能量储存和输送系统以及方法与流程
1.本发明涉及一种能量储存和输送系统,并且具体地说,涉及一种经由块体或砌块的竖直移动来储存和输送电力的能量储存和输送系统以及方法。
背景技术:
2.可再生能源(例如,太阳能、风能、水力、生物质等)发电持续增长。然而,这些可再生能源中的许多能源(例如,太阳能、风能)是间歇性的和不可预测的,从而限制了可以从间歇性可再生能源输送到电网的电量。
技术实现要素:
3.因此,需要一种改进的系统来捕获可再生能源产生的电力,以便可预测地输送到电网。如本文所使用的,电网是用于将电力从生产者输送给消费者的互连网络,并且跨越较大的地理区域,包括城市、州和/或国家。
4.根据本公开的一个方面,提供了一种能量储存和输送系统。一种示例性能量储存和输送系统包括起重机和多个块体,其中起重机可操作,以将一个或更多个块体从较低海拔移动到较高海拔,从而储存能量(例如,经由较高海拔中的块体的势能),并且起重机可操作,以将一个或更多个块体从较高海拔移动到较低海拔,从而产生电力(例如,当块体移动到较低海拔时,经由块体的动能)。
5.根据本公开的另一方面,提供了一种重力驱动的动力储存和输送系统。示例性重力驱动的动力储存和输送系统包括桥式起重机或升降机吊笼,其可操作以通过将一个或更多个块体从较低海拔移动到较高海拔来储存能量,并且可操作以通过在重力作用下将一个或更多个块体从较高海拔移动到较低海拔来产生电力。
6.根据本公开的另一方面,在一个示例中,能量储存和输送系统可以储存太阳能动力以产生非工作时段的电力。能量储存和输送系统可以将多个块体从较低海拔移动到较高海拔,以在太阳能电力充足的白天时段期间将太阳能作为势能储存在块体中。然后,能量储存系统可以在夜间运行,以将块体从较高海拔移动到较低海拔,从而驱动发电机产生用于输送到电网的电力。
7.根据本公开的另一方面,提供了一种用于储存能量和产生电力的方法。该方法包括操作塔架上的起重机或升降机吊笼,以将多个块体从塔架上的较低海拔移动到塔架上的较高海拔,从而将能量储存在块体中,每个块体储存的能量的量与块体的势能量相对应。该方法还包括操作起重机或升降机吊笼,以在重力作用下将块体从塔架上的较高海拔移动到塔架上的较低海拔,从而产生与所述一个或更多个块体从较高海拔移动到较低海拔时的动能量相对应的电量。该方法包括移动块体,使得在起重机或升降机吊笼运行期间,塔架上的平均载荷大致恒定。
8.根据本发明的一个方面,提供了一种包括一个或更多个模块的能量储存和输送系统。每个模块包括多个块体和在由水平延伸的多个排限定的地基上方具有竖直高度的框
架。框架包括具有第一组排的上部区段,该第一组排的每一排被配置为在其上接收和支撑多个块体;具有第二组排的下部区段,该第二组排的每一排被配置为在其上接收和支撑多个块体;在上部区段和下部区段之间的没有块体的中间区段;设置在多个排的相对端上的升降机竖井对;以及升降机吊笼,其可移动地设置在该升降机竖井对的每一个升降机竖井中并且可操作地联接到电动机-发电机上,该升降机吊笼的大小适于在其中接收和支撑一个或更多个块体。该升降机竖井对的每一个升降机竖井中的升降机吊笼可操作,以将一个或更多个块体从第二组排的交替排移动到第一组排的相应交替排,从而储存与所述块体的势能量相对应的电能量。升降机竖井对的每一个升降机竖井中的升降机吊笼可操作,以在重力作用下将一个或更多个块体从第一组排的交替排移动到第二组排的相应交替排,从而产生一定量的电力。升降机吊笼沿着相同的竖直距离在第二组排的每一排和相应第一组排的每一排之间移动所述块体。
9.根据本公开的另一方面,提供了一种能量储存和输送系统。该系统包括多个块体和在由水平延伸的多个排限定的地基上方具有竖直高度的框架。框架包括具有第一组排的上部区段,该第一组排的每一排被配置为在其上接收和支撑多个块体;具有第二组排的下部区段,该第二组排的每一排被配置为在其上接收和支撑多个块体;在上部区段和下部区段之间的没有块体的中间区段;以及设置在多个排的相对端上的升降机竖井对。小车可移动地联接到第一组排和第二组排中的一个组排或两个组排中的每一排,该小车可操作,以在该排中的块体下方行进,并且被配置为提升块体,以使所述块体沿着该排水平移动。升降机吊笼可移动地设置在升降机竖井对的每一个升降机竖井中,并且可操作地联接到电动机-发电机。升降机吊笼的大小适于经由小车接收来自一个排上的块体,并且在沿着升降机竖井移动的同时在其中支撑块体。该升降机竖井对的每一个升降机竖井中的升降机吊笼可操作,以将一个或更多个块体从第二组排的交替排移动到第一组排的相应交替排,从而储存与所述块体的势能量相对应的电能量。升降机竖井对的每一个升降机竖井中的升降机吊笼可操作,以在重力作用下将一个或更多个块体从第一组排的交替排移动到第二组排的相应交替排,从而产生一定量的电力。升降机吊笼沿着相同的竖直距离在第二组排的每一排和相应第一组排的每一排之间移动所述块体。
10.根据本公开的另一方面,提供了一种用于储存能量和产生电力的方法。该方法包括在框架的多个排的相对端上操作一升降机吊笼对,以在框架的上部区段的第一组排和框架的下部区段的相应第二组排之间移动多个块体,框架的下部区段的相应第二组排设置在框架的中间区段的下方,该中间区段中没有块体。操作该升降机吊笼对包括利用该升降机吊笼对将一个或更多个块体从第二组排的交替排移动到第一组排的相应交替排,以储存与所述块体的势能量相对应的电能。操作该升降机吊笼对还包括在重力作用下利用该升降机吊笼对将一个或更多个块体从第一组排的交替排移动到第二组排的相应交替排,以经由与升降机吊笼电联接的电动机-发电机产生一定量的电力。升降机吊笼使所述块体在第二组排的每一排和相应第一组排的每一排之间移动相等的竖直距离。
11.根据本公开的另一方面,提供了一种用于储存能量和产生电力的方法。该方法包括利用小车使一个或更多个块体沿着框架的上部区段中的第一组排的交替排朝向该排的相对端上的升降机吊笼水平移动。该方法还包括操作升降机吊笼,以在重力作用下使一个或更多个块体竖直移动经过框架的中间区段到达框架的第二组排的相应交替排,从而经由
与升降机吊笼电联接的电动机-发电机产生一定量的电力。升降机吊笼使所述块体在第一组排的交替排和相应交替的第二组排的每一排之间移动相等的竖直距离。
12.根据本公开的另一方面,提供了一种能量储存和输送系统。该系统包括多个块体以及在框架底端和框架顶端处的一个或更多个轨道之间延伸的框架。框架在底端和顶端之间具有多个列。每个列被配置为经由附接至前支柱和后支柱的一个或更多个立柱在该列的不同竖直位置处在该列的前支柱和该列的后支柱之间可移动地支撑一组块体,所述一个或更多个立柱接合块体的相应立柱,使得一个列中的块体保持彼此间隔开。该系统还包括一个或更多个起重机,该一个或更多个起重机可移动地安装到一个或更多个轨道上,并且被配置为在一个或更多个列上沿着轨道水平行进。该系统还包括与一个或更多个起重机电联接的电动机-发电机。一个或更多个起重机可操作,以与一个列中的一个或更多个块体联接,以便将所述一个或更多个块体从该列的较低海拔处移动到该列的较高海拔处,从而储存与所述一个或更多个块体的势能量相对应的电能量,并且在重力作用下将所述一个或更多个块体从该列的较高海拔处移动到该列的较低海拔处,以经由电动机-发电机产生一定量的电力。每个块体在较低海拔和较高海拔之间的竖直距离是相同的。
13.根据本公开的另一方面,提供了一种用于储存能量和产生电力的方法。该方法包括操作可移动地安装到框架顶部的一个或更多个轨道上的起重机,以使多个块体在框架的列的较低海拔和列的较高海拔之间移动。每个块体在较低海拔和较高海拔之间的竖直距离是相同的。操作起重机包括将起重机与框架的一个列中的一个或更多个块体联接,并且将所述一个或更多个块体从该列的较低海拔处移动到该列的较高海拔处,以储存与所述一个或更多个块体的势能量相对应的电能量。操作起重机还包括将起重机与框架的一个列中的一个或更多个块体联接,并且在重力作用下将所述一个或更多个块体从该列的较高海拔处移动到该列的较低海拔处,以经由与起重机电连接的电动机-发电机产生一定量的电力。
14.根据本公开的另一方面,提供了一种升降机吊笼,其用于在能量储存和输送系统中使用,以使块体在塔架的较低海拔和塔架的较高海拔之间移动,从而储存能量,并且在重力作用下使块体在塔架的较高海拔和塔架的较低海拔之间移动,从而产生电力。升降机吊笼包括顶部支撑件、附接至顶部支撑件并且横向于该顶部支撑件延伸的侧部支撑件对、附接至该对侧部支撑件并且横向于该对侧部支撑件延伸的底部支撑件,顶部支撑件、侧部支撑件对和底部支撑件限定了与块体的形状大致相对应的开口。升降机吊笼还包括一个或更多个导轨部分对,该一个或更多个导轨部分对附接至侧部支撑件对并且与该侧部支撑件横向延伸。一个或更多个导轨部分对中的每一导轨部分对被配置为与塔架中一个排的横梁对对齐,以允许将块体从该横梁对转移到该导轨部分对。
15.根据本公开的另一方面,提供了一种升降机吊笼,其用于在能量储存和输送系统中使用,以使块体在塔架的较低海拔和塔架的较高海拔之间移动,从而储存能量,并且在重力作用下使块体在塔架的较高海拔和塔架的较低海拔之间移动,从而产生电力。升降机吊笼包括顶部支撑件和框架,该框架包括沿着平面延伸的后部支撑件以及附接至后部支撑件并且横向于该后部支撑件延伸的一个或更多个侧臂。升降机吊笼还包括一个或更多个可致动的支撑件,该一个或更多个可致动的支撑件可移动地联接到后部支撑件上,并且被配置为在缩回位置和伸出位置之间移动,在缩回位置,一个或更多个可致动的支撑件相对于侧臂横向延伸,在伸出位置,一个或更多个可致动的支撑件相对于后部支撑件的平面横向延
伸。处于伸出位置的一个或更多个可致动支撑件被配置为当块体邻近后部支撑件时在其上支撑块体的底部。
附图说明
16.图1是用于根据需要储存能量和产生电力的能量储存和输送系统的示意性透视图;
17.图2是图1的系统的局部示意图,其示出了系统的底部部分;
18.图3是图1的系统的局部示意图,其示出了系统的顶部部分;
19.图4a-4d是图1的系统的示意图,其示出了用于储存能量的块体的移动顺序;
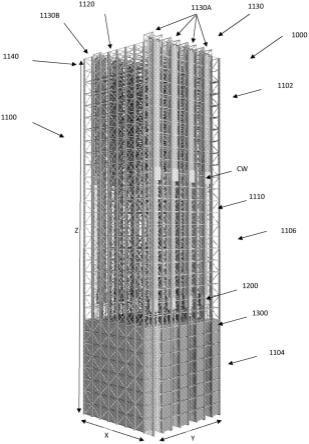
20.图5是用于根据需要储存能量和产生电力的能量储存和输送系统的示意性透视图;
21.图6是图5的系统的一部分的示意图;
22.图7是能量储存和输送系统的局部示意图,其示出了与图5中系统类似的两个相邻模块的塔架的上部部分中的块体的布置;
23.图8是能量储存和输送系统的四个模块的示意性俯视图,每个模块都与图5中的系统类似,这些模块彼此相邻布置;
24.图9是图5中系统的一个排和升降机组件的局部示意图,其示出了块体朝向升降机组件的移动;
25.图10是图5中系统的一部分的示意性透视图,其示出了与系统的一个排的横梁可移动地联接的小车,并且示出了支撑在所述排的横梁上的块体;
26.图11是图10中系统的示意性俯视图,其示出了与系统的一个排的横梁可移动地联接的小车,并且示出了支撑在所述排的横梁上的块体;
27.图12是图10中系统的示意性端视图,其示出了与系统的一个排的横梁可移动地联接的小车,并且示出了支撑在所述排的横梁上的块体;
28.图13-19是图5的系统的局部示意图,其示出了用于使块体沿着塔架的一排移动并且将块体转移到升降机吊笼以在系统的升降机竖井中竖直移动的步骤顺序;
29.图20是图5中系统的示意性端视图,其示出了塔架中块体的布置以及块体从塔架的上部部分到塔架的下部部分用于产生电力的移动;
30.图20a-20d是图5中系统的示意性端视图,其示出了块体从塔架的上部部分到塔架的下部部分用于产生电力的移动;
31.图21是用于经由能量储存和输送系统的升降机竖井使一个或更多个块体同时移动的升降机吊笼的示意性侧视图;
32.图22a-22b是用于经由能量储存和输送系统的升降机竖井使一个或更多个块体同时移动的升降机吊笼的示意性侧视图。
具体实施方式
33.下面公开的是一种能量储存和输送系统,该能量储存和输送系统可操作,以将电力转换成势能,并且在需要电力时利用势能产生电力。能量储存和输送系统可操作地联接到电网,以用于稳定电网并且为住宅、商业和/或工业消费者输送电力。
