用于缓冲条带的贮布装置和方法与流程
1.本发明涉及用于缓冲条带的的贮布装置(festooner)和方法,特别是用于轮胎成型中的条带的贮布装置和方法。
背景技术:
2.贮布装置用于在连续输入与不连续输出之间临时存储、累积或缓冲一定长度的条带。贮布装置例如可以放置在用于挤出连续条带的挤出机与用于将所述连续条带切割成用于轮胎的定长切割组成部分的切割机之间。贮布装置包括两组辊,该两组辊可朝向彼此和远离彼此移动,以改变贮布装置的缓冲容量。当条带输送通过贮布装置时,辊与条带一起被动地旋转。
3.由于在贮布装置中产生的力,条带可能变形。特别地,当相对薄或未受压的条带被供给到辊上方时,必须克服以使辊运动的惯性无论多么小都可能在条带中引起张力。为了解决这个问题,已知的是为条带提供相对坚固材料的衬里,该衬里沿着条带穿过贮布装置的路径加强条带。在条带离开贮布装置之后,条带和衬里分离,并且衬里收集在废料仓中。
4.kr 2003-0042666 a承认薄条带对导致材料变形的小因素敏感。该专利提出使用链条,该链条以正确速度驱动辊,使得可以消除条带中的张力,由此防止由于外力引起的条带变形。该专利还公开了一种扭曲皮带,该扭曲皮带沿着条带的路径布置成环形环路,并且用作衬里以防止条带与辊之间的直接接触。
技术实现要素:
5.当操作者将新条带手动地供给到贮布装置中时,方便的是使两组辊朝向彼此移动,使得操作者不必在较大的距离上下引导条带。换言之,辊组移动到其中贮布装置的容量处于最小值的位置。根据kr 2003-0042666 a的已知贮布装置的缺点在于,位于贮布装置上端的辊组固定到所述上端,因此,位于下端的辊组必须一直向上移动到位于上端的辊组。在所述上端附近,辊组可能高达距地面两米或三米,并且对于手动装载而言不容易到达。
6.而且,新条带必须小心地放置在扭曲皮带的表面上,该扭曲皮带在每对辊之间具有扭曲。这可能是困难的,特别是当辊组靠近在一起并且扭曲相对尖锐时。
7.最后,各个扭曲可能潜在地使条带变形或损坏。
8.本发明的目的是提供用于缓冲条带的贮布装置和方法,其中,可以改善将新条带供给到贮布装置中的人体工程学。
9.根据第一方面,本发明提供了一种用于缓冲条带的贮布装置,其中,所述贮布装置包括:第一保持器和第二保持器,该第一保持器和第二保持器能在缓冲方向上朝向彼此和远离彼此地相对移动,以改变所述贮布装置的缓冲容量;以及第一组缓冲辊和第二组缓冲辊,该第一组缓冲辊和第二组缓冲辊分别由第一保持器和第二保持器保持,其中,第一组缓冲辊和第二组缓冲辊在所述第一组缓冲辊和所述第二组缓冲辊之间限定了沿着第一组缓冲辊中的缓冲辊和第二组缓冲辊中的缓冲辊交替地延伸的蜿蜒缓冲路径,其中,所述贮布
装置还包括:环形驱动元件,该环形驱动元件用于驱动第一组缓冲辊和第二组缓冲辊中的每个缓冲辊,其中,所述贮布装置还包括:超长收集器,该超长收集器用于收集和放出由于贮布装置的缓冲容量的改变而导致的环形驱动元件的超长。
10.驱动元件沿着条带的缓冲路径延伸或行进,并且或多或少地以与条带相同的方式表现,第一组缓冲辊和第二组缓冲辊中的每个缓冲辊被驱动的速度可以保持等于或大致等于条带在相应缓冲辊处的速度。因此,条带不必克服缓冲辊的惯性,并且可以在没有过大的张力施加在条带上的情况下输送通过贮布装置。因此,贮布装置适于缓冲易碎或容易变形的条带,诸如用于轮胎成型中的胶条,而不需要衬里。
11.由于两个保持器可朝向彼此移动,所以可获得更符合人体工程学的装载位置,以便将条带手动地装载到贮布装置中。
12.在优选实施方式中,超长收集器在缓冲方向上仅位于缓冲路径的一侧。驱动元件的超长的相当大的部分且优选地驱动元件的全部或整个超长可以仅在贮布装置的一端收集。换言之,在缓冲路径的另一侧和/或贮布装置的另一端,没有负责收集驱动元件的贮布装置的零件。因此,贮布装置的更多空间可以用于缓冲条带。因此,可以增加贮布装置的容量。另选地,所得到的贮布装置可以更紧凑,同时保持相同的容量。更具体地,因为可以改进相对移动的保持器之间的距离和/或所述保持器的装载位置,所以可以更符合人体工程学地装载贮布装置。
13.优选地,超长收集器在缓冲方向上位于第一组缓冲辊的背对第二组缓冲辊的一侧。因此,超长收集器不干扰第二组缓冲辊和/或第二保持器。
14.另外或另选地,第一组缓冲辊位于第二组缓冲辊上方,其中,超长收集器位于第一组缓冲辊上方。在超长收集器位于头顶上方的情况下,贮布装置缓冲条带的部分可以更靠近地面定位,即在操作者可以方便地装载贮布装置的范围内。
15.在另一个实施方式中,超长收集器具有足以在贮布装置的缓冲容量最小时收集环形驱动元件的整个超长的收集器容量。由此,环形驱动元件可被创建成具有一长度,该长度足以在贮布装置从最大缓冲容量一直到最小缓冲容量的整个移动范围上容纳贮布装置,即,环形驱动元件不限制贮布装置缓冲容量。
16.在另一个实施方式中,超长收集器包括第一组收集器轮和第二组收集器轮,该第一组收集器轮和第二组收集器轮在所述第一组收集器轮和第二组收集器轮之间限定了沿着第一组收集器轮中的收集器轮和第二组收集器轮中的收集器轮交替延伸的蜿蜒收集器路径,其中,环形驱动元件沿着所述蜿蜒收集器路径延伸。蜿蜒收集器路径可用于以与缓冲路径用于缓冲条带大致相同的方式临时收集并随后放出环形驱动元件的超长。
17.优选地,蜿蜒缓冲路径包括在第一组缓冲辊中的缓冲辊和第二组缓冲辊中的缓冲辊之间延伸的多个第一线段,其中,蜿蜒收集器路径包括在第一组收集器轮中的收集器轮和第二组收集器轮中的收集器轮之间延伸的多个第二线段,其中,第二线段的数量是第一线段的数量的至少两倍。因此,利用第一组收集器轮和第二组收集器轮中的收集器轮之间仅沿缓冲方向的一个方向的相对移动,收集器路径可以至少以与缓冲路径由于第一保持器和第二保持器沿缓冲方向的相对移动而减小或增大的量相同的量增大或减小。换言之,超长收集器可以在缓冲路径的一侧同时收集由第一保持器的移动和第二保持器的移动产生的超长。当将第二线段的数量增加或减少到多于或少于第一线段数量的两倍时,响应于贮
布装置的容量变化,保持器中的一个将相应地比另一个更快或更慢地移动,从而改变相应的装载位置。
