一种恒定张力控制结构的制作方法
1.本实用新型涉及机械技术领域,具体为一种恒定张力控制结构。
背景技术:
2.金刚石线锯也称为金刚线,是指利用电镀工艺或树脂结合的方法,将金刚石磨料固定在金属线上,目前金刚石线锯在太阳能领域、led领域和切割领域应用广泛。金刚石线锯根据生产工艺不同,分为电镀型和树脂型,电镀型指用电镀的方法在金属线上镀金属,一般为镍或镍钴合金,并在金属内固结金刚石磨料;树脂型指用树脂作为结合剂,将金刚石磨料固结在金属线上。
3.电镀金刚石线锯一般制造过程为先在一个放线装置上将金属线放出,放出后的金属线上砂完毕后,再通过收线装置收卷到工字轮上。收线装置一般是通过电机转动工字轮,将金属线一圈一圈地收卷到工字轮上。在工字轮收线过程中,金属线的松紧程度时刻在发生变化,即金属线会时而张紧、时而松弛,而松弛的金属线会导致金属线在上砂工序中易出现金属内固结的金刚石磨料分布不均匀、固结不牢固等现象,严重影响成品金刚线产品的质量。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本实用新型提供了一种恒定张力控制结构,解决了上述背景技术中提出的问题。
6.(二)技术方案
7.为实现以上目的,本实用新型通过以下技术方案予以实现:一种恒定张力控制结构,包括机架以及沿着金刚石线锯的走线方向依次设置的引入轮、张力轮、支撑轮、引出轮,所述机架上竖向设置有导向杆,所述导向杆上滑动适配有导向块,所述张力轮设置在导向块上,所述引入轮、支撑轮、引出轮设置在机架上,所述引入轮、张力轮、引出轮呈v型分布,所述机架上设置有用于检测导向块高度的高度检测组件。
8.优选的,所述高度检测组件包括滑杆、滑动适配在滑杆上的滑板、距离传感器以及控制器,所述滑杆竖向设置在机架上,所述滑板与导向块相连,所述距离传感器设置在滑杆的底部且与滑板上下对应,所述距离传感器连接控制器。
9.优选的,所述机架上设置有配重轮,所述配重轮设置在张力轮的竖直上方处。
10.优选的,所述张力轮和配重轮上均设置有两个并排的线槽。
11.优选的,所述张力轮上同轴设置有螺柱,所述螺柱上可拆卸式的螺纹连接有配重块。
12.优选的,所述机架上竖向设置有滑轨,所述滑轨上滑动适配有滑块,所述引入轮设置在滑块上,所述机架上竖向设置有电动推杆,所述电动推杆的输出端与滑块相连。
13.(三)有益效果
14.本实用新型提供了一种恒定张力控制结构。具备以下有益效果:
15.1、该恒定张力控制结构,金刚石线锯依次绕过引入轮、张力轮、支撑轮和引出轮;通过张力轮的重量将金刚石线锯压紧,实现工作过程中的张紧,当发生收线的突然停顿,之后再次正常工作,此时放线速度不变,张力轮会随着导向块下降,通过距离传感器的检测到导向块的当前位移量,且通过控制器控制收线装置的电机加速旋转,来调节张力轮的位置,确保张力轮提升至导向杆的中间位置,使张力保持工作状态下的均匀一致。
附图说明
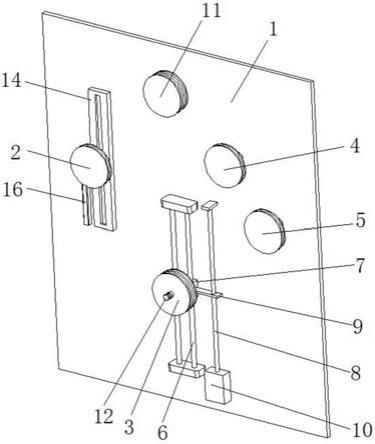
16.图1为本实用新型的轴测图;
17.图2为本实用新型的配重块与张力轮连接图;
18.图3为本实用新型的实施例一示意图;
19.图4为本实用新型的实施例二示意图。
20.图中:1机架、2引入轮、3张力轮、4支撑轮、5引出轮、6导向杆、7导向块、8滑杆、9滑板、10距离传感器、11配重轮、12螺柱、13配重块、14滑轨、15滑块、16电动推杆、17线槽、18金刚石线锯。
具体实施方式
21.本实用新型提供一种恒定张力控制结构,如图1-4所示,包括机架1以及沿着金刚石线锯18的走线方向依次设置的引入轮2、张力轮3、支撑轮4、引出轮5。
22.金刚石线锯18从引出轮5出线后进入收线装置,金刚石线锯18的动力来之收线装置,收线装置为工字型的收线辊和带动其转动的电机组成,为现有技术,并非本案重心,具体不再赘述。
23.机架1上竖向设置有导向杆6,导向杆6上滑动适配有导向块7,张力轮3设置在导向块7上,张力轮3根据其重力带动导向块7在导向杆6上自由向下滑动。引入轮2、支撑轮4、引出轮5设置在机架1上,引入轮2、张力轮3、引出轮5呈v型分布,使张力轮3下压金刚石线锯18对其形成张紧力。
24.机架1上竖向设置有滑轨14,滑轨14上滑动适配有滑块15,引入轮2设置在滑块15上,机架1上竖向设置有电动推杆16,电动推杆16的输出端与滑块15相连。通过电动推杆16调节引入轮2的高度。
25.机架1上设置有用于检测导向块7高度的高度检测组件。