34.图1-3示出了示例性能量储存和输送系统100。系统100包括限定一个或更多个列112(例如,四列)和一个或更多个排114(例如,十排)的框架或塔架110。框架或塔架110可以包括多个(例如,钢筋混凝土)支柱116和横向构件117(例如,缆绳),其为框架或塔架110提供侧向稳定性(例如,为支柱116提供对角斜撑)。框架或塔架110可以支撑在一个或更多个(例如在多个)基脚230上。如图1和图3中最佳示出的,系统100可以具有一个或更多个起重机120。一个或更多个起重机120可以是桥式起重机。(多个)起重机120可移动地联接到框架或塔架110的上部部分111上,并且可以沿着一个或更多个导轨115在列112之间(水平地)移动。
35.系统100包括多个压载重物或块体130(在本公开中也称为砌块)和马达-发电机(图4a-4d中的140)。在一种实施方式中,块体130可以由当地土壤和/或有偿废料(例如,煤燃烧残余物比如底灰等、来自停用的风力涡轮机叶片的玻璃纤维、来自采矿过程的废尾矿)制成。在一种实施方式中,(多个)块体130可以具有比高度或宽度更大的长度(例如,大致矩形的纵向横截面和大致方形的横向横截面)。多个块体130(例如,两个块体130)可以在列112的每一列中行进。在一种实施方式中,每个块体130仅在其相关联的列112内行进。如图1所示,每个块体130的竖直行进距离是相同的。例如,相对于同一列112中的其他块体130,每个列112中最顶部的块体130可以在框架或塔架110的上部部分111中的最高位置和框架或塔架110的下部部分118中的最高位置之间行进。类似地,相对于同一列112中的其他块体130,每个列112中最底部的块体130可以在框架或塔架110的下部部分118中的最底部位置和框架或塔架110的上部部分111中的最底部位置之间行进。
36.(多个)起重机120可以选择性地与一个或更多个块体130联接(例如,经由缆绳122和吊钩、铰链或其他抓取器机构220)。为了储存电力或其他形式的能量,起重机120将压载重物或块体130提升到框架或塔架110的较高海拔(例如,顶部)处,在此处,压载重物或块体被锁定就位,如下文进一步描述的。为了释放能量并且产生电力,通过起重机120将压载重物或块体130从框架或塔架110的较高海拔(例如,顶部)下降到框架或塔架110的较低海拔(例如,底部)(例如,在重力作用下)。当块体130下降时,块体130上的力(例如,重力)用于使马达-发电机旋转以产生电力,该电力可以输送到与马达-发电机电连接的电网。
37.在一种实施方式中,压载重物或块体130是具有内部压载质量并且重量大致为67,000磅的运输集装箱。每个起重机120可以包括多个缆绳122和抓取器220,当通过起重机120提升或降低压载重物或块体130时,该抓取器可以牢固地保持住该压载重物或块体。当从水平平面观察时,缆绳122和抓取器220可以在压载重物或块体130的上方及其周边之外工作。以这种方式,抓取器220可以向下延伸并且联接到(例如抓取)压载重物或块体130,即使多个压载重物或块体130竖直位于起重机120和正在被抓取或提升的压载重物或块体130之间。
38.在一种实施方式中,每个压载重物或块体130可以经由块体130的一个或更多个立柱132(例如,附接或嵌入块体130中的金属立柱)可移除地联接到框架或塔架110上,该块体的一个或更多个立柱接合附接至框架或塔架110的支柱116的一个或更多个立柱250。立柱250可以经由三个或更多个接触点(例如,块体130的立柱132)保持(例如,支撑)每个压载重物或块体130(在固定的竖直位置)。在一种实施方式中,立柱250是可移动的(例如,可伸缩的)。例如,通过电气、液压或气动方式,立柱250可以在伸出位置和缩回位置之间致动(例
如,在与限定列112的支柱116大致平行的方向上线性延伸),在伸出位置,立柱250可以在其上支撑压载重物或块体130的至少一部分(在固定的竖直位置),在缩回位置,立柱250不接合压载重物或块体130,从而允许压载重物或块体130移动经过立柱250的位置而不接合立柱250。在另一种实施方式中,立柱250永久固定到框架或塔架110上(例如,永久固定到框架或塔架110的支柱116上),例如在大致横向于支柱116的定向上。当起重机120使压载重物或块体130与立柱250对齐时,通过起重机120可以使压载重物或块体110上下移动,以接合立柱250。为了使压载重物或块体130移动经过立柱250,起重机120可以提升块体130、使其沿着一个排114侧向(例如,水平地)移位,使得块体130摆脱立柱250、并且将块体130提升或下降到框架或塔架110上的期望竖直位置。一旦到达框架或塔架110上的期望竖直位置,起重机120可以使块体130沿着相反方向侧向(例如,水平地)移位,使得该块体与立柱250对齐,并且使块体130下降,以在所述期望的竖直位置接合立柱250。在图1-3所示的系统100中,压载重物或块体130不彼此接触,并且不在彼此上堆叠。
39.图4a-4b示出了概略图示的顺序,这些概略图示示出了利用起重机420在能量储存系统400的框架或塔架410内提升压载重物或块体440a、440b。能量储存系统400可以类似于能量储存系统100。因此,用于表示系统400的各种部件的附图标记与用于标识图1-3中的系统100的相应部件的附图标记相同,除了在数字标识符的前面添加了“4”。因此,图1-3中的系统100的各种特征的结构和描述应理解为也适用于图4a-4d中的系统400的相应特征,以下描述除外。
40.为了储存电力或其他形式的能量,起重机420(例如桥式起重机)滚动到待提升的压载重物或块体440a(例如运输集装箱)上方的位置。缆绳422下降,直到抓取器424能够牢固地附接至压载重物或块体440a(例如运输集装箱)。如图4b所示,在一种实施方式中,将立柱450a缩回并且使用马达-发电机140将运输集装箱440a提升到框架或塔架410顶部处的新位置。一旦就位,可伸缩的立柱460a伸出(例如,从框架或塔架410伸出),以保持压载重物或块体440a(例如,运输集装箱)。例如,在升高位置,压载重物或块体440a可以在其初始位置上方大致100米处。为了储存额外的电力或其他形式的能量,起重机420可以使缆绳422下降,直至抓取器424能够牢固地附接至压载重物或块体440b(例如,运输集装箱),如图4c所示。如图4b所示,立柱450a缩回,并且使用马达-发电机140将运输集装箱440b提升到框架或塔架410的新位置(例如,顶部附近)。一旦就位,可伸缩的立柱460b伸出(例如,从框架或塔架410伸出),以保持压载重物或块体440b(例如,运输集装箱)。例如,在升高位置,压载重物或块体440b可以在其初始位置上方大致100米处。压载重物或块体440a、440b不彼此接触,并且不在彼此上堆叠。在另一种实施方式中,立柱450a、450b、460a、460b固定到塔架410上(例如,不可伸缩),并且起重机420使块体440a、440b侧向移位(例如,进入或离开图4a-4b的页面),如上所述,以在块体440a、440b的竖直移动期间摆脱立柱450a、450b、460a、460b,并且一旦到达期望的竖直位置,使块体440a、440b(沿着相反方向)侧向移位,以使块体440a、440b与立柱450a、450b、460a、460b联接。
41.在另一种实施方式中,同时提升一列中的两个或更多个块体440a、440b。例如,抓取器424的间隔距离可以与块体440a、440b之间的距离相对应,以允许抓取器424同时与多个块体440a、440b联接,从而随后同时提升多个块体440a、440b。本领域的技术人员将认识到,上文关于图4a-4b中对块体440a、440b的移动的描述应理解为适用于图1-3的系统中的
块体130的移动。
42.参考图1,在能量储存过程的一种实施方式中,首先提升第一列中的所有块体130,然后提升下一列112中的所有块体130,依此类推。可选地,能量输送过程遵循相反的相同顺序。在能量储存过程的另一种实施方式中,第一列112中的块体130上升,接着是第二列112中的块体130,以此类推,直到所有列112中的块体130都上升。然后,第一列112中的下一个块体130上升,接着是第二列112中的下一个块体130,依此类推。可选地,能量输送过程遵循相反的相同顺序。
43.为了释放能量并且产生电力,起重机420可以使压载重物或块体130,比如一个列112中的块体440a、440b(例如,一次一个、同时多个块体)从框架或塔架410的较高海拔(例如,顶部)下降到框架或塔架410的较低海拔(例如,底部块体440a、440b的初始位置)。当块体440a、440b下降时,马达-发电机140产生电力(例如,通过经由马达-发电机140的旋转将势能的变化转换成电力)。压载重物或块体440a、440b下降的顺序可选地与用于上升压载重物或块体440a、440b的顺序相反。
44.图5-6示出了示例性能量储存和输送系统1000(“系统”),该系统可操作以将电能或电力转换成用于储存的势能,并且将势能转换成例如用于输送至电网的电能或电力。
45.系统1000包括框架或塔架1100(在本公开中也称为模块),该框架或塔架具有在塔架1100的高度方向z上延伸的一个或更多个列1120、在框架或塔架1100的宽度方向x上延伸的一个或更多个排或层1140、以及由一组排1140和一组列1120在框架或塔架1100的深度方向y上限定的一个或更多个结构1110(例如,模块1100的片段)。每个结构1110(例如,模块1100的片段)可以依据来自系统1000的能量的需求而独立操作。框架1100具有上部区段1102、下部区段1104和中间区段1106。在一种实施方式中,如下文进一步描述的,压载重物或块体1300在上部区段1102和下部区段1104之间移动,以允许中间区段1106用于其他目的。
46.在一种实施方式中,中间区段1106可以用于竖直耕作。例如,中间区段1106可以如温室一样运行,从而提供照明的水培耕作,其中这种照明可以由能量储存和输送系统1000产生的电力(例如,通过使块体1300下降)供电。在另一种实施方式中,中间区段1106可以用于储存水。在另一种实施方式中,中间区段1106可以用作储存材料的仓库(例如,储存材料,无人看管)。在再一种实施方式中,中间区段1106可以用作数据中心(例如,储存计算机服务器),其中数据中心可以由能量储存和输送系统1000产生的电力(例如,通过使块体1300下降)供电。因此,中间区段1106可以被有效使用,并且在系统1000的运行期间不会一直是空的,从而为系统1000提供附加价值。
47.上部区段1102和下部区段1104可以具有相同的大小(例如,相同数量的排1140和列1120)。在一些实施方式中,上部区段1102和下部区段1104中的排1140的数量均为偶数(例如,8、10、12排)。在其他实施方式中,上部区段1102和下部区段1104中的排1140的数量均为奇数(例如,9、11、13排)。
48.在一种实施方式中,上部区段1102和下部区段1104分别占有框架或塔架1100的高度或面积的1/4,中间区段1106占有框架或塔架1100的高度或面积的其余1/2。在另一种实施方式中,上部区段1102和下部区段1104分别占有框架或塔架1100的高度或面积的1/3,中间区段1106占有框架或塔架1100的高度或面积的其余1/3。