18.在另外实施方式中,超长收集器包括收集器框架,该收集器框架布置成在第一保持器和第二保持器移动的同时在缓冲方向上保持静止,其中,第一组收集器轮由第一保持器保持,并且其中,第二组收集器轮由收集器框架保持。优选地,收集器框架在缓冲方向上位于第一保持器上方。因此,第一组收集器轮和第二组收集器轮中的收集器轮之间的相对移动可以通过相对于收集器框架移动第一保持器来产生。
19.在另外的实施方式中,环形驱动元件是链条,其中,第一组收集器轮和第二组收集器轮包括链轮。链轮可以有效地与链条接合,并引导所述链条沿着收集器路径通过超长收集器。
20.在另一个实施方式中,贮布装置包括:第一组缓冲轮和第二组缓冲轮,该第一组缓冲轮和第二组缓冲轮分别同轴地安装到第一组缓冲辊和第二组缓冲辊,并且能与第一组缓冲辊和第二组缓冲辊一起旋转,其中,环形驱动元件被布置成用于通过分别接合第一组缓冲轮和第二组缓冲轮中的相应缓冲轮来单独地驱动第一组缓冲辊和第二组缓冲辊中的每个缓冲辊。因此,每个缓冲辊可以以与驱动元件在相应缓冲辊的位置处的速度相对应的速度驱动。当贮布装置的容量变化时,根据各个缓冲辊沿着缓冲路径的位置,每个缓冲辊的速度可以不同。
21.在另一个实施方式中,贮布装置还包括:中间构件,该中间构件用于引导条带进出贮布装置,其中,中间构件被布置成在第一保持器和第二保持器移动的同时在第一保持器与第二保持器之间沿缓冲方向保持静止。由此,条带可以在恒定的高度或位置处供给到贮布装置中和从贮布装置引出,而与第一保持器和第二保持器的移动无关。
22.优选地,第一保持器和第二保持器能分别在缓冲方向上朝向彼此移动到与中间构件的相对侧直接相邻并在中间构件的相对侧上的第一装载位置和第二装载位置。在所述装载位置,操作者不必一直向上或一直向下到达贮布装置以到达第一保持器和第二保持器上的缓冲辊。相反,缓冲辊可以方便地定位成紧邻中间构件,使得条带可以符合人体工程学地和/或不费力地引导通过缓冲路径。
23.另外或另选地,贮布装置包括:底座,该底座用于将所述贮布装置放置在地面上,其中,中间构件相对于底座定位成使得中间构件在地面上方的五十厘米至一百八十厘米范围内的高度处延伸。在所述高度处,中间构件和定位在其邻近所述中间构件的相应装载位置处的保持器处于人体工程学高度,以便将条带手动装载到贮布装置中。
24.在另一个实施方式中,缓冲方向是竖直的或大致竖直的。
25.在另一个实施方式中,贮布装置还包括:张紧器,该张紧器用于沿缓冲方向将张紧力施加到第一保持器和第二保持器上。张紧力旨在减轻由环形驱动元件施加到所述保持器上的驱动力的影响。所述驱动力例如可以由环形驱动元件与缓冲/收集器轮之间的摩擦和/或由环形驱动元件自身内产生的动能引起。当这种驱动力超过第一保持器和/或第二保持器的质量时,它们可能导致所述保持器中的一个或两个不可预测地移动。
26.在其一个实施方式中,贮布装置包括:张紧带,该张紧带连接到第一保持器和第二保持器,其中,张紧带的至少一端联接到张力调节构件。张力调节构件、特别是气缸可以被控制在张力方向上缩回或伸出,从而增加或减小张紧带中的张力和/或补偿当第一保持器
和第二保持器移动不同的距离时的长度差异。
27.在其另选实施方式中,贮布装置包括:张紧带,该张紧带连接到第一保持器和第二保持器,其中,张紧带的至少一端联接到张力偏置构件。张力偏置构件、特别是弹簧可以被偏置以在张紧方向上拉动张紧带。
28.根据第二方面,本发明提供了一种用于缓冲条带的贮布装置,其中,贮布装置包括:第一保持器和第二保持器,其中,第一保持器和第二保持器中的至少一个能在缓冲方向上朝向和远离第一保持器和第二保持器中的另一个移动,以改变贮布装置的缓冲容量,其中,贮布装置还包括:第一组缓冲辊和第二组缓冲辊,该第一组缓冲辊和第二组缓冲辊分别由第一保持器和第二保持器保持,其中,第一组缓冲辊和第二组缓冲辊在所述第一组缓冲辊和所述第二组缓冲辊之间限定了沿着第一组缓冲辊中的缓冲辊和第二组缓冲辊中的缓冲辊交替地延伸的蜿蜒缓冲路径,其中,贮布装置还包括多个驱动器,以单独地驱动第一组缓冲辊和第二组缓冲辊中的缓冲辊。
29.该实施方式允许将每个驱动器特别地设定和/或控制到不同的速度,从而使每个缓冲辊以与沿着缓冲路径行进的条带几乎相同的速度或完全相同的速度旋转。因此,可以防止条带与缓冲辊之间的任何速度差异。因此,条带不必克服缓冲辊的任何惯性,并且可以在条带中不产生任何张力的情况下输送通过贮布装置。因此,贮布装置可用于输送易碎或容易变形的条带,诸如用于轮胎成型中的胶条,而不需要衬里。
30.优选地,多个驱动器是电动机。这些电动机可以容易地由适当的控制单元控制。
31.另外或另选地,贮布装置还包括:控制单元,该控制单元可操作地连接到多个驱动器中的每个驱动器,并且被配置成单独地控制多个驱动器中的每个驱动器。如上所述,通过单独控制每个驱动器,可以防止条带与缓冲辊之间的任何速度差异。
32.在其另外的实施方式中,条带以进入速度进入贮布装置并且以离开速度离开贮布装置,其中,贮布装置的缓冲容量以容量变化速度变化,其中,控制单元被配置用于基于进入速度、离开速度、容量变化速度和/或贮布装置内的相应驱动器的位置来控制多个驱动器中的每个驱动器。控制单元的这些输入参数可以有效地用于确定每个驱动器的正确速度。
33.在另外的实施方式中,贮布装置还包括:贮布装置电机,该贮布装置电机可操作地联接到第一保持器和/或第二保持器,以产生第一保持器与第二保持器之间沿缓冲方向的相对移动。贮布装置电机可以与驱动器一致地控制和/或反之亦然,以使容量的变化与缓冲辊和条带之间的相对速度相匹配。
34.在另外的实施方式中,第一保持器和第二保持器能沿缓冲方向朝向和远离彼此相对地移动,以改变贮布装置的缓冲容量。由于两个保持器可朝向彼此移动,所以可获得更符合人体工程学的装载位置,以便将条带手动地装载到贮布装置中。更特别地,第一保持器和第二保持器能在缓冲方向上朝向彼此分别移动到中间位置的相对侧上的第一装载位置和第二装载位置,中间位置在地面上方五十厘米至一百八十厘米范围内的高度处。
35.根据第三方面,本发明提供了一种用于缓冲条带的贮布装置,其中,贮布装置包括:第一保持器和第二保持器,该第一保持器和第二保持器能在缓冲方向上朝向彼此和远离彼此地相对移动,以改变贮布装置的缓冲容量;以及第一组缓冲辊和第二组缓冲辊,该第一组缓冲辊和第二组缓冲辊分别由第一保持器和第二保持器保持,其中,第一组缓冲辊和第二组缓冲辊在所述第一组缓冲辊和所述第二组缓冲辊之间限定了沿着第一组缓冲辊中
