用于自动地检验织物用线轴的质量的装置和方法与流程
用于自动地检验织物用线轴的质量的装置和方法
1.本发明涉及一种用于自动地检验织物用线轴的质量的装置,即一种能够对线轴的物理性质缺陷进行自动分析的装置。
2.在每个线轴生产线中,设置了检验线轴的质量的步骤。目前,线轴的质量完全由人工检验:操作者使用光源简单地用肉眼检验缺陷,例如“断裂的毛刺(broken burr)”、“打结(tie)”或其它形态缺陷。一旦识别出可能的缺陷,线轴就由操作者进行适当地分类,并且操作者填充中央数据库。
3.人工检验的主要缺点在于:鉴于待发现的缺陷的尺寸较小并且要检验的线轴之间的相似性,操作者会给出主观反馈。特别地,操作者对于缺陷的识别和后续的分类主要取决于个人的经验和能力,还取决于操作者在整个轮班期间维持高度的注意力和持续的专注力的能力、操作者对于每个线轴可用的时间、以及外部环境条件(例如,光源的存在与否及其可变性)。
4.本发明的目的是解决与线轴的人工质量检验相关的问题。
5.特别地,本发明的目的是提供一种用于自动地检验线轴的质量的装置,该装置能够对线轴的物理性质缺陷进行客观且可靠的分析。
6.特别地,本发明的目的是提供一种能够自动地分析线轴、识别线轴的物理性质缺陷(例如“断裂的毛刺”、“打结”或其它形态缺陷),使得线轴的分析能够持续有效的装置。
7.此目的通过根据权利要求1的用于自动地检验织物用线轴的质量的装置、根据权利要求13的相关机器、根据权利要求16的用于自动地检验线轴的质量的相关方法、根据权利要求19的计算机、以及根据权利要求20的用于实现用于自动地检验线轴的质量的方法的计算机程序来实现。从属权利要求描述了本发明的优选实施例。
8.通过根据附图并以非限制性示例的方式给出的以下描述,根据本发明的装置的特征和优点将变得显而易见,在附图中:
[0009]-图1为线轴1的轴测图;
[0010]-图2为线轴1的侧表面4的前视图,其中示出了一系列缺陷a、b和c;
[0011]-图3示出了在一实施例中的用于自动地检验织物用线轴的质量的装置100的俯视轴测图;
[0012]-图4示出了图3中的装置的仰视轴测图;
[0013]-图5示出了图3中的装置处于分析线轴的质量的构型中的截面视图;
[0014]-图6示出了图3中的装置的前视图;
[0015]-图7示出了图3中的装置的后视图;
[0016]-图8示出了用于自动地检验线轴的质量的装置100的灯的轴测图;
[0017]-图9示出了图8中的灯的截面视图;
[0018]-图10示出了在又一实施例中的用于自动地检验织物用线轴的质量的装置100的俯视轴测图;
[0019]-图11示出了图10中的装置的截面视图;
[0020]-图12示出了图10中的装置的前视图;
[0021]-图13示出了图10中的装置的俯视截面视图;
[0022]-图14示出了在一实施例中的机器200的俯视轴测图,该机器设置有如图3中的用于自动地检验织物用线轴的质量的装置100;
[0023]-图15示出了图14中的机器的前截面视图,其中,装置100处于更换线轴的构型中;
[0024]-图16示出了图14中的机器的侧向截面视图。
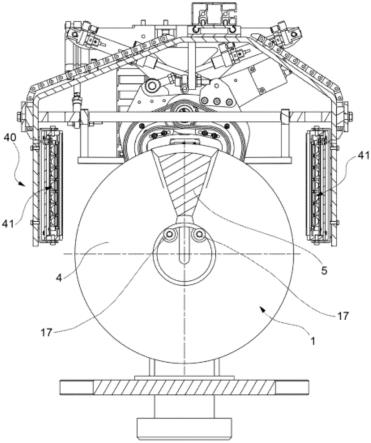
[0025]-图17示出了在又一实施例中的用于自动地检验织物用线轴的质量的装置100的俯视轴测图;
[0026]-图18示出了图17中的装置的截面视图;
[0027]-图19示出了在另一实施例中的机器300的俯视轴测图,该机器设置有多个如图17中的用于自动地检验织物用线轴的质量的装置100;
[0028]-图20示出了在例如从吊运车(trolley)装载线轴的步骤中图19中的机器的截面视图;
[0029]-图21示出了在装载了线轴并正对线轴进行分析的情况下图19中的机器的截面视图;
[0030]-图22示出了在装载了线轴的情况下图19中的机器的前视图。