49.框架1100包括多个升降机竖井1130。例如,框架1100可以在排1140的一端具有(多个)升降机竖井1130a并且在排1140的相对端具有(多个)升降机竖井1130b(对于每个结构1110),经由这些升降机竖井,块体1300在框架1100的上部区段1102中的一个或更多个排1140和下部区段1104中的一个或更多个排之间移动,如下文进一步描述的。在一种实施方式中,框架或塔架1100的排1140的一端上的升降机竖井1130a的数量与排1140的相对端上的升降机竖井1130b的数量相等。在一种实施方式中,框架或塔架1100可以具有30层建筑的高度(例如,大致90米高)。然而,框架或塔架1100可以具有小于或大于30层建筑的高度(例如,120米高)。继续参考图5,将块体1300沿着排1140水平移动(经由每一排1140中的小车,如下文进一步描述的)到排1140的端部处的升降机竖井1130a、1130b,然后经由在每个升降机竖井1130a、1130b中的升降机吊笼1200(如下文更加详细描述的)沿着升降机竖井1130a、1130b竖直移动。升降机吊笼1200(例如,在重力的作用下)移动到较低海拔以产生电力,并且通过塔架或框架1100顶部处的马达-发电机(图9中的1500)上升。配重cw有助于升降机吊笼1200的移动。升降机吊笼1200在相对的升降机竖井1130a、1130b中的移动是同步的,以使系统1000的效率最大化。
50.升降机竖井1130a、1130b之间的排1140越长,排1140可以保持的块体1300(例如质量)越多,并且系统1000可以输送的能量(例如小时的能量)越大。升降机竖井1130a、1130b(在y方向上)的深度越大(例如,y方向上的结构1110或模块1100的片段的数量越大),系统1000可以产生的电量越大。在一种实施方式中,升降机吊笼1200在每个升降机竖井1130a、1130b中的运行可以提供大约500kw到大约1000kw之间(例如,大约800kw)的功率,使得一个结构1110或模块1100的一个片段中的两个升降机竖井1130a、1130b可以产生大致1.6mw的功率。在y方向上具有八个结构1110(例如,模块1100的片段)的系统中,每个结构1110具有两个升降机竖井1130、1130b,该系统可以产生大致12.8mw的功率。假设排1140的长度允许四个小时的能量,系统的总输出大致为12.8mw
×
4小时或每小时51.2mw。
51.如图6中最佳示出的,框架1100可以由多个支柱1160(例如钢筋混凝土的支柱、混凝土预铸造柱)、横向构件1170(例如对角斜撑构件,由金属制成)以及多个横梁(例如i形横梁)1180制成,多个支柱限定了一个或更多个列1120,横向构件使列1120互相连接以为框架1100提供稳定性(例如在框架1100的宽度方向x上),多个横梁限定了一个或更多个排1140并且支撑在横向横梁1190上,这些横向横梁在列1120之间沿着框架1100的深度方向y延伸。横梁1180和横向横梁1190可以由金属(例如钢)制成。列1120可以在框架1100的深度方向y上彼此间隔开距离1122,并且排1140可以在框架1100的高度方向z上彼此间隔开距离1142。距离1122、1142的大小适于允许将一个或更多个块体1300装配在每一排中(一排接一排),使得块体1300支撑在横梁1180上,如下文进一步讨论的。在一种实施方式中,距离1122、1142是相同的,从而允许块体1300具有基本呈方形的端面(见图12),例如以简化块体1300的制造。在一种实施方式中,块体1300可以由当地土壤和/或有偿废料(例如,煤燃烧残余物比如底灰等、来自停用的风力涡轮机叶片的玻璃纤维、来自采矿过程的废尾矿)或其他回收材料制成。
52.图7示出了能量储存和输送系统1000’的一部分的局部透视图,该能量储存和输送系统具有彼此相邻布置的两个模块1000a、1000b。模块1000a、1000b各自类似于图5-6所示的能量储存和输送系统1000的模块1100。因此,用于表示模块1000a、1000b的各种部件的附
图标记与用于标识图5-6中的模块1100的相应部件的附图标记相同,除了在数字标识符的末尾添加了“a”或“b”。因此,图5-6中的模块1100的各种特征的结构和描述应理解为也适用于图7中的系统1000’的模块1000a、1000b的相应特征,以下描述除外。
53.模块100a、100b的升降机竖井1130aa、1130ab可以彼此相邻,并且两个模块1000a、1000b(例如,在上部区段1102a、1102b中)的排1140a、1140b定向在大致相同的方向上(例如,对齐)。如图7所示,在系统1000’的模块1000a、1000b的框架1100a、1100b的中间区段1106a、1106b中没有储存块体1300。如上所述,中间区段1106a、1106b可以用于其他目的。可选地,模块1100a的中间区段1106a用于的目的与模块1100b的中间区段1106b的不同。
54.图8示出了能量储存和输送系统1000”的俯视图或平面图,该能量储存和输送系统包括彼此相邻布置的四个模块1000a、1000b、1000c、1000d。模块1000a、1000b、1000c、1000d各自类似于图5-6所示的模块1100。因此,用于表示模块1000a、1000b、1000c、1000d的各种部件的附图标记与用于标识图5-6中的模块1100的相应部件的附图标记相同,除了在数字标识符的末尾添加了“a”、“b”、“c”或“d”。因此,图5-6中的系统或模块1100的各种特征的结构和描述应理解为也适用于图8中的系统1000”的模块1000a、1000b、1000c、1000d的相应特征,以下描述除外。
55.与模块1100一样,模块1000a-1000d中的每一个在系统各排的相对端上都具有两组升降机竖井。例如,模块1000a在排1140a的相对端上具有升降机竖井1130aa和1130ba,模块1000b在排1140b的相对端上具有升降机竖井1130ab和1130bb,模块1000c在排1140c的相对端上具有升降机竖井1130ac和1130bc,并且模块1000d在排1140d的相对端上具有升降机竖井1130ad和1130bd。
56.如图8所示,模块1000a、1000b、1000c、1000d中的每一个均定向为,使得其各组排1140a、1140b、1140c、1140d中的每一排与相邻模块1000a-1000d中的各排正交(例如垂直)延伸。例如,模块1000a的排1140a与模块1000b的排1140b和模块1000d的排1140d正交延伸。模块1000a-1000d之间的这种正交布置增加了模块1000a-1000d中每个模块的稳定性,从而有利于在任何方向上为模块1000a-1000d提供自动斜撑(例如,抵抗风力和/或地震力的斜撑)。如上所述,横向构件1170(例如,对角斜撑)使列1120互相连接,以沿着排1140的方向为模块1100提供稳定性(例如,在框架1100的宽度方向x上)。然而,在框架或模块1100的横向方向上不存在横向构件。因此,使模块1000a-1000d彼此正交定向有利于允许一个框架1100中的横向构件1170在相邻模块1000a-1000d不具有任何横向构件1170的方向上为这些相邻模块提供结构稳定性或斜撑。模块1000a-1000d中的每一个都可以彼此独立地操作。例如,在操作期间,可以操作模块1000a-1000d中的一个或更多个(例如,一个、两个、三个或四个)模块以储存和产生电力(例如,依据需求),或者只能操作模块1000a-1000d中的一些模块,同时对其余模块1000a-1000d进行维护。
57.尽管图8示出了四个模块1000a-1000d,但本领域的技术人员将认识到,系统1000”可以具有任意数量的模块(例如,两个、三个、五个、六个、七个、八个、十个、十二个),这些模块可以可选地以上述方式进行布置。因此,能量储存和输送系统是可扩展的,并且可以提供大约几千兆瓦时(gwh)的能量储存和输送。模块1000a-100d可以在清洁能源发电站(例如,太阳能场、风能场)附近运行,并且进行运行以储存清洁能源发电站的至少一部分能量(例如,用于在比如晚上等非工作时段输送至电网)。
58.图9-12示出了用于使块体1300沿着排1140移动的系统1000的特征,并且以上对系统1000的特征的所有描述都适用于图9-12所示的特征。本领域的技术人员将认识到,图9-12中以及下面描述的相同特征可以在图7-8中的系统1000’、1000”中实现,因此下面的描述也适用于图7-8中的系统1000’、1000”。
59.参考图9,块体1300可以(例如在固定位置)支撑在框架或塔架1100的一个排1140中的横梁对1180上。横梁1180可以具有i形横梁或c形截面,其在支撑块体1300的横梁1180的顶部(例如,顶部凸缘)和横梁1180的底部(例如,底部凸缘)之间限定了通道1182(在图12中最佳示出)。横梁1180朝向升降机竖井1130延伸,以允许将块体1300转移到升降机竖井1130中的升降机吊笼1400,并且可以操作升降机吊笼1400,以将块体1300移动到不同的竖直位置,如下文进一步描述的。马达-发电机1500可以安装在升降机竖井1130的至少一部分中或安装在该升降机竖井的至少一部分上(例如,在升降机吊笼1400的最高位置上方的竖直位置处)。
60.当从一端观察时,块体1300可以具有大致呈矩形(例如方形)的形状(见图12)。在一种实施方式中,块体1300可以具有一个或更多个(例如,一对)倒角或截角1310,这些倒角或截角通常与支柱1160的锥形端部1162的形状相对应。横梁1180的钩形部分(例如,c形)1183(见图10)可以由在横梁1180下方延伸的支柱1160的锥形端部1162支撑,并且可以至少部分外接在横梁1180上方延伸的支柱1160,以有助于使横梁1180与支柱1160联接,并且将横梁1180侧向固定到支柱1160上(沿着x方向)。如上所述,在一种实施方式中,排1140的宽度1122和高度1142通常相等,并且限定方形形状。在一种实施方式中,块体1300的大小接近排1140的宽度1122和高度1142,同时允许块体1300穿过排1140的开口。
61.小车1200可以可移动地联接到横梁1180上,并且可以选择性地定位于支撑在横梁1180上的块体1300的下方(见图12)。具有在排1140的横梁1180上支撑有一个或更多个块体1300的每个排1140可以具有一个或更多个小车1200,以使块体1300沿着排1140移动。小车1200可以包括框架1230的相对侧上的轮子1210,其中轮子1210在支撑块体1300的(一对)横梁1180的通道1182内移动(例如,转动)(例如,轮子1210在横梁1180的底部凸缘上滚动)。小车1200还包括一个或更多个可致动的支撑活塞1220,例如在框架1230的相对侧上,当小车1200位于块体1300下方时,该支撑活塞面向块体1300的底侧。支撑活塞1220可以在缩回状态和伸出位置之间致动(例如液压、气动、经由电动机电动致动),在缩回状态,支撑活塞1220不接触块体1300,在伸出位置,支撑活塞1220远离框架1230竖直移位(例如向上),以接触并且提升横梁1180上方的块体1300(例如提升大致2cm或1英寸)(例如,使得块体1300的重量仅由支撑活塞1220支撑),从而允许小车1200水平移动块体1300(例如沿着x方向)。在一种实施方式中,如图10-11所示,小车1200可以具有两个支撑活塞对1220和两个轮子组件对1210,每个支撑活塞1220与轮子组件1210中的一个对齐。在另一种实施方式中,支撑件1210可以是平台,其宽度通常与框架1230的宽度相对应,其中平台可以在缩回位置和伸出位置之间移动,在缩回位置,平台不接合块体1300的底部,在伸出位置,平台接触块体1300并且将块体提升离开横梁1180。
62.一旦小车1200将块体1300提升到横梁1180上方(例如,使得块体1300不与横梁1180接触),小车1200可以使块体1300沿着排1140平移(例如,在x方向上水平平移),例如朝向升降机竖井1130平移,以将块体1300转移到升降机吊笼1400,如下文进一步描述的。