的缓冲辊和第二组缓冲辊中的缓冲辊交替地延伸的蜿蜒缓冲路径,其中,贮布装置还包括:保持器驱动器,该保持器驱动器可操作地联接到第一保持器和第二保持器,用于驱动第一保持器与第二保持器之间在缓冲方向上朝向彼此和远离彼此的相对移动,其中,保持器驱动器被配置成用于以与第二保持器的移动成不均匀的比率驱动第一保持器的移动。
36.当贮布装置处于最大容量时,可以通过增加第一保持器与第二保持器之间的距离来增加贮布装置的缓冲容量。因此,增加了贮布装置的高度。保持器可以从其各自的外部位置朝向在中间位置的相对侧上的各自的装载位置移动,以便方便地手动装载条带。通常,保持器以1:1的比率沿相反方向移动,使得它们在一半距离中间位置处相遇,在相对高的贮布装置的情况下,该中间位置高于站立在地平面上的人类操作者的人体工程学高度。已知的是为人类操作者提供升高的平台或产生凹坑,在该凹坑中,贮布装置的一部分可以降低,使得装载位置处于地平面上方的人体工程学高度处。在一些情况下,没有空间来产生凹坑,并且平台是不期望的。在这种情况下,根据本发明第三方面的贮布装置提供了可以以不均匀的比率移动到偏心中间位置的保持器,该偏心中间位置在站立在地平面上的人类操作者的人体工程学可及范围内。
37.优选地,不均匀的比率为至少1.1:1,优选至少1.5:1,最优选至少2:1。该比率越高,中间位置越偏心。
38.在另外的实施方式中,第一保持器在缓冲方向上位于第二保持器上方。因此,第一保持器可以比第二保持器更快地或在更大的距离上朝向中间位置移动。因此,中间位置可以定位于贮布装置的在缓冲方向上的中心的一半距离的下方。
39.在另外的实施方式中,第一保持器和第二保持器能在缓冲方向上朝向彼此分别移动到中间位置的相对侧上的第一装载位置和第二装载位置,中间位置在地面上方五十厘米至一百八十厘米范围内的高度处。所述范围在站立在地平面上的人类操作者的人体工程学可及范围内。
40.在一个实施方式中,保持器驱动器包括:皮带和多个皮带轮,该皮带和多个皮带轮形成具有至少为二的穿绕系数的皮带和皮带轮系统,其中,第一保持器联接到皮带的单个部分,并且第二保持器联接到皮带的至少两个部分。通过根据一个保持器相对于另一个保持器的期望行进优势选择穿绕系数,并且将相应的保持器连接到皮带的部分以传递所述行进优势,皮带和皮带轮系统可以容易地构造成实现前述不均匀的比率。
41.另选地,保持器驱动器包括:第一电机和第二电机,该第一电机和第二电机用于分别在缓冲方向上移动第一保持器和第二保持器;以及控制单元,该控制单元可操作地连接到第一电机和第二电机,以控制不均匀的比率的移动。可以单独控制电机以使各个保持器以期望的行进速率移动,从而获得上述不均匀的比率。
42.根据第四方面,本发明提供了一种使用根据本发明第一方面的贮布装置来缓冲条带的方法,其中,该方法包括以下步骤:
[0043]-沿着缓冲路径引导条带穿过贮布装置;
[0044]-利用环形驱动元件驱动第一组缓冲辊和第二组缓冲辊中的每个缓冲辊;
[0045]-通过使第一保持器和第二保持器在缓冲方向上朝向彼此和/或远离彼此移动来改变贮布装置的缓冲容量;以及
[0046]-响应于缓冲容量的改变,利用超长收集器收集和/或放出环形驱动元件的超长。
[0047]
上述方法涉及根据本发明第一方面的贮布装置的实际实施方案,由此具有相同的技术优点,下文中将不再重复。
[0048]
优选地,贮布装置还包括:中间构件,该中间构件用于引导条带进出贮布装置;和底座,该底座用于将所述贮布装置放置在地面上,其中,方法还包括以下步骤:
[0049]-将中间构件在缓冲方向上在第一保持器与第二保持器之间维持在静止位置,该静止位置位于地面上方五十厘米至一百八十厘米范围内的高度处;
[0050]-使第一保持器和第二保持器在缓冲方向上朝向彼此移动到分别与中间构件的相对侧直接相邻并在中间构件的相对侧上的第一装载位置和第二装载位置;以及
[0051]-在第一保持器和第二保持器分别处于第一装载位置和第二装载位置时,手动地引导条带沿着缓冲路径穿过贮布装置。
[0052]
根据第五方面,本发明提供了一种用于使用贮布装置来缓冲条带的方法,其中,贮布装置包括:第一保持器和第二保持器,其中,第一保持器和第二保持器中的至少一个能在缓冲方向上朝向和远离第一保持器和第二保持器中的另一个移动,以改变贮布装置的缓冲容量,其中,贮布装置还包括:第一组缓冲辊和第二组缓冲辊,该第一组缓冲辊和第二组缓冲辊分别由第一保持器和第二保持器保持,其中,第一组缓冲辊和第二组缓冲辊在所述第一组缓冲辊和所述第二组缓冲辊之间限定了沿着第一组缓冲辊中的缓冲辊和第二组缓冲辊中的缓冲辊交替地延伸的蜿蜒缓冲路径,其中,方法包括以下步骤:
[0053]-单独地驱动第一组缓冲辊和第二组缓冲辊中的每个缓冲辊。
[0054]
上述方法涉及根据本发明第二方面的贮布装置的实际实施方案,由此具有相同的技术优点,下文中将不再重复。
[0055]
优选地,条带以进入速度进入贮布装置,并以离开速度离开贮布装置,其中,贮布装置的缓冲容量以容量变化速度变化,其中,方法还包括以下步骤:
[0056]-基于进入速度、离开速度、容量变化速度和/或相应缓冲辊在贮布装置内的位置来驱动第一组缓冲辊和第二组缓冲辊中的每个缓冲辊。
[0057]
根据第六方面,本发明提供了一种用于使用贮布装置来缓冲条带的方法,其中,贮布装置包括:第一保持器和第二保持器,该第一保持器和第二保持器能在缓冲方向上朝向彼此和远离彼此移动;以及第一组缓冲辊和第二组缓冲辊,该第一组缓冲辊和第二组缓冲辊分别由第一保持器和第二保持器保持,其中,贮布装置被布置成用于沿着在第一组缓冲辊与第二组缓冲辊之间蜿蜒的缓冲路径来接收条带,其中,条带以进入速度进入贮布装置并且以离开速度离开贮布装置,其中,贮布装置的缓冲容量以容量变化速度变化,其中,方法包括以下步骤:
[0058]-基于进入速度、离开速度、容量变化速度和/或相应缓冲辊在贮布装置内的位置来驱动第一组缓冲辊和第二组缓冲辊中的每个缓冲辊;以及
[0059]-引导一定长度的条带与第一组缓冲辊和第二组缓冲辊中的缓冲辊直接接触地穿过贮布装置。
[0060]
优选地,在不使用相对于缓冲辊支撑该一定长度的条带的支撑层的情况下,引导所述一定长度的条带穿过贮布装置。
[0061]
由于没有衬里,所以缓冲过程可以更便宜和/或更耐用,因为存在更少的浪费。