[0031]
参照以上附图,特别是参照图1和图2,下文给出了有助于理解本发明的一些定义。
[0032]
管3:用于供形成线轴1的线进行缠绕的圆柱体;该圆柱体通常由塑料或硬纸板材料制成。
[0033]
线轴1:该线轴是通过缠绕线,使其附于管3上,从而维持圆柱对称性而获得的。出于机械纺织的原因,线轴1可以根据所收集的线的物理化学性质而具有不同的轮廓。
[0034]
线轴1的外表面2:该外表面对应于线轴的正面,即线在管3上进行缠绕的面。
[0035]
线轴1的侧表面或锥形表面4:这些表面对应于线轴的侧部,并且表示根据本发明的系统的关注表面。
[0036]
在线轴1的侧表面或锥形表面4上存在缺陷,并且这些缺陷是根据本发明的系统所关注的:
[0037]“断裂的毛刺”缺陷a:该缺陷是从线轴的侧表面突出的线状体。
[0038]“打结”缺陷b:该缺陷是线轴的没有遵从正确定位的部分。由于线在形成线轴的步骤中的错误定位,该部分的线从线轴的侧表面突出,然后从线轴的侧表面重新进入。
[0039]
其它形态缺陷c:理想的线轴应具有其上除了圆形绕线的纬纱外,其它形状不可辨识的侧表面。任何不同的事物,即可以与这种圆形缠绕的纬纱区分开来的事物都被认为是缺陷且必须被识别。
[0040]
参照附图,特别是参照图3、图10和图17,附图标记100总体上表示用于自动地检验织物用线轴的质量的装置。
[0041]
根据本发明的用于自动地检验线轴1的质量的装置100可以是用于自动地检验线轴1的质量的机器200、300的组成部分,或者该装置可以(作为附件)应用于预先存在的用于自动地检验线轴1的质量的机器200。图14示出了用于自动地检验线轴1的质量的机器200的示例。图19示出了用于多个线轴1的质量的多重自动检验的另一机器300的示例。
[0042]
用于自动地检验线轴1的质量的装置100,集成有或安装有装置100的机器200、300,或装载线轴的板101,包括:至少一个框架11,该框架支承臂17,待分析的线轴1可以放
置在该臂上。
[0043]
装置100包括至少一个视觉系统30和至少一个专用照明系统40。
[0044]
在装置100包括一个视觉系统30和一个对应的专用照明系统40的实施例中,可以仅分析线轴的一个侧表面4。
[0045]
在图4、图10和图17中的、装置100包括一对视觉系统30和一对对应的专用照明系统40的实施例中,可以同时分析线轴的两个侧表面4。
[0046]
视觉系统30对分析区域5进行分析,该分析区域被限定为线轴1的侧表面4的一部分。优选地,分析区域5对应于侧表面4的一个区段,并且从管3延伸涵盖线轴1的整个径向纵深。
[0047]
视觉系统30包括连接至计算机的数码相机31,在该计算机上加载了专用分析软件。
[0048]
因此,相机31布置在待分析的线轴1的侧表面4的前方。
[0049]
设置照明系统40,以便使上述缺陷显现,因此使“断裂的毛刺”缺陷a、“打结”缺陷b和其它形态缺陷c显现。事实上,照明系统40的目的是用直射光照亮从侧表面4突出且因此为缺陷的部分,并且代替地,主要使用漫射光照亮侧表面4本身。
[0050]
因此,照明系统40被设置以提供如下照明,该照明大致从侧向射向线轴的侧表面4,以便突出该侧表面的缺陷。
[0051]
照明系统40包括至少一对灯41,这些灯在图8和图9中详细示出。
[0052]
因此,灯41相对于待分析的线轴1的侧表面4大致横向地布置,并且这些灯在线轴的侧表面上投射大致从侧向打在侧表面4上的光束。
[0053]
每个灯41优选地包括一系列光源42,该一系列光源优选地为一系列高强度led。优选地,光源42被布置在一条线上。
[0054]
应当注意,包含在灯41中的光源42的数量取决于视觉系统30的分析区域5的尺寸:分析区域5的整个高度应被照亮。
[0055]
优选地,每个光源42(即每个led)设置有向分析区域5传送光束的圆柱形透镜44。