63.升降机吊笼1400具有侧壁1412(例如,彼此间隔开的一根或更多根竖直横梁)以及在侧壁1412之间延伸的底部支撑件1420(例如,成对或两条轨道)。升降机吊笼1400还具有导轨部分1484、1486,该导轨部分有利地与横梁1180对齐,从而允许小车1200行进到升降机吊笼1400中,同时支撑块体1300(例如,在侧壁1412之间和在底部支撑件1420上方延伸)。升降机吊笼1400具有在侧壁1412之间延伸的顶部支撑件1430。顶部支撑件1430与一根或更多根缆绳或带状物(例如,钢带)1520联接,电动机-发电机1500经由安装件1510与升降机竖井1130联接。
64.一旦小车1200将块体1300定位在底部支撑件1420上方,可以致动支撑活塞1220,以使块体1300下降到底部支撑件1420上。在一种实施方式中,小车1200随后可以离开升降机吊笼1400,从而允许升降机吊笼1400沿着升降机竖井1300竖直移动块体1300。在另一种实施方式中,小车1200仍然处于升降机吊笼1400中,并且升降机吊笼1400沿着升降机竖井1300移动到另一排或另一层1140,以输送块体1300,其中小车1200可以使块体1300上升到底部支撑件1420上方,并且与其上的块体1300一起离开升降机吊笼1400到达排1140上。一旦块体1300移动到期望的位置,小车1200可以缩回支撑活塞1220,使得块体1300支撑在横梁1180上,并且小车1200可以从块体1300的下方移动并且远离该块体移动(见图10-11)。
65.图13-19示出了使块体1300沿着能量储存系统1000的框架或塔架1100的一排或一层1140移动并且将块体1300转移到升降机吊笼1400’以经由升降机竖井1130移动块体1300(例如,移动到框架或塔架1100中的另一海拔)的步骤顺序。图13-19中相同顺序的步骤可以反向执行,以将块体1300下降到一排1140上,从而将块体1300从升降机竖井1130中的升降机吊笼1400’转移到一排或一层1140上。本领域的技术人员将认识到,可以将图13-19中示出的以及下文描述的步骤顺序实施到能量储存和输送系统1000、图7中的能量储存和输送系统1000’以及图8中的能量储存和输送系统1000”的任一排(例如,上部区段1102和/或下部区段1104的所有排)中,使得下面的描述适用于图5-8中的系统1000、1000’、1000”。
66.图13示出了框架或塔架1100的一排1140的一部分,如上所述,块体1300设置在小车1200上(例如,支撑活塞1220将块体1300提升离开横梁1180)。可致动导轨部分(例如悬臂接头、蝶形接头)1184、1186设置在横梁1180的端部处,例如靠近升降机吊笼1400’沿其移动的升降机竖井1130。可致动导轨部分1184、1186可以在缩回位置(例如,图13、19所示)和伸出位置(例如,图14-18所示)之间移动,在缩回位置,导轨部分1184、1186横向(例如,垂直)于横梁1180延伸,在伸出位置,导轨部分1184、1186与横梁1180共线延伸。在一种实施方式中,在缩回位置,导轨部分1184、1186不延伸到升降机竖井1130中,而在伸出位置,导轨部分1184、1186延伸到升降机竖井1130中。通过电气、气动或液压方式,导轨部分1184、1186可以在缩回和伸出位置之间致动。
67.升降机吊笼1400’具有框架1410’,该框架具有面向排或层的开放底部和开放(前)侧。在一种实施方式中,框架1410’具有后部支撑件1411’,当升降机吊笼1400’与块体1300对齐和/或联接时,该后部支撑件可以位于块体1300的表面附近,并且框架具有一个或更多个侧臂1412’,该侧臂从后部支撑件1411’延伸,并且当升降机吊笼1400’与块体1300对齐和/或联接时,可以延伸到块体1300的侧面附近(见图16-18)。后部支撑件1411’具有的面积可以与块体1300的面大致相同。升降机吊笼1400’可以具有一个或更多个(例如一对)可致动支撑件1420’。可致动支撑件1420’可以在缩回位置(见图13-16)和伸出位置(见图17-19)
之间致动,在缩回位置,可致动支撑件与后部支撑件1411’共面或平行,在伸出位置,可致动支撑件通常横向于后部支撑件1411’的平面延伸。在伸出位置(见图17-19),可致动支撑件1420’可以位于块体1300的底部下方(例如,类似于叉车中货叉的定向),并且当升降机吊笼1400’沿着升降机竖井1130竖直移动时,可致动支撑件可以支撑块体1300。通过电气、气动或液压方式,可致动支撑件1420可以在缩回和伸出位置之间致动。升降机吊笼1400’具有近侧横梁1430’,经由该近侧横梁通过马达-发电机1500提升和降低升降机吊笼1400’(例如,通过与近侧横梁1430联接的缆绳或钢带,例如围绕该近侧横梁缠绕的缆绳或钢带)。在所示的实施方式中,升降机吊笼1400’的大小适于在框架或塔架1100的上部区段1102和下部区段1104之间一次运载一个块体1300。在下文进一步讨论的其他实施方式中,升降机吊笼1400’的大小可以适于在框架或塔架1100的上部区段1102和下部区段1104之间一次运载一个以上的块体1300(例如,两个、三个、四个)。
68.图13示出了小车1200上的块体1300正在朝向升降机竖井1130移动。导轨部分1184、1186处于缩回位置(例如,横向于横梁1180),这允许升降机吊笼1400’穿过升降机竖井1130(例如,在将块体1300输送到另一层1140之后,不会受到导轨部分1184、1186的干扰)。升降机吊笼1400’处于比层1140更高的竖直位置(例如,处于竖直偏离层1140的位置),并且其可致动支撑件1420’处于缩回位置(例如,与后部支撑件1411’共面或平行)。
69.图14示出了被致动到伸出位置的导轨部分1184、1186(例如,与横梁1180共线)。升降机吊笼1400’仍然处于比层1140更高的竖直位置(例如,处于竖直偏离层1140的位置),并且其可致动支撑件1420’处于缩回位置(例如,与后部支撑件1411’共面或平行)。
70.图15示出了小车1200沿着横梁1180移动了块体1300,并且将该块体移动到处于伸出位置的导轨部分1184、1186(悬臂导轨部分)上。小车1200可以致动支撑活塞1220,以使块体1300下降到导轨部分1184、1186上。升降机吊笼1400’仍然处于比层1140更高的竖直位置(例如,处于竖直偏离层1140的位置),并且其可致动支撑件1420’处于缩回位置(例如,与后部支撑件1411’共面或平行)。
71.图16示出了小车1200已经远离块体1300移动,该块体保持支撑在处于伸出位置的导轨部分1184、1186上。升降机吊笼1400’下降到块体1300上,使得框架1410’的后部支撑件1411’邻近块体1300的面对表面,并且框架1410’的侧臂1412’邻近块体1300的侧面,该侧面横向(例如垂直)于块体1300的面对表面。升降机吊笼1400’可以下降,使得可致动支撑件1420’位于块体1300底部的竖直下方的位置,其中可致动支撑件1420’处于缩回位置(例如,与后部支撑件1411’共面或平行)。
72.图17示出了可致动支撑件1420’移动到伸出位置(例如,横向于后部支撑件1411’的平面),使得其位于块体1300的表面下方(例如,类似于叉车的货叉)。然后,升降机吊笼1400’可以向上移动,从而导致(处于伸出位置的)可致动支撑件1420’接触块体1300的底部,并且将块体1300从导轨部分1184、1186提升。图18示出了升降机吊笼1400’带着块体1300向上移动,该块体的底部由可致动支撑件1420’(处于伸出位置)支撑,侧面由侧臂1412’支撑,并且面对表面由框架1410’的后部支撑件1411’支撑。图19示出了导轨部分1184、1186移动到缩回位置(例如,横向于横梁1180),使得导轨部分1184、1186不会突出到(例如,阻碍)升降机竖井1130中,从而允许带有块体1300的升降机吊笼1400’移动通过该升降机竖井,而不会受到导轨部分1184、1186的干扰。
73.图20是能量储存和输送系统或模块1000的示意性端视图,其示出了框架或塔架1100中的块体1300的布置以及块体1300在框架或塔架1100的上部区段1102的排1140和下部区段1104的排1140之间的移动,以储存能量或产生电力。本领域的技术人员将认识到,下面描述的过程可以在图7中的能量储存系统1000’和图8中的能量储存系统1000”中实施,因此下面的描述也适用于图7-8中的系统1000’、1000”。将压载重物或块体1300从上部区段1102中的排或层1140移动到下部区段1104中的相应排或层1140来产生电力(例如,经由马达-发电机1500),例如用于输送到电网或供中间区段1106使用(例如,为数据中心供电或为竖直耕作的照明供电)。将压载重物或块体1300从下部区段1104中的排或层1140移动到上部区段1102中的相应排或层1140,以将电能储存为块体1300的势能。
74.压载重物或块体1300可以设置在塔架或框架1100的上部区段1102的排1140中(例如,设置在排u1至u8中)。上部区段1102中每一排1140中的块体1300可以通过每一排u1-u8中的小车1200水平(在x方向上)移动到升降机竖井1130a、1130b,以通过其相关联的升降机吊笼1400、1400’竖直(在z方向上)下降到下部区段1104中的相应排1140(例如,排l1至l8)。输送到排l1至l8的块体1300通过排l1-l8的每一排中的小车1200水平移动。升降机吊笼1400、1400’可以使块体1300经由排1140端部处的升降机竖井1130a、1130b下降,例如经由上文结合图9和图13-19描述的移动顺序。升降机吊笼1400、1400’以及排1130端部处的固定的升降机竖井1130a、1130b提供了块体1300在上部区段1102和下部区段1104之间的高效、快速和有导向的移动。在能量储存和输送系统1000的运行期间,升降机吊笼1400、1400’在右升降机竖井1130a中的运动与升降机吊笼1400、1400’在左升降机竖井1130b中的运动交错,如下所述。尽管图20中的系统1000示出了上部区段1102中的八排u1-u8和下部区段1104中的八排l1-l8,它们支撑块体1300,但是本领域的技术人员将认识到,排1140的数量可以变化,并且无论上部区段1102和下部区段1104中的排1140的总数是多少,本文描述的用于将块体1300从上部区段1102中的排1140移动到下部区段1104中的相应排1140的相同过程以及块体1300的分布方式都是适用的。
75.参考图20,从上部区段1102的一排1140中移除的每个块体1300有利地被下部区段1104中的另一块体1300替换,使得框架或塔架1100的平均地基载荷和/或地面(例如地基)上的平均载荷分布保持基本恒定(例如恒定)。在一种实施方式中,从上部区段1102的排1140中移除的每个块体有利地被位于相同列1120位置的下部区段1104的排1140中的另一块体1300替换,使得所述列1120中的载荷保持不变。例如,在上部区段1102具有填充有块体1300的八排u1-u8并且下部区段1104具有块体1300可以从上部区段1102移动到其的八排l1-l8的情况下,在任一列1120中都存在八个块体1300。在系统1000的运行期间,每个列1120维持相同数量的块体1300(例如,八个块体),从而有利地使框架或塔架1100维持在平衡载荷下(例如,每个列1120维持基本相同的载荷)。因此,在系统1000的运行期间,框架或塔架1100的地基(或地面)上的载荷不会发生变化,因此,通过块体1300在上部区段1102的排或层1140与下部区段1104的排或层1140之间的移动,地基有利地不会(例如,周期性地)受到应力或经历差异沉降。
76.继续参考图20,可以将上部区段1102的排u1中的块体1300下降到下部区段1104的排l1中,以产生电力。类似地,可以将排u2中的块体1300下降到排l2,可以将排u3中的块体1300下降到排l3,可以将排u4中的块体1300下降到排l4,可以将排u5中的块体1300下降到