26.如图1所示,高度检测组件包括滑杆8、滑动适配在滑杆8上的滑板9、距离传感器10以及控制器,滑杆8竖向设置在机架1上,滑板9与导向块7相连,距离传感器10设置在滑杆8的底部且与滑板9上下对应,距离传感器10为现有的市售产品,用于检测滑板9的高度。距离传感器10连接控制器。距离传感器10将检测的滑板9高度数据传输至控制器,控制器根据设定的程序,自动调节收线装置的收线电机,控制器程序并非本案保护重心,具体不再赘述。
27.金刚石线锯18依次绕过引入轮2、张力轮3、支撑轮4和引出轮5;通过张力轮3的重量将金刚石线锯18压紧,实现工作过程中的张紧,当发生收线的突然停顿,之后再次正常工作,此时放线速度不变,张力轮3会随着导向块7下降,通过距离传感器10的检测到导向块7的当前位移量,且通过控制器控制收线装置的电机加速旋转,来调节张力轮3的位置,确保
张力轮3提升至导向杆的中间位置,使张力保持工作状态下的均匀一致。
28.由于不同型号的金刚石线锯18,其所需的收线张紧力不同。
29.如图3所示,本实用新型调节张紧力的实施例一,张力轮3上同轴设置有螺柱12,螺柱12上可拆卸式的螺纹连接有配重块13。利用配重块13装载到张力轮3上来实现张力轮3的重量,使金刚石线锯18的张紧力可调。根据不同的张紧力需求装上适配重量的配重块13。
30.如图4所示,本实用新型调节张紧力的实施例二,在机架1上设置配重轮11,配重轮11设置在张力轮3的竖直上方处。张力轮3和配重轮11上均设置有两个并排的线槽17。使金刚石线锯18可以在张力轮3与配重轮11之间绕两圈。
31.使用时,将金刚石线锯18从引入轮2进入,绕过张力轮3的底部和配重轮11顶部两圈,之后从配重轮11绕出进入支撑轮4、引出轮5。配重轮11可根据不同张力的需求使用。
32.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
技术特征:
1.一种恒定张力控制结构,其特征在于:包括机架(1)以及沿着金刚石线锯(18)的走线方向依次设置的引入轮(2)、张力轮(3)、支撑轮(4)、引出轮(5),所述机架(1)上竖向设置有导向杆(6),所述导向杆(6)上滑动适配有导向块(7),所述张力轮(3)设置在导向块(7)上,所述引入轮(2)、支撑轮(4)、引出轮(5)设置在机架(1)上,所述引入轮(2)、张力轮(3)、引出轮(5)呈v型分布,所述机架(1)上设置有用于检测导向块(7)高度的高度检测组件。2.根据权利要求1所述的一种恒定张力控制结构,其特征在于:所述高度检测组件包括滑杆(8)、滑动适配在滑杆(8)上的滑板(9)、距离传感器(10)以及控制器,所述滑杆(8)竖向设置在机架(1)上,所述滑板(9)与导向块(7)相连,所述距离传感器(10)设置在滑杆(8)的底部且与滑板(9)上下对应,所述距离传感器(10)连接控制器。3.根据权利要求1所述的一种恒定张力控制结构,其特征在于:所述机架(1)上设置有配重轮(11),所述配重轮(11)设置在张力轮(3)的竖直上方处。4.根据权利要求3所述的一种恒定张力控制结构,其特征在于:所述张力轮(3)和配重轮(11)上均设置有两个并排的线槽(17)。5.根据权利要求1所述的一种恒定张力控制结构,其特征在于:所述张力轮(3)上同轴设置有螺柱(12),所述螺柱(12)上可拆卸式的螺纹连接有配重块(13)。6.根据权利要求1所述的一种恒定张力控制结构,其特征在于:所述机架(1)上竖向设置有滑轨(14),所述滑轨(14)上滑动适配有滑块(15),所述引入轮(2)设置在滑块(15)上,所述机架(1)上竖向设置有电动推杆(16),所述电动推杆(16)的输出端与滑块(15)相连。
技术总结
本实用新型提供一种恒定张力控制结构,包括机架以及沿着金刚石线锯的走线方向依次设置的引入轮、张力轮、支撑轮、引出轮,所述机架上竖向设置有导向杆,所述导向杆上滑动适配有导向块,所述张力轮设置在导向块上,所述引入轮、支撑轮、引出轮设置在机架上,所述引入轮、张力轮、引出轮呈V型分布。金刚石线锯依次绕过引入轮、张力轮、支撑轮和引出轮;当发生收线的突然停顿,之后再次正常工作,此时放线速度不变,张力轮会随着导向块下降,通过距离传感器的检测到导向块的当前位移量,且通过控制器控制收线装置的电机加速旋转,来调节张力轮的位置,确保张力轮提升至导向杆的中间位置,使张力保持工作状态下的均匀一致。力保持工作状态下的均匀一致。力保持工作状态下的均匀一致。
技术研发人员:徐金宝 吕忠光
受保护的技术使用者:浙江零轴智能装备有限公司
技术研发日:2021.12.28
技术公布日:2022/5/17
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1