[0062]
根据第七方面,本发明提供了一种用于使用贮布装置来缓冲条带的方法,其中,贮
布装置包括:第一保持器和第二保持器,该第一保持器和第二保持器能在缓冲方向上朝向彼此和远离彼此相对地移动,以改变贮布装置的缓冲容量;以及第一组缓冲辊和第二组缓冲辊,该第一组缓冲辊和第二组缓冲辊分别由第一保持器和第二保持器保持,其中,第一组缓冲辊和第二组缓冲辊在所述第一组缓冲辊和所述第二组缓冲辊之间限定了沿着第一组缓冲辊中的缓冲辊和第二组缓冲辊中的缓冲辊交替地延伸的蜿蜒缓冲路径,其中,方法包括以下步骤:以不均匀的比率驱动第一保持器与第二保持器相对的移动。
[0063]
上述方法涉及根据本发明第三方面的贮布装置的实际实施方案,由此具有相同的技术优点,下文中将不再重复。
[0064]
优选地,不均匀的比率为至少1.1:1,优选至少1.5:1,最优选至少2:1。
[0065]
在另外的实施方式中,第一保持器在缓冲方向上位于第二保持器上方。
[0066]
在另外的实施方式中,第一保持器和第二保持器在缓冲方向上朝向彼此分别移动到中间位置的相对侧上的第一装载位置和第二装载位置,中间位置在地面上方五十厘米至一百八十厘米范围内的高度处。
[0067]
只要有可能,说明书中描述并示出的各种方面和特征就可以单独应用。这些单独方面,特别是在所附从属权利要求中描述的方面和特征,可以被使得受制于分案专利申请。例如,包括张紧器的实施方式可以根据诸如超长收集器的特征单独应用。
附图说明
[0068]
将基于示意附图所示的示例性实施方式来阐明本发明,附图中:
[0069]
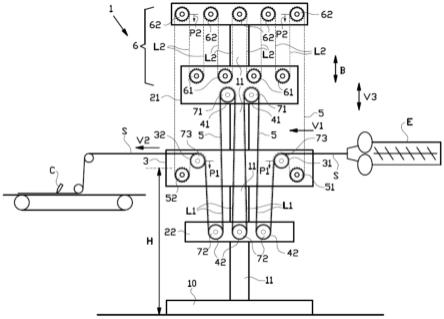
图1示出了包括根据本发明的第一示例性实施方式的贮布装置的生产线的前视图;
[0070]
图2a和图2b分别示出了处于最大容量和最小容量的贮布装置的前视图;
[0071]
图3示出了根据本发明的第二示例性实施方式的另选贮布装置的前视图;
[0072]
图4示出了根据本发明的第三示例性实施方式的另一另选贮布装置的前视图;
[0073]
图5示出了根据图4的另一另选贮布装置的细节的等距视图;
[0074]
图6示出了根据本发明的第四示例性实施方式的另一另选贮布装置的前视图;
[0075]
图7至图12分别示出了根据本发明的第五实施方式、第六实施方式、第七实施方式、第八实施方式、第九实施方式和第十实施方式的另一另选贮布装置的后视图;
[0076]
图13a和图13b分别示出了处于最大容量和最小容量的根据本发明的第十一实施方式的另一另选贮布装置的前视图;以及
[0077]
图14示出了处于最大容量的根据本发明的第十二实施方式的另一另选贮布装置的前视图。
具体实施方式
[0078]
图1示出了生产线的前视图,该生产线包括根据本发明的第一示例性实施方式的贮布装置1、挤出机e和切割机c。挤出机e被布置用于挤出连续的条带s。贮布装置1用于在挤出机e的连续挤出过程与切割机c处的不连续切割过程之间临时积累或缓冲条带s。条带s最终在切割机c处切割成一定长度。定长切割的条带s可以用于轮胎成型。在该示例中,条带s是胶条,该胶条围绕缓冲层的尖锐边缘缠绕或折叠,以防止所述尖锐边缘切入轮胎的其它
部分。
[0079]
如图1所示,贮布装置1包括用于将贮布装置1放置在地面(即工厂地板)上的底座10以及从所述底座10直立的柱或引导件11。贮布装置1还包括第一保持器21和第二保持器22,该第一保持器21和第二保持器22可沿缓冲方向b沿着引导件11彼此相对(即彼此朝向和远离)地移动。第一保持器21和第二保持器22可包括横向于或垂直于缓冲方向b延伸的杆状体。在该示例性实施方式中,缓冲方向b平行于或大致平行于引导件11。优选地,缓冲方向b是竖直的或大致竖直的。
[0080]
贮布装置1设置有分别由第一保持器21和第二保持器22保持或安装到它们的第一组缓冲辊41和第二组缓冲辊42。优选地,第一组缓冲辊41中的缓冲辊以相等的间隔分布在第一保持器21上方。第一组缓冲辊41和第二组缓冲辊42在它们之间限定缓冲路径p1,该缓冲路径蜿蜒,即,在第一组缓冲辊41中的缓冲辊与第二组缓冲辊42中的缓冲辊之间交替地行进或延伸。在图1中,缓冲路径p1用指示缓冲路径p1的起点和终点的箭头示意性地指示。很明显,缓冲路径p1在所述箭头之间延伸,并与由条带s行进穿过贮布装置1的路径一致或大致一致。更特别地,缓冲路径p1包括在第一组缓冲辊41和第二组缓冲辊42中的缓冲辊之间延伸的多个第一线段l1。第一线段l1与其互连的一对缓冲辊双切。更具体地,各个第一线段l1作为第一组缓冲辊41和第二组缓冲辊42中的一对缓冲辊之间的外切线延伸。优选地,第一线段l1大致彼此平行和/或平行于缓冲方向b。
[0081]
贮布装置1还包括中间构件3,该中间构件用于引导条带s进出贮布装置1,即进出缓冲路径p1。中间构件3可包括横向于或垂直于缓冲方向b延伸的杆状体。中间构件3相对于底座10定位,使得中间构件3在地面上方的高度h处延伸,该高度h在五十厘米至一百八十厘米、优选地一百厘米至一百八十厘米、更优选地一百二十厘米至一百六十厘米的范围内。另选地,当中间构件3定位得更高时,平台可用于人体工程学接近。贮布装置1设有进入辊31和离开辊32,该进入辊31和离开辊32由中间构件3保持,以分别将条带s引导进出缓冲路径p1。
[0082]
图2a示出了分别处于第一外部位置和第二外部位置中的第一保持器21和第二保持器22,该第一保持器21和第二保持器22在缓冲方向b上与中间构件3最大地隔开。图2b示出了第一保持器21和第二保持器22分别在缓冲方向b上朝向彼此移动到第一装载位置和第二装载位置之后的情形,该第一装载位置和第二装载位置尽可能靠近中间构件3的相对侧,与其直接相邻和/或位于该相对侧上。在所述装载位置,条带s可以方便地在对于操作者而言符合人体工程学的高度h处沿着缓冲路径p1引导。特别地,操作者不必上下长距离地伸手来将条带s手动装载到贮布装置1中。
[0083]