排l5,可以将排u6中的块体1300下降到排l6,可以将排u7中的块体1300下降到排l7,可以将排u8中的块体1300下降到排l8。上部区段1102的任一排1140中的块体行进相同的竖直距离到达下部区段1104中的相应排1140,使得每个块体1300经历相同的竖直跳跃。如图20所示,排1140的子集(例如,排u1、u3、u5和u7)中的块体1300经由一个升降机竖井1130a下降,而其余的排1140(例如,排u2、u4、u6和u8)经由另一个升降机竖井1130b下降。如上所述,中间区段1106保持没有块体的状态,并且可以用于其他目的。
77.可以经由升降机竖井1130a、1130b使块体1300在上部区段1102和下部区段1104之间同时移动。例如,可以经由升降机竖井1130a将块体1300从排u1下降到排l1,并且将其转移到小车1200(例如,以与上述图13-19相反的顺序),该小车可以使块体1300从取出块体1300的排u1上的位置朝向排l1的相对端水平移动。基本上同时,可以经由升降机竖井1130b将块体1300从排u2下降到排l2,并且将其转移到小车1200(例如,以与上述图13-19相反的顺序),该小车可以使块体1300从取出块体1300的排u2上的位置朝向排l2的相对端水平移动。如上所述,这有利地允许框架或塔架1100的平均地基载荷和/或地面(例如,地基)上的载荷平均分布保持基本恒定。
78.有利的是,升降机吊笼1400、1400’在框架或塔架1100的上部区段1102中的排u1-u8和下部区段1104中的排l1-l8之间快速移动(例如,因为用于使块体1300移动的动力成本随着升降机吊笼1400、1400’移动块体1300的速度而下降)。因为升降机吊笼1400、1400’比小车1200移动得快得多,所以在一种实施方式中,升降机吊笼1400、1400’不会返回到上部区段1102中的同一排1140,直到该升降机吊笼将块体1300从上部区段1102中服务于相关联升降机竖井1130a、1130b的其余排1140移动到其在下部区段1104中的相应排1140。
79.图20a-20d示出了经由升降机竖井1130a、1130b(例如,利用升降机吊笼1400、1400’)将块体1300从上部区段1102移动到下部区段1104以产生电力的过程。如图20b所示,经由升降机竖井1130a将块体a1从排u1的一端移动到排l1,并且将其移动到排l1的相对端。类似地,经由升降机竖井1130b将块体b1从排u2的一端移动到排l2,并且将其移动到排l2的相对端。一旦如上所述将块体a1输送到了排l1,升降机竖井1130a中的升降机吊笼返回到上部区段1102中的下一排u3,并且经由升降机竖井1130a将块体c1移动到其在下部区段1104中的相应排l3,并且将块体c1移动到排l3的相对端。类似地,一旦如上所述将块体b1输送到了排l2,升降机竖井1130b中的升降机吊笼返回到上部区段1102中的下一排u4,并且经由升降机竖井1130b将块体d1移动到其在下部区段1104中的相应排l4,并且将块体d1移动到排l4的相对端。对于上部区段102中的其余排(例如,对于图20中的排u5至u8),该过程可以以这种方式继续。继续参考图20b,一旦将块体1300从上部区段102中的每一排(例如,u1-u4)下降到了其在下部区段104中的相应排(例如,l1-l4),相应升降机竖井1130a、1130b中的升降机吊笼1400、1400’再次执行上述相同步骤,以将上部区段102中的排(u1-u4)中的下一块体(例如,a2-d2)移动到其在下部区段中的相应排(l1-l4),如图20c所示。类似地,一旦将第二块体1300从上部区段102中的每一排(例如,u1-u4)下降到了其在下部区段104中的相应排(例如,l1-l4),相应升降机竖井1130a、1130b中的升降机吊笼1400、1400’再次执行上述相同步骤,以将上部区段102中的排(u1-u4)中的下一块体(例如,a3-d3)移动到其在下部区段中的相应排(l1-l4),如图20d所示,以此类推。因为升降机吊笼1400、1400’沿着升降机竖井1130a、1130b竖直行进的速度比(多个)小车1200沿着排1140(例如,u1-u4和/或l1-l4)水
平行进的速度快得多,所以上述顺序有利地给予小车1200足够的时间以使其沿着排1140行进,以便在升降机吊笼1400、1400’行进到同一排时拾取另一块体1300并且将其移动到升降机竖井1130a、1130b附近,从而允许系统1000高效运行。上述过程有利地允许框架或塔架1100的地基上的载荷(例如,平均载荷)和/或地面(例如,地基)上的载荷分布(例如,平均载荷)保持基本恒定。
80.在一种实施方式中,一次移动一个块体1300(例如,使用上文结合图9-19描述的托架1400、1400’)。在另一种实施方式中,托架或升降机可以一次移动多个块体1300,如图21-22b所示。
81.图21示出了在框架、塔架或模块1100的升降机竖井1130a内行进的升降机吊笼1400a的实施方式的示意图。升降机吊笼1400a类似于图9所示和上文所述的升降机吊笼1400。因此,用于表示升降机吊笼1400a的各种部件的附图标记与用于标识图9中的升降机吊笼1400的相应部件的附图标记相同,除了在数字标识符的末尾添加了“a”。因此,图9中的升降机吊笼1400的各种特征的结构和描述应理解为也适用于图21中的升降机吊笼1400a的相应特征,以下描述除外。在一种实施方式中,可以操作升降机吊笼1400a,以移动块体1300,如上文结合图20所述。
82.升降机吊笼1400a与升降机吊笼1400的不同之处在于,其更长(例如,30米长)并且可以一次运送多个块体1300,而升降机吊笼1400一次仅可以运送一个块体1300。可选地,升降机吊笼1400a具有的长度允许其同时与框架或塔架或模块1100的上部区段1102中的所有排1140对齐,或同时与框架或塔架或模块1100的下部区段104中的所有排1140对齐。
83.升降机吊笼1400a具有多个导轨部分1484a、1486a,该多个导轨部分沿着升降机吊笼1400a在不同竖直位置处间隔开,该多个导轨部分与框架或塔架或模块1100的多个层1140的横梁1180的端部对齐。例如,参考图20,在上部区段1102具有层u1至u8的情况下,升降机吊笼1400a的导轨部分1484a、1486a可以同时与层u1至u8对齐。类似地,当升降机吊笼1400a移动到框架或塔架或模块1100的底部时,导轨部分1484a、1486a可以同时与下部区段1104中的层l1至l8对齐。本领域的技术人员将认识到,可以在另一个升降机吊笼1130b中设置类似的升降机吊笼1400a,其与上部区段1102中的所有排或层1140同时对齐,或与下部区段1104中的所有排或层1140同时对齐,其中可以将来自排u2、u4、u6和/或u8的块体1300移动到排l2、l4、l6和/或l8。
84.参考图21,升降机吊笼1400a可以一次运载一个以上的块体1300(例如,运载两个块体,比如从排u1和u3到排l1和l3;运载三个块体,比如从排u1、u3和u5到排l1、l3和l5;运载四个块体,比如从排u1、u3、u5和u7到排l1、l3、l5和l7,等等)。在另一种实施方式中,升降机吊笼1400a可以一次运载一个块体1300(例如,执行与上文结合图20描述的移动块体1300相同的过程)。有利的是,升降机吊笼1400a与各排或层1140的横梁1180对齐所需的控制较少,这是因为沿着升降机竖井1130a的升降机吊笼1400a只需要两个止动件就可以使升降机吊笼1400a与运送块体1300的所有排1140对齐,一个止动件位于框架或塔架或模块1100的顶部处,在此处升降机吊笼1400a与上部区段1102中的各排1140同时对齐,并且还有一个止动件位于框架或塔架或模块1100的底部处,在此处升降机吊笼1400a与下部区段1104中的各排1140对齐。
85.在另一种实施方式中,升降机吊笼1400a具有的长度允许其同时与框架或塔架或
模块1100的上部区段1102或下部区段104中的少于所有排1140对齐(例如,长度通常与两个排1140的高度一致、长度通常与三个排1140的高度一致、长度通常与四个排1140的高度一致,等等)。
86.图22a-22b示出了在框架、塔架或模块1100的升降机竖井1130a内行进的升降机吊笼1400a’的实施方式的示意图。升降机吊笼1400a’类似于图13-19所示和上文所述的升降机吊笼1400’。因此,用于表示升降机吊笼1400a’的各种部件的附图标记与用于标识图13-19中的升降机吊笼1400’的相应部件的附图标记相同,除了给数字标识符添加了“a”。因此,图13-19中的升降机吊笼1400’的各种特征的结构和描述应理解为也适用于图22b-22b中的升降机吊笼1400a’的相应特征,以下描述除外。在一种实施方式中,可以操作升降机吊笼1400a’,以移动块体1300,如上文结合图20所述。
87.升降机吊笼1400a’与升降机吊笼1400’的不同之处在于,其更长(例如,30米长)并且可以一次运送多个块体1300,而升降机吊笼1400’一次仅可以运送一个块体1300。可选地,升降机吊笼1400a’具有的长度允许其同时与上部区段1102中的所有排1140对齐,或同时与框架或塔架或模块1100的下部区段104中的所有排1140对齐。
88.升降机吊笼1400a’具有多个可致动支撑件1420a’,该多个可致动支撑件沿着升降机吊笼1400a’在不同竖直位置处间隔开,以允许将块体1300从一个或更多个此类排1140转移到升降机吊笼1400a’。图22a示出了层1140的横梁1180的端部处的可致动导轨部分1184、1186处于缩回位置(例如,使得它们不会突出到升降机竖井1130a中),比如当升降机吊笼1400a’移动经过这些层1140时。图22b示出了一个或更多个层1140的横梁1180的端部处的可致动导轨部分1184、1186处于伸出位置(例如,使得它们延伸到升降机竖井1130a中),以允许将所述排1140中的块体1300转移到升降机吊笼1400a’。
89.例如,参考图20,在上部区段1102具有层u1至u8的情况下,升降机吊笼1400a’可以同时与层u1至u8对齐。类似地,当升降机吊笼1400a’移动到框架或塔架或模块1100的底部时,升降机吊笼1400a’可以同时与下部区段1104中的层l1至l8对齐。本领域的技术人员将认识到,可以在另一个升降机吊笼1130b中设置类似的升降机吊笼1400a’,其与上部区段1102中的所有排或层1140同时对齐,或与下部区段1104中的所有排或层1140同时对齐,其中可以将来自排u2、u4、u6和/或u8的块体1300移动到排l2、l4、l6和/或l8。
90.参考图22a-22b,升降机吊笼1400a’可以一次运载一个以上的块体1300(例如,运载两个块体,比如从排u1和u3到排l1和l3;运载三个块体,比如从排u1、u3和u5到排l1、l3和l5;运载四个块体,比如从排u1、u3、u5和u7到排l1、l3、l5和l7,等等)。在另一种实施方式中,升降机吊笼1400a’可以一次运载一个块体1300(例如,执行与上文结合图20描述的移动块体1300相同的过程)。有利的是,升降机吊笼1400a与各排或各层1140的横梁1180对齐所需的控制较少,这是因为升降机吊笼1400a’在升降机竖井1130a中的移动只需要两个止动件就可以使升降机吊笼1400a’与运送块体1300的所有排1140对齐,一个止动件位于框架或塔架或模块1100的顶部处,在此处升降机吊笼1400a’与上部区段1102中的各排1140同时对齐,并且还有一个止动件位于框架或塔架或模块1100的底部处,在此处升降机吊笼1400a’与下部区段1104中的各排1140对齐。