[0056]
灯41优选地包括光偏振过滤器。
[0057]
灯41优选地包括高效热扩散系统。优选地,该一系列光源42固定在被定位成与金属保护壳46直接接触的金属板45上。
[0058]
优选地,灯41是可定向的。实际上,灯41包括基部47,该基部可以连接到装置100,并且保护壳46以相对于该基部47可旋转的方式(例如,通过一对销48)固定。
[0059]
照明系统40包括定位于线轴1的侧表面4的相对两侧的两个灯41。
[0060]
优选地,两个灯41彼此相对地定位。
[0061]
优选地,两个灯41为侧灯、相对于线轴1的侧表面4以0
°
与15
°
之间的角度定位。
[0062]
应当注意,0
°
的角度对应于线轴1的侧表面4与灯41发射的光束之间平行的情况。
[0063]
在一实施例中,照明系统40包括两个灯41,这两个灯定位于线轴1的侧表面4的相对两侧、相对于线轴1的侧表面4以0
°
和15
°
的角度定位。
[0064]
照明系统40还包括两个附加的灯48,这两个附加的灯定位于线轴1的侧表面4的相对两侧。
[0065]
优选地,两个灯48彼此相对地定位。
[0066]
优选地,两个灯48为成角度的灯、相对于线轴1的侧表面4以10
°
与60
°
之间的角度定位。
[0067]
所谓的成角度的额外的灯48与侧灯41类型相同,但是这些成角度的灯以更大的正向角度(frontal angle)和距离进行布置。这样的目的是能够分析甚至非常暗的线轴并且寻找形态缺陷以外的缺陷,例如颜色缺陷。
[0068]
优选地,装置100包括护罩50,该护罩适于至少部分地覆盖视觉系统30和/或照明系统40和/或线轴1的侧表面4的分析区域5。有利的是,线轴1实际上在借助于护罩50而获得的暗室内分析,该暗室保护线轴免受其它不希望的光源的影响。
[0069]
优选地,相机31由容器30和放置在透镜与线轴之间的光学玻璃保护。玻璃的面和胶的面必须以非常高的质量进行处理。
[0070]
应当注意,由视觉系统30进行的每个拍摄镜头的曝光时间是针对所分析的每个线轴1计算的,以便调和所获得的图像的灰度。
[0071]
优选地,至少视觉系统30的相机31是可移动的,即该相机可以背离臂17(线轴1定位在该臂上)进行移动,从而产生空间以便于线轴的更换。
[0072]
在图5的示例中,相机31固定至移动臂33,当需要更换线轴时,该移动臂允许相机升高,而当需要分析线轴时,该移动臂允许将相机降低回到操作位置。
[0073]
在图17中的示例中,相机31固定至移动臂33,当需要更换线轴时,该移动臂允许相机沿着线轴的轴线朝向和背离线轴纵向地移动。
[0074]
优选地,视觉系统30和照明系统40这两者都是可移动的,即它们可以背离臂17(线轴1定位在该臂上)移动,从而产生空间以便于线轴的更换,或者调整视觉系统和照明系统以用于线轴的正确分析。
[0075]
在图10中的示例中,相机31和灯41、48这两者都固定在可移动框架38上,当需要更换线轴时,该可移动框架允许相机和灯升高,而当需要分析线轴时,该可移动框架允许相机和灯降低回到操作位置。在这样的实施例中,可移动框架38还包括护罩50,该护罩适于至少部分地覆盖视觉系统30和/或照明系统40和/或线轴1的侧表面4的分析区域5。
[0076]
在图17中的示例中,相机31和灯41、48这两者都可沿轨道49滑动,当需要更换线轴时,该轨道允许相机和灯沿线轴的轴线朝向和背离线轴移动。在这种实施例中,相机31固定至臂33,并且灯41、48固定至吊运车38,臂33和吊运车38这两者都可沿轨道滑动。优选地,臂33和吊运车38由相关的马达37移动。
[0077]
优选地,装置100还包括用于移动线轴1的自动系统,例如如图4中所示。移动系统70包括适于旋转支承销17的至少一个辊71,线轴1布置在该支承销上。在图7中的示例(图7中线轴定位在一对支承销17上)中,移动系统70包括一对辊71,每个辊适于旋转一个相关的支承销17。