如图1所示,贮布装置1还包括环形驱动元件5,该环形驱动元件5至少部分地在缓冲路径p1旁边延伸,以驱动第一组缓冲辊41和第二组缓冲辊42中的缓冲辊。换言之,驱动元件5以环路延伸,并且所述环路的至少一部分在缓冲路径p1旁边延伸。驱动元件5具有恒定或大致恒定的长度。贮布装置1设有一个或多个驱动器51、52,该一个或多个驱动器51、52用于使驱动元件5以与条带s相同的速度或大致相同的速度(即,基于条带s在缓冲路径p1的入口和/或出口处的速度和/或基于挤出机e的挤出速度和/或基于条带s在切割机c处的速度)移动通过缓冲路径p1。驱动元件5沿与条带s相同的方向沿着缓冲路径p1运行。驱动元件5然后通过贮布装置1的另一部分返回到缓冲路径p1的起点,以完成环路。
[0084]
在该示例性实施方式中,环形驱动元件5是链条。另选地,可以使用传动带、同步带
等。贮布装置1包括多个缓冲轮71-73,特别是链轮,其与驱动元件5接合以由所述驱动元件5驱动。多个缓冲轮71-73中的每个缓冲轮同轴地安装到第一组缓冲辊41和第二组缓冲辊42中的相应一个缓冲辊或进入辊31和离开辊32中的一个和/或与其一起旋转。特别地,第一组缓冲轮71通过第一保持器21与第一组缓冲辊41同轴地保持。第二组缓冲轮72通过第二保持器22与第二组缓冲辊42同轴地保持。第三组缓冲轮73通过中间构件3与进入辊31和离开辊32同轴地保持。
[0085]
当多个缓冲轮71-73被驱动元件5驱动旋转时,缓冲辊41、42、进入辊31和离开辊32也旋转。多个缓冲轮71-73的直径被选择成以与条带s被支撑在缓冲辊41、42、进入辊31和/或离开辊32上的半径相同或大致相同的半径支撑驱动元件5。两个驱动器51、52优选由两个轮、特别是两个从动链轮形成。
[0086]
条带s以进入速度v1进入贮布装置1(即在进入辊31处),并以离开速度v2离开贮布装置1(即在离开辊32处)。通过沿缓冲方向b相对地移动第一保持器21和第二保持器22,可以改变贮布装置1的缓冲容量。容量变化的速度示意性地用平行于缓冲方向b的速度箭头v3示出。因为驱动元件5沿着条带s的缓冲路径p1行进,并且或多或少地以与条带s相同的方式表现,所以第一组缓冲辊41和第二组缓冲辊42中的各个缓冲辊被驱动的速度等于或大致等于条带s在相应缓冲辊处的速度。换言之,驱动元件5将自动地使第一组缓冲辊41和第二组缓冲辊42中的各个缓冲辊响应于贮布装置1的容量的变化而改变其旋转速度。特别地,第一组缓冲辊41和第二组缓冲辊42中的各个缓冲辊可以响应于进入速度v1、离开速度v2、容量变化速度v3和/或相应缓冲辊在贮布装置1内的位置的变化而由驱动元件5以正确的速度自动驱动。
[0087]
图2a和图2b分别示出了处于最大容量和最小容量的贮布装置1。应当理解,当贮布装置1处于最大容量时的缓冲路径p1的长度显著长于当贮布装置1处于最小容量时的缓冲路径p1的长度。驱动元件5沿着缓冲路径p1行进的长度以相同的量变化,而驱动元件5的总长度保持相同。在贮布装置1的最小容量下,需要临时收集驱动元件5的相当大的超长。为此,贮布装置1设有用于收集和放出(或卸载)驱动元件5的超长(overlength)的超长收集器6。
[0088]
超长收集器6具有的收集器容量足以在贮布装置1的缓冲容量最小时收集环形驱动元件5的整个超长。
[0089]
在该示例性实施方式中,超长收集器6在缓冲方向b上仅位于缓冲路径p1的一侧。在这种特定情况下,超长收集器6在缓冲方向b上位于第一组缓冲辊41的背对第二组缓冲辊42的一侧。换言之,超长收集器6位于缓冲路径p1、第一组缓冲辊41和/或第一保持器21上方,即在贮布装置1的顶端处或附近。这具有的技术优点是,超长仅在贮布装置1的一端处收集。所得到的贮布装置1可以更紧凑和/或更符合人体工程学。特别地,当超长收集器6位于贮布装置1的顶部处或附近时,贮布装置1的缓冲条带s的部分可以更靠近地面。方便地,可以获得中间构件3在地面上方的前述高度h,使得尽管存在超长收集器6,条带s仍可以符合人体工程学地装载到贮布装置1中。
[0090]
另选地,当不需要紧凑的高度和/或符合人体工程学的装载时,超长收集器可以被分开并沿缓冲方向b位于贮布装置1的两侧。
[0091]
如图1中最佳看到的,超长收集器6包括第一组收集器轮61和第二组收集器轮62,
该第一组收集器轮61和第二组收集器轮62在它们之间限定了蜿蜒的收集器路径p2。换言之,收集器路径p2沿着第一组收集器轮61中的轮和第二组收集器轮62中的轮交替地行进或延伸。在图1中,收集器路径p2用指示收集器路径p2的起点和终点的箭头示意性地指示。很明显,收集器路径p2在所述箭头之间延伸,并与由驱动元件5行进穿过超长收集器6的路径一致或大致一致。更特别地,收集器路径p2(类似于缓冲路径p1)包括在第一组收集器轮61和第二组收集器轮62中的收集器轮之间延伸的多个第二线段l2。第二线段l2与其互连的一对收集器轮双切。更具体地,各个第二线段l2作为第一组收集器轮61和第二组收集器轮62中的一对收集器轮之间的外切线延伸。优选地,第二线段l2大致彼此平行和/或平行于缓冲方向b。
[0092]
第一组收集器轮61和第二组收集器轮62优选包括链轮,该链轮可以与链条形式的驱动元件5接合。
[0093]
第一组收集器轮61由第一保持器21保持或安装到该第一保持器。超长收集器6还包括收集器框架60,该收集器框架60布置成在第一保持器21移动的同时在缓冲方向b上保持静止。优选地,收集器框架60在贮布装置1的顶端处或顶端附近安装到引导件11。第二组收集器轮62安装到所述收集器框架60。结果,当第一保持器21沿缓冲方向b移动时,第一组收集器轮61远离或朝向第二组收集器轮62移动。因此,由第一组收集器轮61与第二组收集器轮62之间沿缓冲方向b的相对移动限定驱动元件5在超长收集器6中(即在收集器路径p2中)的长度增加或减小。所述相对移动由第一保持器21沿缓冲方向b的移动产生。相比之下,由第一保持器21和第二保持器22沿缓冲方向b的相对移动限定驱动元件5在缓冲路径p1中的长度增加或减小,因此,第一保持器21与第二保持器22之间的距离在它们各自的相对移动期间的变化是第一保持器21与收集器框架60之间的距离变化的两倍。
[0094]