91.在另一种实施方式中,升降机吊笼1400a’具有的长度允许其同时与框架或塔架或模块1100的上部区段1102或下部区段104中的少于所有排1140对齐(例如,长度通常与两个
排1140的高度一致、长度通常与三个排1140的高度一致、长度通常与四个排1140的高度一致,等等)。
92.可选地,块体130、1300的重量可以在大致20吨到50吨之间,比如大致30吨(例如30公吨)。然而,在其他示例中,块体130、1300的重量可以是其他合适的量。
93.块体130、1300可以包括压载块(例如承重填充材料),例如封装在壳体中。在一个示例中,压载块的材料不同于壳体的材料。例如,如下所述,压载块或承重填充材料可以是土壤、煤、飞灰、碎屑、拆除材料、砾石、建筑垃圾和/或与低级或廉价混凝土混合和/或压制的回收材料。这有利地减少了制造块体130、1300的成本,并且提供了用于分配材料(例如,拆除材料、建筑垃圾、碎屑等)的机构,否则这些材料将被送到填埋场。在另一示例中,压载块和壳体采用相同的材料(例如,限定没有任何边界或接缝的整体或单一块)。有利的是,块体130、1300可以利用系统1000、1000’、1000”位置附近可用的材料制造。可选地,可以加强(例如,用钢)块体130、1300,比如利用一个或更多个钢网或钢筋(例如,结构钢)的加强层。
94.可选地,块体130、1300可以至少部分由混凝土制成(例如,块体130、1300的壳体可以由混凝土制成)。有利的是,因为混凝土具有比水更高的密度,所以与相应体积的水相比,块体130、1300的体积可以储存更多的势能。在一个示例中,至少一部分块体130、1300可以由低等级的混凝土(例如,其具有的抗压强度低于10mpa,比如3-8mpa)制成。
95.能量储存和输送系统100、1000、1000’、1000”可操作,以通过将块体130、1300从较低海拔提升(例如,竖直提升)到较高海拔,从而将电能或电力转换成储存的势能,并且经由重力将一个或更多个块体130、1300从较高海拔移动(例如,竖直移动、竖直下降)到较低海拔,从而将势能转换成电能或电力。
96.电动机-发电机1500可以操作升降机吊笼1400、1400’、1400a、1400a’,以将一个或更多个块体130、1300从较低海拔提升(例如竖直提升),并且将块体130、1300放置在较高海拔处。较高海拔处的每个块体130、1300储存一定量的势能,该势能与块体130、1300在较低海拔和较高海拔之间的质量和高度差相对应(例如,成比例)(例如,势能=质量x重力x基准面,比如地面上方的高度)。块体130、1300越重,并且块体上升得越高,可以储存的势能就越多。
97.为了将储存的势能转换成电力,升降机吊笼1400、1400’、1400a、1400a’可以将一个或更多个块体130、1300从较高海拔移动到较低海拔(例如,至少部分在重力作用下竖直下降),以驱动电动机-发电机1500(经由一根或更多根缆绳或钢带)来产生电力,可以将该电力输送到与电动机-发电机1500电连接的电网。每次使块体130、1300下降时,就会产生电力形式的动力。
98.有利的是,例如,能量储存和输送系统100、1000、1000’、1000”可以在太阳能动力可用时的白天时段期间将太阳能动力产生的电力作为势能储存在升高的块体130、1300中,并且可以在太阳能能源不可用的夜间时段期间通过使一个或更多个块体130、1300下降而将块体130、1300中的势能转换成电力,并且将转换的电力输送到电网。
99.本文描述的是能量储存和输送系统(例如,能量储存和输送系统100、1000、1000’、1000”)的示例,该系统可操作,以将电能或电力转换成用于储存的势能,并且将势能转换成例如用于输送至电网的电能或电力。有利的是,能量储存系统几乎不需要维护,并且可以运行数十年(例如,30-50年),而能量储存容量基本上不会减少。
100.在一些实施方式中,本文所述的能量储存系统可以储存大致10兆瓦时(mwh)或更多的能量(例如,在10mwh和100mwh之间,比如15mwh、20mwh、30mwh、50mwh、80mwh、90mwh),并且向电网输送大致10mwh或更多的能量(例如,在10mwh和100mwh之间,比如15mwh、20mwh、30mwh、50mwh、80mwh、90mwh)。本文所述的能量储存系统可以每小时输送能量(例如,1mw到6mw或更高)。然而,在其他实施方式中,本文所述的能量储存和输送系统可以具有其他合适的能量储存和输送容量(例如,1mwh、3mwh、5mwh等)。在一种实施方式中,可选地,能量储存和输送系统可以为大致1000个家庭或更多家庭供电一天。
101.有利的是,本文所述的能量储存和输送系统可以连接到可再生能源(例如绿色能源)发电系统,例如,太阳能动力能源系统、风能动力系统(例如风力涡轮机)等。有利的是,在可再生能源发电系统运行期间(例如,太阳能能源系统在白天时段期间运行,风能动力系统在有风条件下运行),能量储存和输送系统捕获可再生能源发电系统产生的电力。当可再生能源发电系统不可操作时(例如,在夜间、在无风条件下),能量储存和输送系统可以稍后将储存的电力输送到电网。因此,能量储存和输送系统像用于可再生能源发电系统的电池一样运行,并且可以从可再生能源发电系统向电网输送非工作时间的电力。
102.在上述实施方式中,能量储存和输送系统100、1000、1000’、1000”提升块体130、1300,以将电能储存为势能,并且使块体130、1300下降,以产生电力。在一种实施方式中,可以利用电网的多余电力来运行升降机吊笼1400、1400’、1400a、1400a’。对于用于提升块体130、1300的每单位能量,由能量储存系统100、1000、1000’、1000”回收的能量的量可以可选地为80-90%。
103.附加实施例
104.在本发明的实施例中,能量储存系统和操作该能量储存系统的方法以及在该能量储存系统中使用的升降机吊笼可以符合以下条款中的任一条款:
105.条款1:一种能量储存和输送系统,包括:
106.一个或更多个模块,每个模块包括
107.多个块体,以及
108.框架,该框架在由水平延伸的多个排限定的地基上方具有竖直高度,所述框架包括
109.具有第一组排的上部区段,所述第一组排中的每一排被配置为在其上接收和支撑多个块体,
110.具有第二组排的下部区段,所述第二组排中的每一排被配置为在其上接收和支撑多个块体,
111.在所述上部区段和所述下部区段之间的中间区段,该中间区段中没有块体,
112.升降机竖井对,其设置在所述多个排的相对端上,以及升降机吊笼,该升降机吊笼可移动地设置在所述升降机竖井对的每一个升降机竖井中,并且可操作地联接到电动机-发电机上,所述升降机吊笼的大小适于在其中接收和支撑一个或更多个块体,
113.其中,所述升降机竖井对的每一个升降机竖井中的升降机吊笼可操作,以将一个或更多个块体从所述第二组排的交替排移动到所述第一组排的相应交替排,从而储存与所述块体的势能量相对应的电能量,并且所述升降机竖井对的每一个升降机竖井中的升降机吊笼可操作,以在重力作用下将一个或更多个块体从所述第一组排的交替排移动到所述第
二组排的相应交替排,从而产生一定量的电力,所述升降机吊笼沿着相同的竖直距离在第二组排中的每一排和相应的第一组排中的每一排之间移动所述块体。
114.条款2:根据条款1所述的系统,其中,所述中间区段被配置为容纳一个或更多个竖直耕作单元。
115.条款3:根据任一前述条款所述的系统,其中,所述升降机竖井对的每一个升降机竖井中的升降机吊笼可操作,以使所述块体在所述第一组排和所述第二组排之间移动,使得所述模块的地基上的平均载荷分布保持基本恒定。
116.条款4:根据任一前述条款所述的系统,其中,所述框架包括由一个或更多个支柱限定的多个列,所述支柱在其上支撑横梁,每个横梁对限定第一组排和第二组排中的一排,该排正交于所述列延伸,所述横梁被配置为在其顶面上支撑块体,每个横梁在所述顶面下方具有纵向通道。
117.条款5:根据条款4所述的系统,进一步包括多个横向构件,所述横向构件在所述列之间延伸并且沿着所述排的长度在所述列之间提供对角斜撑。
118.条款6:根据条款4所述的系统,其中,所述第一组排和所述第二组排中的一个组排或两个组排中的每一排包括可移动地联接在限定所述排的横梁对之间的小车,所述小车被配置为在限定所述排的横梁对的通道之间延伸并且在设置在限定所述排的横梁对上的块体下方行进,所述小车可操作,以将块体提升到所述横梁对上方并且使所述块体沿着所述排水平移动。
119.条款7:根据条款6所述的系统,其中,所述小车包括在所述横梁对的通道内延伸的轮子组件、在所述横梁对之间延伸的框架、以及支撑活塞,该支撑活塞可操作,以将所述块体提升到所述横梁对上方以用于使所述块体沿着所述排水平移动,并且所述支撑活塞可操作,以将所述块体下降到所述横梁对上,以固定所述块体在所述排上的位置。
120.条款8:根据条款6所述的系统,其中,所述升降机吊笼包括导轨部分对,所述导轨部分对被配置为与一个排的横梁对对齐,使得所述小车从所述横梁对行进到所述导轨部分对,以将所述块体输送到所述升降机吊笼。
121.条款9:根据条款8所述的系统,其中,小车将所述块体输送到所述导轨部分对的顶面上,并且在所述升降机吊笼沿着所述升降机竖井移动块体之前离开所述升降机吊笼。
122.条款10:根据条款6所述的系统,进一步包括可致动导轨部分,所述可致动导轨部分可移动地联接到所述横梁的靠近所述升降机竖井的端部,所述导轨部分能够在缩回位置和伸出位置之间致动,在所述缩回位置,所述导轨部分正交于所述横梁延伸,在所述伸出位置,所述导轨部分与所述横梁共线延伸并且延伸到所述升降机竖井的空间中,其中,在所述伸出位置,所述导轨部分能够在其间接收所述小车,以用于将块体定位在所述导轨部分的表面上,从而将所述块体转移到所述升降机吊笼。
123.条款11:根据条款10所述的系统,其中,所述升降机吊笼包括框架,该框架限定后部支撑件、从所述后部支撑件延伸的侧臂、以及一个或更多个可致动支撑件,所述一个或更多个可致动支撑件能够在缩回位置和伸出位置之间致动,所述缩回位置与所述后部支撑件的平面基本对齐,所述伸出位置横向于所述后部支撑件的平面,所述一个或更多个可致动支撑件在处于所述伸出位置时被配置为将所述块体从所述可致动导轨部分提升并且在所述升降机吊笼在所述升降机竖井中运动期间在其上支撑块体。
124.条款12:根据条款11所述的系统,其中,所述一个或更多个可致动支撑件是可致动支撑件对,其在所述伸出位置横向于所述后部支撑件延伸并且被配置为,在所述升降机吊笼在所述升降机竖井中运动期间在其上支撑块体。
125.条款13:根据任一前述条款所述的系统,其中,所述一个或更多个模块是在平面图中呈方形布置的四个模块,使得每个模块的排正交于相邻模块的排延伸,从而为所述四个模块提供抵抗风力和地震力的自动斜撑。
126.条款14:根据任一前述条款所述的系统,其中,所述一个或更多个模块是共线布置的两个模块,使得每个模块的排基本对齐。
127.条款15:一种能量储存和输送系统,包括:
128.多个块体,以及
129.框架,该框架在由水平延伸的多个排限定的地基上方具有竖直高度,所述框架包括:
130.具有第一组排的上部区段,所述第一组排中的每一排被配置为在其上接收和支撑多个块体,
131.具有第二组排的下部区段,所述第二组排中的每一排被配置为在其上接收和支撑多个块体,
132.在所述上部区段和所述下部区段之间的中间区段,该中间区段中没有块体,
133.升降机竖井对,其设置在所述多个排的相对端上;
134.小车,该小车可移动地联接到所述第一组排和所述第二组排中的一个组排或两个组排中的每一排,所述小车可操作,以在所述排中的块体下方行进,并且所述小车被配置为提升块体,以使所述块体沿着所述排水平移动;以及
135.升降机吊笼,该升降机吊笼可移动地设置在所述升降机竖井对的每一个升降机竖井中并且可操作地联接到电动机-发电机上,所述升降机吊笼的大小适于经由所述小车从一个排上接收块体并且在沿着所述升降机竖井移动时在其中支撑块体,