[0078]
优选地,辊71可通过合适的移动臂72进行移动。
[0079]
图14示出了用于自动地检验线轴1的质量的机器200的示例。
[0080]
机器200包括框架11,该框架支承臂17(或销17),待分析的线轴1可以放置在该臂(或销)上。
[0081]
根据本发明的用于自动地检验线轴的质量的机器200包括:
[0082]-框架11,该框架设置有臂17,待分析的线轴可以放置在该臂上;
[0083]-系统,该系统用于移动待分析的线轴;
[0084]-计算机,分析软件被加载到该计算机上;
[0085]-用于自动地检验待分析的线轴的质量的装置100,该装置连接至该系统以用于移动线轴并将线轴移动至该计算机。
[0086]
优选地,机器200还包括护罩50,该护罩适于至少部分地覆盖视觉系统30和/或照明系统40和/或线轴1的侧表面4的分析区域5。
[0087]
优选地,如图4和图14中所示,机器200包括“板”型装载系统。
[0088]
板101是机械装置,该机械装置将线轴支承在两个销17上(也在图6中示出),并且该机械装置可以沿传送带201传送(在图14中部分地示出)。
[0089]
板101包括支承一对臂17的框架11,待分析的线轴1在该对臂上行进。
[0090]
板101布置在传送带上,使得相关的管3相对于由传送带201限定的传送平面水平地、横向地定位(如图16中所示)。
[0091]
传送带201将板101移动至定位于机器200的分析室内的机械止动件。一旦板101到达其目的地,传送带201就被阻挡。
[0092]
因此,辊71(例如,呈橡胶轮的形式)被降低,直到这些辊接触并按压支承销17,并且通过压力与该支承销保持接触。当辊71开始同步旋转时,这些辊通过摩擦将运动传递到管3,并因此传递到线轴1,该线轴也开始旋转。
[0093]
视觉系统30下降,直到每个视觉系统均被定位成面向线轴1的侧面4,以便能够框定整个分析区域5。
[0094]
当装置100规定了分析区域时(例如,在图10中),照明系统40也下降,直到这些照明系统各自定位于线轴1的侧面4的一侧,以便正确地照亮分析区域5。
[0095]
视觉系统30和照明系统40根据线轴的尺寸被调整到位。
[0096]
在线轴1旋转时,拍摄每个侧面4的分析区域5的照片。优选地,线轴1的两个侧面4的照片以交错的方式(首先一个,然后另一个)进行拍摄,以防止每个侧面4的照明系统40相互干扰。
[0097]
一旦线轴1完成了完整的旋转(因此是360度),并且因此,一旦拍摄了线轴的两个侧面4的整个圆周的照片,视觉系统30(以及可能的照明系统40,这取决于装置100的类型)就被再次升起。
[0098]
当路径空闲时,传送带被移动以允许布置有刚刚被分析的线轴的板101的退出,并且允许布置有仍待分析的线轴的下一个板的进入。
[0099]
图19示出了用于多个线轴1的质量的多重自动检验的另一机器300的示例。
[0100]
机器300包括框架11,该框架支承多个臂17(或销17),待分析的线轴1可以放置在这些臂(或销)中的每一个上。因此,机器300允许多个线轴1的多重自动检验。在图22中的示例中,通过非限制性示例的方式确切地给出,机器300能够同时自动地检验12个线轴。
[0101]
根据本发明的用于多个线轴的质量的多重自动检验的机器300包括:
[0102]-框架11,该框架设置有至少一个臂17、优选多个臂17,待分析的线轴可以放置在该至少一个臂中的每个臂上;
[0103]-多个移动系统,每个移动系统连接至待分析的线轴;
[0104]-至少一个计算机,分析软件被加载到该至少一个计算机上;
[0105]-多个装置100,每个装置旨在用于自动地检验线轴的质量,且连接至相应的线轴移动系统并且连接至至少一个计算机。
[0106]