为了收集由于贮布装置1处于最小容量而产生的所有超长,第一组收集器轮61中的收集器轮的数量是第一组缓冲轮71中的缓冲轮的数量的两倍。另选地表述,第二线段l2的数量是第一线段l1的数量的两倍。因此,当第一保持器21沿缓冲方向b移动时,驱动元件5的长度在第二线段l2的数量上增加或减小,该第二线段的数量是第一线段l1的数量的两倍。这允许收集器路径p2收集驱动元件5的超长(该超长等于或大致等于驱动元件5在贮布装置1处于最小容量时沿着缓冲路径p1延伸的长度的减小量),并且相反地放出或卸载超长(该超长等于或大致等于驱动元件5在贮布装置1朝向最大容量移动时沿着缓冲路径p1延伸的长度的增加量)。换言之,仅利用第一保持器21沿缓冲方向b的一个方向的移动,收集器路径p2可以以与缓冲路径p1由于第一保持器21和第二保持器22沿缓冲方向b的相对移动而减小或增大的量相同的量增大或减小。
[0095]
现在将参考图1、图2a和图2b来简要地讨论使用上述贮布装置1来缓冲条带s的方法。特别地,该方法包括以下步骤:
[0096]-沿着缓冲路径p1引导条带s穿过贮布装置1;
[0097]-利用环形驱动元件5驱动第一组缓冲辊41和第二组缓冲辊42中的每个缓冲辊;
[0098]-通过使第一保持器21和第二保持器22在缓冲方向b上朝向彼此和/或远离彼此移动来改变贮布装置1的缓冲容量;以及
[0099]-响应于缓冲容量的变化,利用超长收集器6收集和/或放出环形驱动元件5的超长。
[0100]
为了沿着缓冲路径p1初始引导条带s穿过贮布装置1,可分别使第一保持器21和第二保持器22沿缓冲方向b朝向彼此移动到第一装载位置和第二装载位置,如图2b所示。随后,可以沿着缓冲路径p1手动引导条带s穿过贮布装置1,同时将第一保持器21和第二保持器22方便地定位于紧邻中间构件3(即在中间构件正上方和正下方)的人体工程学工作高度处。
[0101]
图3示出了根据本发明的第二未要求保护的实施方式的另选贮布装置101,该贮布装置与前述贮布装置1的不同之处在于,第一保持器121可相对于中间构件103移动,而第二保持器122固定。因此,缓冲路径p101的长度增加仅由第一保持器121的移动产生,并且可以用修改的超长收集器106来补偿,其中,收集器路径p102具有与缓冲路径p101相同数量的线段。这种另选的贮布装置101具有比前述贮布装置101小得多的容量。而且,在该实施方式中,操作者必须在中间构件103处或中间构件103附近的装载位置的第一保持器121与固定在贮布装置1的底端附近的第二保持器122之间上下伸手。
[0102]
图6示出了根据本发明第四实施方式的另一另选贮布装置301,该贮布装置与前述贮布装置1、101、201的不同之处在于,其包括多个致动器或驱动器351-357,特别是电动机,以单独地驱动第一组缓冲辊341和第二组缓冲辊342中的缓冲辊。多个驱动器351-357中的每个驱动器由第一保持器321和第二保持器322中的一个保持或安装到该保持器,以直接驱动第一组辊341和第二组辊342中的相应的辊。多个驱动器351-357中的每个驱动器可例如同轴地联接到第一组辊341和第二组辊342中的相应的辊。
[0103]
该另一另选贮布装置301还可包括贮布装置电机312,该贮布装置电机可操作地联接到第一保持器321和第二保持器322,以产生第一保持器321与第二保持器322之间沿缓冲方向b的相对移动。
[0104]
在该示例性实施方式中,第一保持器321和第二保持器322都可沿缓冲方向b朝向彼此和远离彼此相对地移动,以改变贮布装置301的缓冲容量。特别地,第一保持器321和第二保持器322可在缓冲方向b上朝向彼此分别移动到中间位置的相对侧上的第一装载位置和第二装载位置,中间位置在地面上方五十厘米至一百八十厘米、优选地一百厘米至一百八十厘米范围内的高度h处。
[0105]
如图6示意性地示出,贮布装置301还包括控制单元309,该控制单元309电子地和/或可操作地连接到多个驱动器351-357中的每个驱动器。控制单元309被布置、编程、适配或配置成单独地控制多个驱动器351-357中的每个驱动器。更特别地,考虑到条带s以进入速度v1进入另一另选贮布装置301并以离开速度v2离开另一另选贮布装置301,并且另一另选贮布装置301的缓冲容量以容量变化速度v3变化,控制单元309被配置为基于进入速度v1、离开速度v2、容量变化速度v3和/或相应驱动器351-357在贮布装置301内的位置来控制多个驱动器351-357中的每个驱动器。进入速度v1、离开速度v2和容量变化速度v3可以利用合适的传感器(即在进入辊331、离开辊332处)和/或通过测量第一保持器321和第二保持器322中的至少一个的位置来测量或检测。另选地,进入速度v1可从上游工位(即如图1所示的挤出机e)的参数导出,而离开速度v2可从下游工位(即如图1所示的切割机c或施加器)的参数导出。
[0106]
图7至图12分别示出了根据本发明的第五实施方式、第六实施方式、第七实施方式、第八实施方式、第九实施方式和第十实施方式的另一另选贮布装置401、501、601、701、
801、901。另一另选贮布装置401、501、601、701、801、901的特征在于第一保持器421和第二保持器422,该第一保持器421和第二保持器422可以以与前述实施方式中的第一保持器和第二保持器类似的方式沿着框架、柱或引导件411在缓冲方向b上朝向和远离彼此移动。另一另选贮布装置401、501、601、701、801、901也设置有相同的缓冲辊、环形驱动元件、缓冲轮、收集器轮和超长收集器。由于图7至图12中的实施方式集中于沿缓冲方向b向保持器421、422添加张紧力或将张紧力施加到保持器421、422上,所以以简化方式示出了贮布装置401、501、601、701、801、901的其余部分。然而,图7至图12中的实施方式的特征可以应用于前述的各个实施方式。
[0107]
如图7至图12所示的每个另选贮布装置401、501、601、701、801、901均设有张紧器408、508、608、708、808、908,每个张紧器均以其自身的方式沿缓冲方向b将张紧力添加或施加到保持器421、422上。张紧力旨在减轻由环形驱动元件5施加到所述保持器421、422上的驱动力的影响。所述驱动力例如可以由环形驱动元件5与缓冲/收集器轮之间的摩擦和/或由环形驱动元件5自身内产生的动能引起。当这种驱动力超过第一保持器421和/或第二保持器422的质量时,它们可能导致所述保持器421、422中的一个或两个不可预测地移动。
[0108]
所述张紧器408、508、608、708、808、908可以位于相应的贮布装置401、501、601、701、801、901的后侧,以防止干扰条带。