136.其中,所述升降机竖井对的每一个升降机竖井中的升降机吊笼可操作,以将一个或更多个块体从所述第二组排的交替排移动到所述第一组排的相应交替排,从而储存与所述块体的势能量相对应的电能量,并且所述升降机竖井对的每一个升降机竖井中的升降机吊笼可操作,以在重力作用下将所述块体中的一个或更多个从所述第一组排的交替排移动到所述第二组排的相应交替排,从而产生一定量的电力,所述升降机吊笼沿着相同的竖直距离在第二组排中的每一排和相应第一组排中的每一排之间移动所述块体。
137.条款16:根据条款15所述的系统,其中,所述中间区段被配置为容纳一个或更多个竖直耕作单元。
138.条款17:根据条款15-16之一所述的系统,其中,所述升降机竖井对的每一个升降机竖井中的升降机吊笼可操作,以使所述块体在所述第一组排和所述第二组排之间移动,使得所述模块的地基上的平均载荷分布保持基本恒定。
139.条款18:根据条款15-17之一所述的系统,其中,所述第一组排和所述第二组排中的一个组排或两个组排中的每一排由横梁对限定,所述小车可移动地联接在所述横梁对之间。
140.条款19:根据条款18所述的系统,其中,所述升降机吊笼包括导轨部分对,所述导
轨部分对被配置为与一个排的横梁对对齐,使得所述小车从所述横梁对行进到所述导轨部分对,以将所述块体输送到所述升降机吊笼,从而沿着所述升降机竖井移动。
141.条款20:根据条款18所述的系统,进一步包括可致动导轨部分,所述可致动导轨部分可移动地联接到所述横梁的靠近所述升降机竖井的端部,所述导轨部分能够在缩回位置和伸出位置之间致动,在所述缩回位置,所述导轨部分正交于所述横梁延伸,在所述伸出位置,所述导轨部分与所述横梁共线延伸并且延伸到所述升降机竖井的空间中,其中,在所述伸出位置,所述导轨部分能够在其间接收所述小车,以用于将块体定位在所述导轨部分的表面上,从而将所述块体转移到所述升降机吊笼。
142.条款21:根据条款20所述的系统,其中,所述升降机吊笼包括框架,该框架限定后部支撑件、从所述后部支撑件延伸的侧臂、以及可致动支撑件对,所述可致动支撑件对能够在缩回位置和伸出位置之间致动,所述缩回位置与所述后部支撑件的平面基本对齐,所述伸出位置横向于所述后部支撑件的平面,所述可致动支撑件对在处于所述伸出位置时被配置为将块体从所述可致动导轨部分提升并且在所述升降机吊笼在所述升降机竖井中运动期间在其上支撑块体。
143.条款22:一种用于经由根据任一前述条款所述的能量储存和输送系统储存和产生电力的方法,包括:
144.在框架的多个排的相对端上操作升降机吊笼对,以在所述框架的上部区段的第一组排和所述框架的下部区段的相应第二组排之间移动多个块体,所述框架的下部区段的相应第二组排设置在所述框架的中间区段的下方,所述中间区段中没有块体,
145.其中,操作所述升降机吊笼对包括:
146.利用所述升降机吊笼对将一个或更多个块体从所述第二组排的交替排移动到所述第一组排的相应交替排,以储存与所述块体的势能量相对应的电能量;以及
147.在重力作用下,利用所述升降机吊笼对将一个或更多个块体从所述第一组排的交替排移动到所述第二组排的相应交替排,以经由与所述升降机吊笼电联接的电动机-发电机产生一定量的电力,所述升降机吊笼使所述块体在第二组排的每一排和相应的第一组排的每一排之间移动相等的竖直距离。
148.条款23:根据条款22所述的方法,其中,将所述一个或更多个块体从所述第二组排的交替排移动到所述第一组排的相应交替排,或将所述一个或更多个块体从所述第一组排的交替排移动到所述第二组排的相应交替排包括:定位所述块体,使得所述框架的地基上的平均载荷分布保持基本恒定。
149.条款24:根据条款22-23中任一项所述的方法,其中,将所述一个或更多个块体从所述第二组排的交替排移动到所述第一组排的相应交替排包括:在返回到所述第二组排的交替排的第一交替排之前,将块体从所述第二组排的每个交替排按顺序移动到所述第一组排的相应交替排。
150.条款25:根据条款22-24中任一项所述的方法,其中,将所述一个或更多个块体从所述第一组排的交替排移动到所述第二组排的相应交替排包括:在返回到所述第一组排的交替排的第一交替排之前,将块体从所述第一组排的每个交替排按顺序移动到所述第二组排的相应交替排。
151.条款26:根据条款22-25中任一项所述的方法,其中,将所述一个或更多个块体从
所述第二组排的交替排移动到所述第一组排的相应交替排包括:将块体从所述第二组排的每个交替排同时移动到所述第一组排的相应交替排。
152.条款27:根据条款22-26中任一项所述的方法,其中,将所述一个或更多个块体从所述第一组排的交替排移动到所述第二组排的相应交替排包括:将块体从所述第一组排的每个交替排同时移动到所述第二组排的相应交替排。
153.条款28:根据条款22-27中任一项所述的方法,其中,将所述多个块体中的一个或更多个块体从所述第二组排的交替排移动到所述第一组排的相应交替排包括:利用小车使所述一个或更多个块体沿着所述第二组排的一个或更多个排水平移动,所述小车在所述块体下方行进并且选择性地将所述块体提升到所述排的横梁上方,以将所述一个或更多个块体输送到所述升降机吊笼。
154.条款29:根据条款28所述的方法,其中,利用所述小车将所述一个或更多个块体输送到所述升降机吊笼包括:将所述升降机吊笼的导轨部分与所述第二组排的一个或更多个排的横梁对齐,以允许所述小车行进到所述升降机吊笼上,从而将所述一个或更多个块体输送到所述导轨部分上。
155.条款30:根据条款28所述的方法,其中,利用所述小车将所述一个或更多个块体输送到所述升降机吊笼包括:致动与所述横梁的端部可移动联接的悬臂导轨部分,所述导轨部分能够在缩回位置和伸出位置之间致动,在所述缩回位置,所述导轨部分正交于所述横梁延伸,在所述伸出位置,所述导轨部分与所述横梁共线延伸,以允许所述小车从所述横梁行进到所述导轨部分。
156.条款31:根据条款30所述的方法,其中,利用所述小车将所述一个或更多个块体输送到所述升降机吊笼包括:将所述升降机吊笼与设置在所述悬臂导轨部分上的块体大致对齐,并且在所述块体底部的下方将所述升降机吊笼的支撑件致动到伸出位置中,从而允许所述升降机吊笼将所述块体提升离开所述悬臂导轨部分。
157.条款32:根据条款22-31中任一项所述的方法,其中,将所述多个块体中的一个或更多个从所述第一组排的交替排移动到所述第二组排的相应交替排包括:利用小车使所述一个或更多个块体沿着所述第二组排的一个或更多个排水平移动,所述小车在所述块体下方行进并且选择性地将所述块体提升到所述排的横梁上方,以将所述一个或更多个块体输送到所述升降机吊笼。
158.条款33:根据条款32所述的方法,其中,利用所述小车将所述一个或更多个块体输送到所述升降机吊笼包括:将所述升降机吊笼的导轨部分与所述第二组排的一个或更多个排的横梁对齐,以允许所述小车行进到所述升降机吊笼上,从而将所述一个或更多个块体输送到所述导轨部分上。
159.条款34:根据条款32所述的方法,其中,利用所述小车将所述一个或更多个块体输送到所述升降机吊笼包括:致动与所述横梁的端部可移动联接的悬臂导轨部分,这些导轨部分能够在缩回位置和伸出位置之间致动,在所述缩回位置,所述导轨部分与所述横梁正交延伸,在所述伸出位置,所述导轨部分与所述横梁共线延伸,以允许所述小车从所述横梁行进到所述导轨部分。
160.条款35:根据条款34所述的方法,其中,利用所述小车将所述一个或更多个块体输送到所述升降机吊笼包括:将所述升降机吊笼与设置在所述悬臂导轨部分上的块体大致对
齐,并且在所述块体底部的下方将所述升降机吊笼的支撑件致动到伸出位置中,从而允许所述升降机吊笼将所述块体提升离开所述悬臂导轨部分。
161.条款36:一种用于利用根据任一前述权利要求所述的能量储存和输送系统储存和产生电力的方法,包括:
162.利用小车使一个或更多个块体沿着框架的上部区段中的第一组排的交替排朝向所述排的相对端上的升降机吊笼水平移动;以及
163.操作所述升降机吊笼,以使所述一个或更多个块体在重力作用下竖直移动经过所述框架的中间区段到达所述框架的第二组排的相应交替排,从而经由与所述升降机吊笼电联接的电动机-发电机产生一定量的电力,所述升降机吊笼使所述块体在所述第一组排的交替排和所述第二组排的相应交替排的每个交替排之间移动相等的竖直距离。
164.条款37:根据条款36所述的方法,进一步包括:操作所述升降机吊笼,以使所述一个或更多个块体从所述第二组排的交替排竖直移动并经过所述框架的中间区段到达所述第一组排的相应交替排,从而储存与所述块体的势能量相对应的电能量。
165.条款38:根据条款37所述的方法,其中,将所述一个或更多个块体从所述第二组排的交替排移动到所述第一组排的相应交替排,或将所述一个或更多个块体从所述第一组排的交替排移动到所述第二组排的相应交替排包括:定位所述块体,使得所述框架的地基上的平均载荷分布保持基本恒定。
166.条款39:根据条款36-38中任一项所述的方法,其中,将所述一个或更多个块体从所述第一组排的交替排移动到所述第二组排的相应交替排包括:在返回到所述第一组排的交替排的第一交替排之前,将块体从所述第一组排的每个交替排按顺序移动到所述第二组排的相应交替排。
167.条款40:根据条款36-39中任一项所述的方法,其中,将所述一个或更多个块体从所述第一组排的交替排移动到所述第二组排的相应交替排包括:将块体从所述第一组排的每个交替排同时移动到所述第二组排的相应交替排。
168.条款41:根据条款36-40中任一项所述的方法,其中,利用所述小车使所述一个或更多个块体水平移动包括:将所述块体提升到所述排的横梁的上方。
169.条款42:一种能量储存和输送系统,包括:
170.多个块体;
171.框架,该框架在该框架的底端和该框架的顶端处的一个或更多个轨道之间延伸,所述框架在所述底端和所述顶端之间具有多个列,每个列被配置为经由附接至前支柱和后支柱的一个或更多个立柱在该列的不同竖直位置处在该列的前支柱和该列的后支柱之间可移动地支撑一组块体,所述一个或更多个立柱接合所述块体的相应立柱,使得一个列中的各块体保持彼此间隔开;
172.一个或更多个起重机,其可移动地安装到所述一个或更多个轨道上并且被配置为在一个或更多个列上沿着所述轨道水平行进;以及
173.与所述一个或更多个起重机电联接的电动机-发电机,
174.其中,所述一个或更多个起重机可操作,以与一个列中的块体中的一个或更多个块体联接,以便将所述一个或更多个块体从所述列的较低海拔处移动到所述列的较高海拔处,从而储存与所述一个或更多个块体的势能量相对应的电能量,并且在重力作用下将所
述一个或更多个块体从所述列的较高海拔处移动到所述列的较低海拔处,以经由所述电动机-发电机产生一定量的电力,其中,每个所述块体在所述较低海拔和所述较高海拔之间的竖直距离是相同的。
175.条款43:根据条款42所述的系统,进一步包括所述框架底部处的一个或更多个基脚。
176.条款44:根据条款42-43中任一项所述的系统,其中,附接至所述前支柱和所述后支柱的一个或更多个立柱能够在伸出位置和缩回位置之间致动,在所述伸出位置,所述一个或更多个立柱接合所述块体的立柱以将所述块体保持在所述列中的固定位置,在所述缩回位置,所述一个或更多个立柱与所述块体的立柱分离以允许所述起重机将所述块体竖直移动而不受所述支柱的立柱的干扰。
177.条款45:根据条款42-44中任一项所述的系统,其中,附接至所述前支柱和所述后支柱的一个或更多个立柱是固定的,所述起重机被配置为与所述列中的块体联接并且提升所述块体以使所述块体的立柱与所述支柱的立柱分离,所述起重机被配置为,使所述块体相对于所述支柱侧向移位,使得所述块体的立柱摆脱所述支柱的立柱;将所述块体竖直移位到所需位置;使所述块体沿着相反方向侧向移位以使所述块体的立柱与所述支柱的立柱对齐;并且使所述块体下降,从而使所述块体的立柱接合所述支柱的立柱。