机器300的框架11包括至少一个臂17,线轴1可以被装载在该至少一个臂上。优选地,框架11包括多个臂17,该多个臂被布置成形成至少一列171和/或至少一个水平行172,线轴可以定位在该至少一列和/或至少一个水平行上。
[0107]
优选地,框架11包括多个列171和/或多个水平行172。
[0108]
优选地,机器300还包括护罩50,该护罩适于至少部分地覆盖视觉系统30和/或照明系统40和/或线轴1的分析区域5。
[0109]
优选地,机器300包括“吊运车”类型的装载系统,如图17和图20中所示。
[0110]
在图19中清楚可见的吊运车301支承至少一个线轴1,优选地支承多列的线轴和/或多个水平行的线轴。
[0111]
吊运车301(也称为模块)沿移动线被传送直到机器300。
[0112]
线轴从吊运车301本身被装载到机器300的分析室内。特别地,线轴各自被装载在相关的臂17上。
[0113]
视觉系统30下降,直到每个视觉系统均被定位成面向线轴1的侧面4,以便能够框定整个分析区域5。
[0114]
当装置100规定了分析区域时(例如,在图18中),照明系统40也下降,直到这些照明系统各自定位于线轴1的侧面4的一侧,以便正确地照亮分析区域5。
[0115]
视觉系统30和照明系统40根据线轴的尺寸被调整到位。
[0116]
在线轴1旋转时,拍摄每个侧面4的分析区域5的照片。优选地,线轴1的两个侧面4的照片以交错的方式(首先一个,然后另一个)进行拍摄,以防止每个侧面4的照明系统40相互干扰。
[0117]
一旦线轴1完成了完整的旋转(因此是360度),并且因此,一旦拍摄了线轴的两个侧面4的整个圆周的照片,视觉系统30(以及可能的照明系统40,这取决于装置100的类型)就被再次升起。
[0118]
当路径空闲时,吊运车301卸载刚刚分析的线轴,并且新的吊运车301装载仍待分析的线轴。
[0119]
用于自动地检验线轴的质量的装置100允许通过灯41、48,自动化循环和专用软件来分析线轴。灯充分地照亮(侧灯)线轴的表面,自动化循环允许获得线轴的适当图像,并且软件处理允许推定缺陷。
[0120]
应当注意,装置100已经被设计成适合已经存在的自动化场景。
[0121]
本发明还涉及一种用于自动地检验织物用线轴的质量的方法。
[0122]
根据本发明的方法至少包括以下步骤:
[0123]-提供至少一个如上所述的用于自动地检验待分析的线轴的质量的装置100;
[0124]-打开装置100的一对灯41、灯48以照亮分析区域5,同时通过装置100的相机31拍摄线轴的对应于分析区域5的照片;
[0125]-通过外推算法从线轴的对应于分析区域5的照片推定缺陷。
[0126]
特别地,外推算法由计算机运行并且至少包含以下步骤:
[0127]-扫描线轴的对应于分析区域的照片;
[0128]-提取照片的由角度0
°
、45
°
、90
°
和135
°
识别的四个偏振平面;
[0129]-将由一个偏振平面获得的图像从由另一个偏振平面获得的图像中减去,以突出线轴的侧表面的形态的差异;
[0130]-将图像的纬纱从圆形转换为线性;
[0131]-识别所有能够被潜在地分类为有缺陷的像素集合;
[0132]-将可参数化的过滤器应用于所有像素集合,以便排除假的缺陷;
[0133]-例如通过形态学扩展方法(morphological expansion method)检验被分类为有缺陷的像素集合附近的像素是否本身为所述集合的一部分;
[0134]-如果被分类为有缺陷的像素集合附近的像素本身为所述集合的一部分,则将被分类为有缺陷的所述像素集合附近的所述像素结合进来。
[0135]
特别地,识别所有能够被分类为有缺陷的像素集合的步骤至少包括以下子步骤:
[0136]-定义适用于表征由外推算法获得的缺陷的缺陷参数,例如尺寸、形状、方向、亮度、微对比度和非等比性(anisometry);