[0109]
图7的另选贮布装置401的特征在于具有张紧元件的张紧器408,该张紧元件特别地为张紧条、张紧链或张紧带480,其由沿着第一保持器421和第二保持器422的多个皮带轮485引导、沿着该多个皮带轮通过或穿绕通过该多个皮带轮。张紧带480的穿绕系数为二。第一保持器421和第二保持器422处的皮带轮485分别连接到所述第一保持器421和所述第二保持器422。在一端处,张紧带480固定,即固定到地面或工厂地板。张紧带480的另一端连接到张力调节构件488、特别是气缸,该张力调节构件可以被控制在张力方向w上缩回或伸出,从而增加或减小张紧带480中的张力和/或补偿当第一保持器421和第二保持器422移动不同的距离时的长度差异。在该示例中,张力方向w平行于或大致平行于缓冲方向b。
[0110]
图8的另选贮布装置501与图7的贮布装置401的不同之处在于,张紧器508包括张紧带580,该张紧带的一端连接到第一保持器421,另一端连接到第二保持器422,同时该张紧带通过沿着连接到所述张力调节构件588的单个皮带轮585运行而联接到张力调节构件588。张紧带580的穿绕系数为一。本实施方式的张力调节构件588可设置有更短的行程。
[0111]
图9的另选贮布装置601与图8的贮布装置501的类似之处在于,张紧器608包括张紧带680,该张紧带的一端连接到第一保持器421,另一端连接到第二保持器422,同时该张紧带通过沿着连接到所述张力调节构件688的单个皮带轮685运行而联接到张力调节构件688。然而,张力调节构件688在横向于或垂直于缓冲方向b的另选张紧方向w’上操作。因此,张紧带680通过多个皮带轮685从缓冲方向b朝向另选张紧方向w’偏转和/或偏转到该另选张紧方向w’中。该实施方式在缓冲方向b上需要较少的空间来容纳张力调节构件688。
[0112]
图10的另选贮布装置701同样类似于图8的贮布装置501,但是其特征在于具有两组部件的双张紧器708,每组包括张紧带781、782、皮带轮785、786和张力调节构件788、789。张紧带781、782可以在隔开的位置处连接到第一保持器421和第二保持器422,以防止另选贮布装置701的歪斜或倾斜。
[0113]
图11的另选贮布装置801也类似于图8的贮布装置501,除了张紧器808具有固定的
安装构件888而不是张力调节构件。固定安装构件888被布置成将皮带轮885相对于工厂地板保持在固定位置。由此,张紧器808具有简化的构造,例如,当第一保持器421和第二保持器422移动相同的距离时,可以使用该构造,该距离的变化分别改变了贮布装置501的容量。因此,张紧带880可以保持在恒定的长度和/或张力。
[0114]
图12的另选贮布装置901也类似于图8的贮布装置501,除了张紧器908具有张力偏置构件988而不是张力调节构件。张力偏置构件988(在该示例中为弹簧)被偏置为拉动皮带轮985,从而沿张紧方向w在张紧带980上施加张紧力。
[0115]
除了图7至图12所示的配置之外,还设想许多其它配置,例如,在不同位置处进行张力调节,诸如水平或竖直地安装在保持器421、422中的一个上。还设想了不同的穿绕配置,例如穿绕系数为一又二分之一,其中一个带终止于框架411上,而另一个终止于保持器421、422中的一个上;或者穿绕系数为四,具有额外的中间偏转皮带轮。
[0116]
另选地,可以向第一保持器421和第二保持器422添加重量,以增加上述张紧力且克服和/或补偿驱动力。
[0117]
前述贮布装置1、101、201、301、401、501、601、701、801、901都具有相同的益处,即,条带s与贮布装置1、101、201、301、401、501、601、701、801、901之间的速度差异以及由此条带s中的张力可以减小到最小。特别地,施加在条带s上的力可以被减小或防止到这样的程度,即,条带s可以在没有衬里(即,与贮布装置1、101、201、301、401、501、601、701、801、901的辊直接接触)的情况下引导通过贮布装置1、101、201、301、401、501、601、701、801、901。这对于薄的或热的条带(诸如用于轮胎成型的胶条)是特别相关的,因为所述条带可能容易地变形。由于没有衬里,所以缓冲过程更便宜且更耐用,因为存在更少的浪费。
[0118]
图13a和图13b示出了根据本发明第十一实施方式的另一另选贮布装置1001,该贮布装置与根据本发明第一方面的贮布装置1的类似之处在于,其保持器1021、1022可以不同的移动速率、速度移动和/或在缓冲方向b上移动不同的距离。换言之,保持器1021、1022中的一个可以比保持器1021、1022中的另一个更快地移动。特别地,保持器1021、1022可以以不均匀的比率移动。
[0119]
如图13b所示,另一另选贮布装置1001包括底座1010和从底座1010竖立的引导件1011,该引导件用于引导保持器1021、1022在缓冲方向b上的相应移动m1、m2。每个保持器1021、1022被配置用于以类似于前述贮布装置1、101、201、301、401、501、601、701、801、901的方式保持一组缓冲辊1041、1042,以限定用于条带s的蜿蜒缓冲路径p1。另一另选贮布装置1001还包括保持器驱动器1012,该保持器驱动器可操作地或功能性地联接至第一保持器1021和第二保持器1022,用于驱动它们的相对移动m1、m2。在该示例中,保持器驱动器1012包括形成皮带和皮带轮系统的皮带1013和多个皮带轮1014、1015、1019、1020。第一保持器1021经由第一联接器1017联接到皮带1013的一部分。第二保持器1022经由第二联接器1018联接到皮带1013的两个或更多个部分。
[0120]
在该示例中,多个皮带轮1014、1015、1019、1020包括布置在引导件1011的上端处的上皮带轮1014、布置在引导件1011的下端处、底座1010处或附近的下皮带轮1015、以及移动或可移动的皮带轮1019、1020,皮带1013沿着皮带轮1019、1020穿绕,并且皮带轮1019、1020可在缓冲方向b上移动。可移动的皮带轮1019、1020都由第二联接器1018承载或连接到该第二联接器1018。皮带轮1014、1015、1019、1020中的一个(在该特定示例中为上皮带轮
