用于竖直仓库的自动化柱的系统的制作方法
本发明的目的是一种用于储存和取回材料的竖直仓库的自动化柱系统。根据本发明的柱系统可以用于例如但不限于“汽车”物流领域。
背景技术:
1、在现有技术中,在生产系统的物流中,已知人机工程学的竖直仓库,其中可以根据需要储存和取回材料、半成品或货物。
2、竖直仓库的一已知示例包括多个彼此面对的柱,柱允许放置支撑件或架子,在这些支撑件或架子上可以放置要储存的部件。竖直仓库的柱的最小数量是两个,最好是四个,但是这个数量显然根据仓库的类型而变化。
3、使用竖直仓库可以实现一系列的好处,其中应该提到以下几点:竖直和水平的空间利用的优化;增加每小时拣选和储存操作频率的可能性;减少拣选和储存操作中的错误;为仓库操作者提供更高的安全性和更好的人机工程学;更好地保护部件,更容易监控储存的部件;更容易处理部件;将竖直仓库与公司管理信息系统集成和连接的可能性,例如与“企业资源规划”(erp)集成和连接。
4、已知仓库的缺点在于,它们需要用于每个柱的处理机构,例如液压或电子机构,因此需要多个操作者在场,并且需要由操作者来管理各个柱的运动之间的同步。这使得部件处理过程漫长而费力。
5、此外,根据已知技术的柱可能只能向下移动支撑件。换句话说,每根柱所配备的、其上放置有部件的支撑件的运动只发生在向下的方向上。事实上,很难沿相反方向移动,即向上移动,因为传动机构必须克服施加在柱支撑件上的(被支撑部件的)重力。因此,在已知的柱中,支撑件的向上运动总是在支撑件卸载的情况下进行。
6、因此,需要定义一种没有上述缺点的自动化柱系统。
技术实现思路
1、因此,本发明的目的是一种用于竖直仓库应用的创新的自动化柱系统。该目的是通过将柱系统设计成使得柱的运动自动同步来实现的。同步通过由气动/电动或机械驱动装置控制的多个关节进行。
2、此外,根据本发明的另一方面,一种创新的运动传输系统允许柱支撑件的运动反向,并且即使在支撑件上存在载荷的情况下也可以将支撑件向上移动,使得柱系统不仅自动化,而且符合人机工程学。
3、根据本发明,这些和其它目的和优点是通过一种用于竖直仓库的创新的自动化柱系统来实现的,该系统具有所附独立权利要求中阐述的特征。
4、根据所附从属权利要求中公开的特征描述了本发明的进一步优选和/或特别有利的实施例。
技术特征:
1.一种用于竖直仓库的自动化柱的系统(100,200),所述系统包括:
2.根据权利要求1所述的系统(200),其特征在于,所述多个柱(10)中的第一柱(12)设置有阻尼器元件(13),用于在待储存的部件的装载步骤期间制动所述支撑件(30)的向下运动。