[0137]-从由将图像的纬纱从圆形转换为线性的步骤获得的像素中获取由所述缺陷参数获取的值;
[0138]-将所述值与包含在先前分类的有缺陷图像的数据库中的对应缺陷参数的值进行比较;
[0139]-基于缺陷参数的值与所述先前分类的缺陷的对应值之间的微小差异,对缺陷分类。
[0140]
现在将详细地描述自动化循环、从保存的图像推定缺陷、以及通过神经网络识别缺陷类型。
[0141]
自动化循环:
[0142]
1.已经安装至支承销17的线轴1通过传送带移动。
[0143]
2.系统识别分析区域内线轴1的存在,因此系统用机械止动件阻挡线轴。
[0144]
3.辊71下降到支承销17上,并且通过压力与该支承销保持接触。同时,框定线轴1的两个侧面4的两个相机31下降。
[0145]
4.单个马达使辊71旋转,并且因此使线轴1旋转。
[0146]
5.编码器或解析器允许知道所执行的旋转角度。拍摄线轴的照片(对应于分析区域5),并且因此分析圆形冠的扇区,该扇区以管的周长作为最小值,线轴的周长作为最大值,并且以从线轴的中心开始的30
°
角的边作为其端部。
[0147]
6.每次拍摄照片时,专用的灯41、48被控制。
[0148]
7.同时分析线轴1的两个侧面4;为了不影响一个对另一个的照明,以异步方式(例如,以15
°
的延迟)拍摄照片。
[0149]
8.一旦线轴完成了360
°
,辊71和相机31就再次升起;因此,线轴被释放以允许线轴继续沿传送带行进。
[0150]
从保存的图像推定缺陷
[0151]
使用装置100的方法包括按照下列算法的有序序列的应用:
[0152]
1.偏振过滤器:提取4个偏振平面,然后重构更清晰的图像。
[0153]
2.频率过滤器:使用傅立叶变换算法将图像转换成频谱。在应用高通滤波器之后,
将其从频谱还原为几何图像。
[0154]
3.偏振差过滤器:通过执行4个偏振平面的连续减法来构建图像的亮度图。因此,只有与常规纬纱不对齐的部分才会出现。
[0155]
4.平滑处理。
[0156]
5.对图像进行建模,使得纬纱的趋势从圆形变为线性。因此,出现了脱纬缺陷。
[0157]
6.数值和几何过滤器:应用其它适当设置的数学过滤器,例如,所发现的像素的亮度和像素中的最小尺寸。
[0158]
7.在所有被识别为有缺陷的像素组中,通过组合彼此接近并维持所允许的几何形状的所有像素,重构单个缺陷。
[0159]
通过神经网络识别缺陷的类型
[0160]
视觉系统遵循神经网络类型的逻辑对缺陷进行分类。
[0161]
建立已经由操作者标记的图像数据库。此集合体的数量级必须至少是几百个图像。每个图像提供了大量的信息,例如缺陷的尺寸、形状、方向和亮度。
[0162]
一旦检测到缺陷,系统就通过比较所有信息来搜索最接近的匹配,并且对缺陷进行分类。
[0163]
因此,系统自动地将例如“断裂的毛刺”缺陷与“打结”缺陷区分开。因此,用户可以对每个缺陷进行加权,以获得所分析的线轴的总体评估。
[0164]
本发明还涉及一种计算机,该计算机被编程以实现如上所描述的用于自动地检验织物用线轴的质量的方法。
[0165]
本发明还涉及一种包括代码部分的计算机程序,当该程序在计算机上运行时,这些代码部分实现如上所描述的用于自动地检验织物用线轴的质量的方法。
[0166]
创新的是,用于自动地检验线轴1的质量的装置100以及相关的自动检验方法允许对线轴进行的分析是客观的,并因此使得评价和分类是客观且无误的。
[0167]
因此,有利的是,本文描述的装置和方法允许线轴的分析和分类完全自动化,具有确保评价的绝对客观性并降低投诉和由此引发的处罚的成本的双重目的。这方面是非常重要的,尤其是对于高端产品类别。
[0168]
显然,本领域技术人员可以对上述主题做出改变,所有这些改变都包含在如随附权利要求限定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1