、中空旋转平台6,所述电磁阀5的阀口与所述中空旋转平台6的中空轴61相对,所述吸料模组4包括吸料块41、两个固定块42、两个导气阀43和若干吸嘴44,所述吸料块41设置在所述中空轴61的旋转端,两个所述固定块42设置在所述吸料块41上且位于所述中空轴61的正下方,两个所述导气阀43设置在所述吸料块41上且与两个所述固定块42相适配,若干所述吸嘴44分布在所述吸料块41底部。
20.在本实施例中,所述视觉模组3包括设置在所述载板模组2上的固定架31、设置在固定架31上的工业相机32以及设置在所述固定架31上且位于所述工业相机32正下方的光源33。
21.在本实施例中,所述载板模组2上设置有位置传感器21,所述中空轴61的旋转端设置有与所述位置传感器21相适配的挡片611。
22.在本实施例中,所述载板模组上设置有限位块22,所述中空轴61的旋转端设置有与所述限位块22相适配的限位销612。
23.在本实施例中,所述载板模组2还包括安装板7和安装架8,所述安装板7设置在所述三轴移动机构1活动端,所述安装架8包括支承板81和三角支承架82,所述支承板81设置
在所述安装板7的底部,所述三角支承架82设置在所述安装板7的侧端且与所述支承板81相连接,进一步,其特征在于,所述支承板81设有与所述中空轴61相适配的线孔811。
24.本实用新型工作原理:
25.本实用新型的工作时,所述三轴移动机构1带动所述视觉模组3移动到物料上方,通过所述视觉模组3进行精准定位,再通过所述中空旋转平台6转动调整所述吸料模组4的位置,所述所述三轴移动机构1的活动端带动所述载板模组2向下移动,所述吸料模组4通过所述吸料块41底部的若干所述吸嘴44吸取物料,本实用新型将物料搬运到指定位置,完成工作后进行复位。
26.虽然本实用新型的实施例是以实际方案来描述的,但是并不构成对本实用新型含义的限制,需要说明的是,在不冲突的情况下,本申请的实施例及实施例中的特征可以相互组合,对于本领域的技术人员,根据本说明书对其实施方案的修改及与其他方案的组合都是显而易见的。
技术特征:
1.一种高精度坐标机械手搬运机构,其特征在于,它包括三轴移动机构(1)、设置在所述三轴移动机构(1)活动端的载板模组(2)、设置在载板模组上的视觉模组(3)以及连接所述载板模组旋转端的吸料模组(4),在所述载板模组(2)的中部和底部还分别设置有电磁阀(5)、中空旋转平台(6),所述电磁阀(5)的阀口与所述中空旋转平台(6)的中空轴(61)相对,所述吸料模组(4)包括吸料块(41)、两个固定块(42)、两个导气阀(43)和若干吸嘴(44),所述吸料块(41)设置在所述中空轴(61)的旋转端,两个所述固定块(42)设置在所述吸料块(41)上且位于所述中空轴(61)的正下方,两个所述导气阀(43)设置在所述吸料块(41)上且与两个所述固定块(42)相适配,若干所述吸嘴(44)分布在所述吸料块(41)底部。2.根据权利要求1所述的一种高精度坐标机械手搬运机构,其特征在于,所述视觉模组(3)包括设置在所述载板模组(2)上的固定架(31)、设置在固定架(31)上的工业相机(32)以及设置在所述固定架(31)上且位于所述工业相机(32)正下方的光源(33)。3.根据权利要求1所述的一种高精度坐标机械手搬运机构,其特征在于,所述载板模组(2)上设置有位置传感器(21),所述中空轴(61)的旋转端设置有与所述位置传感器(21)相适配的挡片(611)。4.根据权利要求1所述的一种高精度坐标机械手搬运机构,其特征在于,所述载板模组上设置有限位块(22),所述中空轴(61)的旋转端设置有与所述限位块(22)相适配的限位销(612)。5.根据权利要求1所述的一种高精度坐标机械手搬运机构,其特征在于,所述载板模组(2)还包括安装板(7)和安装架(8),所述安装板(7)设置在所述三轴移动机构(1)活动端,所述安装架(8)包括支承板(81)和三角支承架(82),所述支承板(81)设置在所述安装板(7)的底部,所述三角支承架(82)设置在所述安装板(7)的侧端且与所述支承板(81)相连接。6.根据权利要求5所述的一种高精度坐标机械手搬运机构,其特征在于,所述支承板(81)设有与所述中空轴(61)相适配的线孔(811)。
技术总结
本实用新型旨在提供一种结构紧凑、美观实用的高精度坐标搬运机构。本实用新型包括三轴移动机构、设置在所述三轴移动机构活动端的载板模组、设置在载板模组上的视觉模组以及连接所述载板模组旋转端的吸料模组,在所述载板模组的中部和底部还分别设置有电磁阀、中空旋转平台,所述电磁阀的阀口与所述中空旋转平台的中空轴相对,所述吸料模组包括吸料块、两个固定块、两个导气阀和若干吸嘴,所述吸料块设置在所述中空轴的旋转端,两个所述固定块设置在所述吸料块上且位于所述中空轴的正下方,两个所述导气阀设置在所述吸料块上且与两个所述固定块相适配,若干所述吸嘴分布在所述吸料块底部。本实用新型可应用于高精度搬运机械手技术领域。术领域。术领域。
技术研发人员:钟卓超 黎勇 董争武 阳斌
受保护的技术使用者:珠海博杰电子股份有限公司
技术研发日:2021.12.07
技术公布日:2022/9/15
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1