3.根据权利要求2所述的系统(200),其特征在于,所述阻尼器元件(13)是设置有双锥度具有可变刚度的螺旋弹簧。
4.根据权利要求2或3所述的系统(200),其特征在于,所述第一柱(12)包括曲柄(14),所述曲柄操作所述支撑件(30)向上运动的机械驱动。
5.根据前述权利要求中任一项所述的系统(200),其特征在于,所述多个柱(10)中的第二柱(15)设置有杠杆机构(16),用于自动机械致动所述支撑件(30)的向下运动。
6.根据权利要求1至4中任一项所述的系统(200),其特征在于,所述多个柱(10)中的第二柱(15)设置有手柄,用于机械致动所述支撑件(30)的向下运动。
7.根据权利要求2或3所述的系统(200),其特征在于,所述第一柱(12)和所述第二柱(15)位于沿着所述框架结构(110)的对角线的一对相对的顶点上。
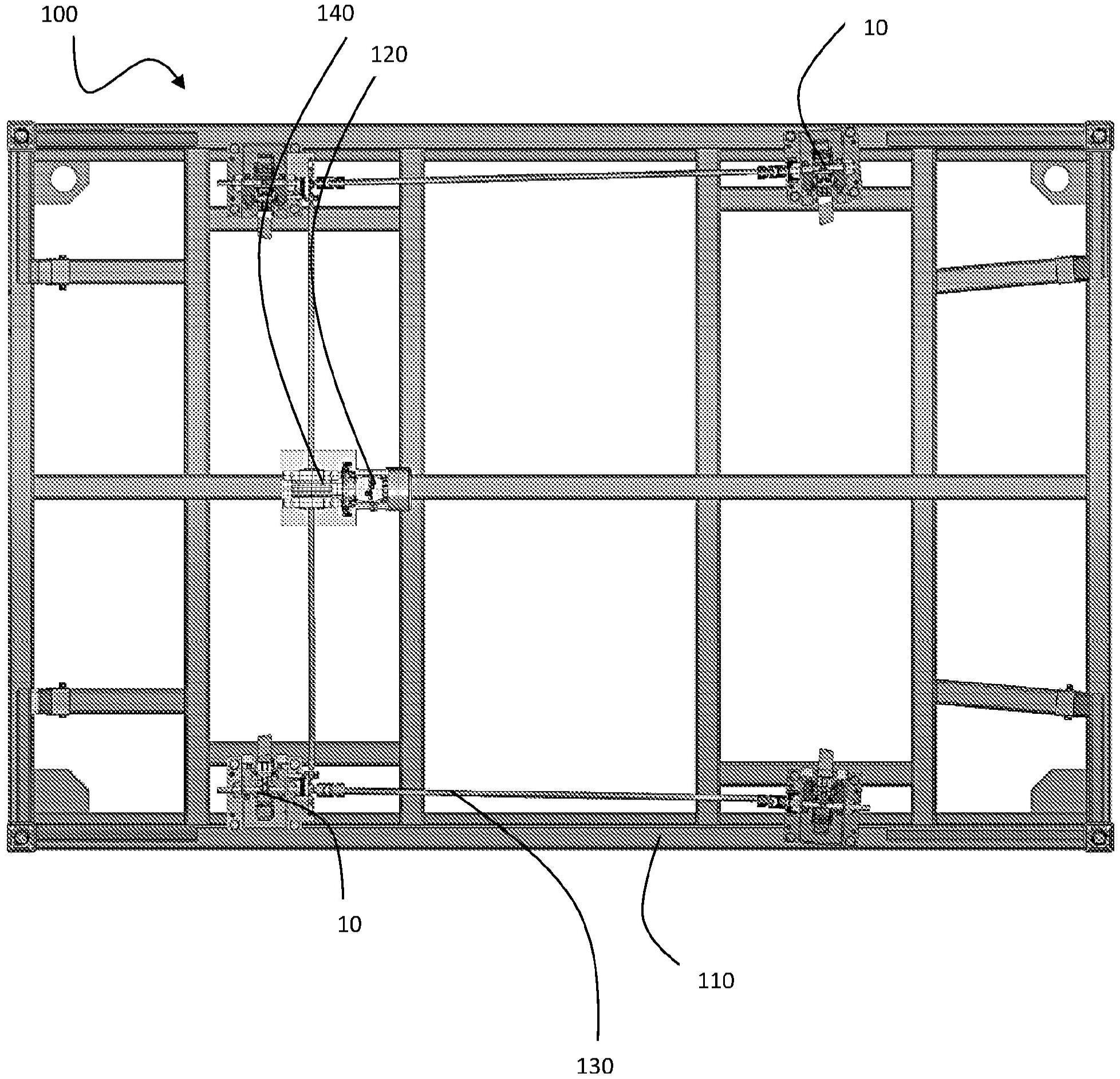
8.根据前述权利要求中任一项所述的系统(100,200),其特征在于,所述气动/电动驱动器通过气动/电动齿轮马达(120)来操作。
9.根据前述权利要求中任一项所述的系统(100,200),其特征在于,所述多个自动化柱(10)相对于竖直轴线呈高达35°的倾斜。
10.根据前述权利要求中任一项所述的系统(100,200),其特征在于,所述系统包括用于计算放置在多个支撑件(30)上的部件数量的计数器,所述计数器以触发端部止挡件(140)的方式构型。
11.根据前述权利要求中任一项所述的系统(100,200),其特征在于,所述多个柱(10)中的一个或多个柱相对于其他柱(10)以0°至30°范围内的偏移角错位定位。
技术总结
一种用于竖直仓库的自动化柱的系统(100,200),具有:‑整体连接到框架结构(110)的多个自动化柱(10),柱(10)的数量总是偶数,所述多个自动化柱中的每一个进而具有围绕上齿轮组件(80)和下齿轮组件(60)旋转的传动构件(50)以及由传动构件(50)支撑的多个支撑件(30),所述多个支撑件通过传动构件(50)的旋转运动从顶部平移到底部,反之亦然;‑气动/电动或机械驱动器;‑数量等于柱(10)的数量的多个机械传动装置(130);‑气动/电动或机械驱动器和机械传动装置(130)使多个支撑件(30)的向上或向下运动同步,所述多个支撑件支撑待储存的相应部件;以及‑多个机械传动装置包括相应的多个万向节(130)。
技术研发人员:彼得罗·劳达尼
受保护的技术使用者:彼得罗·劳达尼
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!