1014)由电机1016驱动,以旋转并驱动皮带1013。皮带1013可以是同步带或链条。
[0121]
如图所示的皮带和皮带轮系统的穿绕系数为二,这意味着第二保持器1022联接到皮带1013的两个部分和/或由其驱动。因此,第二保持器1022的移动速度比联接到皮带1013的单个部分和/或由其驱动的第一保持器1021慢一半。换言之,第一保持器1021可以以快两倍的速度移动。因此,可以获得2:1的第一保持器1021和第二保持器1022的移动m1、m2之间的不均匀的比率。
[0122]
因此,如图13a所示,第一保持器1021和第二保持器1022可在缓冲方向b上朝向彼此分别移动到中间位置的相对侧上的第一装载位置和第二装载位置,中间位置在地面上方符合人体工程学的高度h处,特别是在五十厘米至一百八十厘米范围内的高度h处。
[0123]
图14示出了根据本发明的第十二实施方式的另一另选贮布装置2001,该贮布装置与根据本发明的第十一方面的另一另选贮布装置1001的不同之处在于,保持器驱动器2012包括第一电机2016和第二电机2017,该第一电机2016和第二电机2017用于分别沿缓冲方向b移动第一保持器2021和第二保持器2022。另一另选贮布装置2001还包括控制单元2009,该控制单元电子地、功能性地和/或可操作地连接至第一电机2016和第二电机2017,以控制上述不均匀的比率的移动m1、m2。电机2016、2017可以是线性电机、伺服电机或能够使保持器2021、2022沿缓冲方向b移动的任何其它类型的电机。
[0124]
应理解,上面的描述被包括来例示优选实施方式的操作,并不旨在限制本发明的范围。从上面的讨论,本发明的范围仍然包含的许多变型例将对本领域技术人员显而易见。
[0125]
附图标记的列表
[0126]
1贮布装置
[0127]
10底座
[0128]
11引导件
[0129]
21第一保持器
[0130]
22第二保持器
[0131]
3中间构件
[0132]
31进入辊
[0133]
32离开辊
[0134]
41第一组缓冲辊
[0135]
42第二组缓冲辊
[0136]
5环形驱动元件
[0137]
51第一驱动器
[0138]
52第二驱动器
[0139]
6超长收集器
[0140]
60收集器框架
[0141]
61第一组收集器轮
[0142]
62第二组收集器轮
[0143]
71第一组缓冲轮
[0144]
72第二组缓冲轮
[0145]
73第三组缓冲轮
[0146]
101另选贮布装置
[0147]
201另一另选贮布装置
[0148]
221第一保持器
[0149]
222第二保持器
[0150]
203中间构件
[0151]
251第一驱动元件
[0152]
252第二驱动元件
[0153]
253第三驱动元件
[0154]
254第四驱动元件
[0155]
255第五驱动元件
[0156]
301另一另选贮布装置
[0157]
312贮布装置电机
[0158]
321第一保持器
[0159]
322第二保持器
[0160]
331进入辊
[0161]
332离开辊
[0162]
341第一组缓冲辊
[0163]
342第二组缓冲辊
[0164]
351-357驱动器
[0165]
309控制单元
[0166]
401另一另选贮布装置
[0167]
408张紧器
[0168]
480张紧带
[0169]
485皮带轮
[0170]
488张力调节构件
[0171]
501另一另选贮布装置
[0172]
508张紧器
[0173]
580张紧带
[0174]
585皮带轮
[0175]
588张力调节构件
[0176]
601另一另选贮布装置
[0177]
608张紧器
[0178]
680张紧带
[0179]
685皮带轮
[0180]
688张力调节构件
[0181]
701另一另选贮布装置
[0182]
708张紧器
[0183]
781第一张紧带
[0184]
782第二张紧带
[0185]
785第一皮带轮
[0186]
786第二皮带轮
[0187]
788第一张力调节构件
[0188]
789第二张力调节构件
[0189]
801另一另选贮布装置
[0190]
808张紧器
[0191]
880张紧带
[0192]
885皮带轮
[0193]
888安装构件
[0194]
901另一另选贮布装置
[0195]
908张紧器
[0196]
980张紧带
[0197]
985皮带轮
[0198]
988张力偏置构件
[0199]
1001另一另选贮布装置
[0200]
1010底座
[0201]
1011引导件
[0202]
1012保持器驱动器
[0203]
1013传动带
[0204]
1014上皮带轮
[0205]
1015下皮带轮
[0206]
1016电机
[0207]
1017第一联接器
[0208]
1018第二联接器
[0209]
1019第一可移动皮带轮
[0210]
1020第二可移动皮带轮
[0211]
1021第一保持器
[0212]
1022第二保持器
[0213]
1041第一组缓冲辊
[0214]
1042第二组缓冲辊
[0215]
2001另一另选贮布装置
[0216]
2016第一电机
[0217]
2017第二电机
[0218]
2021第一保持器
[0219]
2022第二保持器
[0220]
2009控制单元
[0221]
b缓冲方向
[0222]
c切割机
[0223]
e挤出机
[0224]
h高度
[0225]
l1第一线段
[0226]
l2第二线段
[0227]
m1第一保持器移动
[0228]
m2第二保持器移动
[0229]
p1缓冲路径
[0230]
p2收集器路径
[0231]
p101缓冲路径
[0232]
p102收集器路径
[0233]
s条带
[0234]
v1进入速度
[0235]
v2离开速度
[0236]
v3容量变化速度
[0237]
w张力调节方向
[0238]
w’另选张力调节方向
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1