178.条款46:根据条款42-45中任一项所述的系统,其中,所述块体是船运集装箱。
179.条款47:根据条款42-46中任一项所述的系统,其中,所述块仅竖直移动。
180.条款48:根据条款42-47中任一项所述的系统,进一步包括横向构件,所述横向构件使所述支柱互相连接,以为所述框架提供侧向稳定性。
181.条款49:根据条款48所述的系统,其中,所述横向构件是缆绳。
182.条款50:根据条款42-49中任一项所述的系统,其中,所述一个或更多个起重机经由抓取器机构与所述一个或更多个块体联接,所述抓取器机构经由一条或更多条缆绳可操作地联接到所述起重机。
183.条款51:根据条款42-50中任一项所述的系统,其中,所述一个或更多个起重机是可移动地联接到所述轨道的一对桥式起重机。
184.条款52:一种用于利用根据任一前述权利要求所述的能量储存和输送系统储存和产生电力的方法,包括:
185.操作可移动地安装到框架顶部处的一个或更多个轨道上的起重机,以使多个块体在所述框架的列的较低海拔和该列的较高海拔之间移动,每个块体在较低海拔和较高海拔之间的竖直距离是相同的,
186.其中,操作所述起重机包括:
187.将所述起重机与所述框架的一个列中的一个或更多个块体联接,并且将所述一个或更多个块体从该列的较低海拔处移动到该列的较高海拔处,以储存与所述一个或更多个块体的势能量相对应的电能量;以及
188.将所述起重机与所述框架的所述列中的一个或更多个块体联接,并且在重力作用下将所述一个或更多个块体从所述列的较高海拔处移动到所述列的较低海拔处,以经由与所述起重机电连接的电动机-发电机产生一定量的电力。
189.条款53:根据条款52所述的方法,其中,将所述一个或更多个块体从较低海拔移动
到较高海拔或者从较高海拔移动到较低海拔仅包括:使所述块体竖直移动。
190.条款54:根据条款52-53中任一项所述的方法,其中,将所述一个或更多个块体从较低海拔移动到较高海拔或者从较高海拔移动到较低海拔包括:将与所述列的支柱可移动联接的一个或更多个立柱缩回,以允许所述块体沿着所述列在竖直方向上不受阻碍地移动。
191.条款55:根据条款52-54中任一项的方法,其中,将所述一个或更多个块体从较低海拔移动到较高海拔或者从较高海拔移动到较低海拔包括:利用所述起重机提升所述一个或更多个块体,以使所述块体的立柱与所述列的立柱分离;使所述块体相对于所述列侧向移位,使得所述块体的立柱摆脱所述列的立柱;将所述块体竖直移位到所需位置;使所述块体沿着相反方向侧向移位,以使所述块体的立柱与所述列的立柱对齐;并且使所述块体下降,从而使所述块体的立柱接合所述支柱的立柱,以将所述块体固定支撑在所需位置。
192.条款56:根据条款52-55中任一项所述的方法,其中,将所述一个或更多个块体从较低海拔移动到较高海拔或者从较高海拔移动到较低海拔包括:在较低海拔和较高海拔之间一次移动一个块体。
193.条款57:根据条款52-56中任一项所述的方法,其中,将所述一个或更多个块体从较低海拔移动到较高海拔或者从较高海拔移动到较低海拔包括:在较低海拔和较高海拔之间一次移动多个块体,这些块体彼此间隔开。
194.条款58:根据条款52-57中任一项所述的方法,其中,所述块体是船运集装箱。
195.条款59:根据条款52-58中任一项的方法,其中,所述起重机是桥式起重机。
196.条款60:一种升降机吊笼,该升降机吊笼用于在根据任一前述权利要求所述的能量储存和输送系统中使用,以使块体在塔架的较低海拔和塔架的较高海拔之间移动来储存能量,并且以在重力作用下使块体在所述塔架的较高海拔和所述塔架的较低海拔之间移动来产生电力,所述升降机吊笼包括:
197.顶部支撑件;
198.侧部支撑件对,其附接至所述顶部支撑件并且横向于所述顶部支撑件延伸;
199.底部支撑件,该底部支撑件附接至所述并且横向于所述侧部支撑件对延伸,所述顶部支撑件、侧部支撑件对和底部支撑件限定与所述块体的形状大致对应的开口;以及
200.一个或更多个导轨部分对,其附接至所述侧部支撑件对并且横向于所述侧部支撑件延伸,所述一个或更多个导轨部分对中的每个导轨部分对被配置为与所述塔架中的一个排的横梁对对齐,以允许将块体从所述横梁对转移到所述导轨部分对。
201.条款61:根据条款60所述的升降机吊笼,其中,所述矩形开口是方形开口。
202.条款62:根据条款60-61中任一项所述的升降机吊笼,其中,所述顶部支撑件、底部支撑件和侧部支撑件对在升降机吊笼中限定前开口和后开口。
203.条款63:根据条款60-62中任一项所述的升降机吊笼,其中,所述底部支撑件包括一个或更多个轨道。
204.条款64:根据条款60-63中任一项所述的升降机吊笼,其中,每个侧部支撑件对包括一个或更多个轨道。
205.条款65:根据条款60-64中任一项所述的升降机吊笼,其中,所述一个或更多个导轨部分对是彼此竖直间隔开的多个导轨部分对,使得每个导轨部分对与所述框架的一个排
的一个横梁对对齐,所述多个导轨部分对中的每个导轨部分对被配置为在其上支撑块体。
206.条款66:根据条款60-65中任一项所述的升降机吊笼,其中,所述一个或更多个导轨部分对是一导轨部分对。
207.条款67:根据条款60-66中任一项所述的升降机吊笼,其中,所述一个或更多个导轨部分对的每个导轨部分在该导轨部分的顶面和底面之间具有纵向通道,所述一个或更多个导轨部分对的纵向通道被配置为与所述横梁的相应通道对齐,以有助于在所述横梁和所述导轨部分之间转移块体。
208.条款68:一种升降机吊笼,该升降机吊笼用于在根据任一前述权利要求所述的能量储存和输送系统中使用,以使块体在塔架的较低海拔和塔架的较高海拔之间移动来储存能量,并且以在重力作用下使块体在所述塔架的较高海拔和所述塔架的较低海拔之间移动来产生电力,所述升降机吊笼包括:
209.顶部支撑件;
210.框架,该框架包括沿着平面延伸的后部支撑件以及附接至所述后部支撑件并且横向于所述后部支撑件延伸的一个或更多个侧臂;以及
211.一个或更多个可致动支撑件,其可移动地联接到所述后部支撑件上并且被配置为在缩回位置和伸出位置之间移动,在所述缩回位置,所述一个或更多个可致动支撑件相对于所述侧臂横向延伸,在所述伸出位置,所述一个或更多个可致动支撑件相对于所述后部支撑件的平面横向延伸,处于所述伸出位置的一个或更多个可致动支撑件被配置为当所述块体邻近所述后部支撑件时在其上支撑块体的底部。
212.条款69:根据条款68所述的升降机吊笼,其中,所述一个或更多个可致动支撑件是一个可致动支撑件对,其在所述伸出位置中被配置为接触和支撑块体的底部。
213.条款70:根据条款68-69中任一项所述的升降机吊笼,其中,所述一个或更多个可致动支撑件对是彼此竖直间隔开的多个可致动支撑件对,使得每个可致动支撑件对与所述框架的一个排的一个横梁对对齐,所述多个可致动支撑件对中的每个可致动支撑件对被配置为在其上支撑块体。
214.条款71:根据条款68-70中任一项所述的系统,其中,所述一个或更多个侧臂是一个或更多个侧臂对,每个侧臂对从所述后部支撑件的相对侧延伸。
215.条款72:根据条款68-71中任一项所述的系统,其中,所述后部支撑件具有矩形形状。
216.条款73:根据条款68-72中任一项所述的系统,其中,所述后部支撑件具有方形形状。
217.条款74:根据条款68-73中任一项所述的系统,其中,所述后部支撑件具有与所述块体的形状大致对应的形状。
218.虽然已经对本发明的某些实施例进行了描述,但这些实施例仅通过示例的方式呈现,并且不旨在限制本公开的范围。实际上,本文描述的新颖的方法和系统可以以各种其他形式来体现。此外,在不脱离本公开的精神的情况下,可以对本文描述的系统和方法进行各种省略、替代和更改。所附权利要求及其等效物旨在覆盖落入本公开的范围和精神内的这些形式或修改。因此,本发明的范围仅通过参考所附权利要求来限定。
219.结合特定方面、实施例或示例描述的特征、材料、特性或组合应理解为适用于本节
或本说明书其他地方描述的任何其它方面、实施例或示例,除非与其不相容。本说明书(包括任何所附权利要求、摘要和附图)中公开的所有特征和/或如此公开的任何方法或过程的所有步骤可以以任何组合来组合,但是这类特征和/或步骤中的至少一些相互排斥的组合除外。保护不限于任何前述实施例的细节。该保护延伸到本说明书(包括任何所附权利要求书、摘要和附图)中所公开的特征的任何新颖特征或任何新颖组合,或者延伸到所公开的任何方法或过程的步骤的任何新颖步骤或任何新颖组合。
220.此外,在单独实施方式的上下文中,本公开中描述的某些特征也可以在单个实施方式中组合实现。相反,在单个实施方式的上下文中描述的各种特征也可以在多个实施方式中单独实现或者在任何合适的子组合中实现。此外,尽管可以在上文将特征描述为在某些组合中起作用,但是在一些情况下,可以将来自所要求保护的组合的一个或更多个特征从该组合中删除,并且可以要求将该组合保护为子组合或子组合的变型。
221.此外,尽管可以以特定顺序在说明书中描述操作或在附图中描绘操作,但此类操作无需以所示特定顺序或按顺序执行,也无需执行所有操作,以实现所需结果。没有进行描绘或描述的其他操作可以并入到示例方法和过程中。例如,可以在所述任何操作之前、之后、同时或之间执行一个或更多个附加操作。此外,在其他实施方式中,操作可以被重新排列或重新排序。本领域技术人员将会理解,在一些实施例中,示出的和/或公开的过程中所采取的实际步骤可能与图中所示的步骤不同。依据实施例,可以删除上述的某些步骤,可以添加其他步骤。此外,以上公开的具体实施例的特征和属性可以以不同的方式组合,以形成附加实施例,所有这些都落入本公开的范围内。此外,上述实施方式中的各种系统部件的分离不应被理解为在所有实施方式中都需要这种分离,并且应当理解,所描述的部件和系统通常可以一起集成在单个产品中或打包到多个产品中。
222.为了本公开的目的,本文描述了某些方面、优点和新颖特征。根据任何特定实施例,不一定可以实现所有这些优点。因此,例如,本领域技术人员将认识到,本公开可以以实现如本文所教导的一个优点或一组优点的方式来实践或执行,而不一定实现本文可以教导或建议的其它优点。
223.条件性语言,比如“能够”、“可以”、“可能”、“也许”,除非另有特别说明,或者在所使用的上下文中以其他方式进行理解,否则通常旨在传达某些实施例包括某些特征、元素和/或步骤,而其它实施例不包括某些特征、元素和/或步骤。因此,这种条件性语言通常不旨在暗示一个或更多个实施例以任何方式需要特征、元素和/或步骤,或者暗示一个或更多个实施例必然包括用于在有或没有使用者输入或提示的情况下决定是否在任何特定实施例中包括或执行这些特征、元素和/或步骤的逻辑。
224.除非另有特别说明,否则连接性语言,比如短语“x、y和z中的至少一个”,通常应与所使用的上下文一起理解,以传达某一条目、术语等可以是x、y或z。因此,这种连接性语言通常不旨在暗示某些实施例需要存在x中的至少一个、y中的至少一个和z中的至少一个。
225.本文使用的程度语言,比如本文使用的术语“大致”、“大约”、“通常”和“基本上”表示接近所述值、量或特性的值、量或特性,其仍执行所需功能或实现所需结果。例如,术语“大致”、“大约”、“通常”和“基本上”可以指小于所述量的10%、小于所述量的5%、小于所述量的1%、小于所述量的0.1%和小于所述量的0.01%。作为另一示例,在某些实施例中,术语“大致平行”和“基本平行”是指与完全平行偏离小于或等于15度、10度、5度、3度、1度或
0.1度的值、量或特性。
226.本公开内容的范围不旨在受本节或本说明书其他地方的优选实施例的具体公开内容的限制,并且可以由本节或本说明书其他地方提出的权利要求或未来提出的权利要求来限定。权利要求的语言应基于权利要求中使用的语言进行广义解释,并且不限于在本说明书中或在本技术的审查期间描述的示例,这些示例应解释为非排它性的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1