一种管状或棒状物料竖立及搬运机的制作方法
1.本发明涉及管状或棒状物料竖立及搬运技术领域,尤其涉及一种管状或棒状物料竖立及搬运机。
背景技术:
2.目前市场上大多采用人工搬运的方式把管状或圆形棒料给竖立起来,或者通过叉车的方式把管状或圆形棒料托运到指定的位置,然后在把棒料给竖立起来;通过传统的方式搬运竖立管状或圆形棒料,会增加工人的劳动强度;并且对于太重管状或圆形棒料的搬运,有时会误伤搬运人员;而采用普通的设备装置搬运管状或圆形棒料;因管状或圆形棒料本身的特点会使得在搬运过程中出现不稳定性;有时同样会给操作人员造成伤害;对于市场上有的管状或圆形棒料竖立及搬运机因成本过高的原因,也不宜被人们所接受。
3.传统的管状或圆形棒料竖立及搬运工具搬运效率不高、不能够根据需要调倾斜度,特别是市场上缺少针对金属管状或圆形棒料的特性进行合理设计,缺少既能满足普通管状或圆形棒料的搬运需求又具有搬运金属管状或圆形棒料的特色优势的竖立及搬运机。
技术实现要素:
4.本发明所要解决的技术问题,是针对上述存在的技术不足,提供了管状或棒状物料竖立及搬运机。
5.为解决上述技术问题,本发明所采用的技术方案是:一种管状或棒状物料竖立及搬运机包括固定支架机构、传动机构、夹紧机构。
6.固定支架机构包括第一支撑横板、第一支撑竖板、第一支撑斜板、第二支撑竖板、第二支撑横板、第三支撑横板、第一固定孔位、第二固定孔位、第三支撑竖板、第一连接侧板、第二连接侧板、第三连接侧板、第四连接侧板;第一支撑横板和第一支撑竖板焊接一块;并且第一支撑横板和第一支撑竖板分别中心拼焊。
7.第一支撑横板和第一支撑竖板的相交焊接出的上方焊接有第二支撑竖板;第二支撑竖板的上端焊接有第三支撑横板;第一支撑斜板分别和第一支撑横板、第一支撑竖板和第二支撑竖板焊接一块;第二支撑横板与第二支撑竖板分别焊接;并且第二支撑横板在与第二支撑竖板的焊接高度与第一支撑斜板在第二支撑竖板的焊接高度一致;第三支撑横板上设置有第二固定孔位;第二支撑横板上设置有第一固定孔位;第一支撑竖板上设置有第三固定孔位;第二固定孔位、第一固定孔位、第三固定孔位内部安装有第二轴承。
8.第一支撑竖板上分别对称焊接有第三支撑竖板;并且第三支撑竖板在第一支撑竖板上焊接的位置与第一支撑斜板在第一支撑竖板上焊接的位置紧贴和;其中一个第三支撑竖板上方分别配合安装有第一连接侧板和第二连接侧板;另一个第三支撑竖板上方分别配合安装有第三连接侧板和第四连接侧板;第一支撑横板的两端配合安装有地脚调整装置;当本设计装置到达操作工作场地时,通过调整地脚调整装置使得所述管状或棒状物料竖立及搬运机整体平衡稳定,解决提升棒柱时出现过度的颤动性,并保证上下移动大板自由伸
缩。
9.第一连接侧板和第四连接侧板的中部镶嵌有第三轴承,第三连接侧板和第四连接侧板的中部也镶嵌有第三轴承; 第一滚珠丝杠的两端通过第三轴承固定;第一滚珠丝杠的一端还与设置在第三连接侧板和第四连接侧板之间的第一小齿轮连接;第一小齿轮与第三连接侧板、第四连接侧板之间的第一大齿轮啮合。
10.第一大齿轮与伺服电机的电机轴连接,第一大齿轮通过伺服电机驱动;伺服电机通过螺栓固定在第三连接侧板上。
11.第三支撑竖板的内侧位置分别对称设置有两个下部大连板;两个下部大连板相对于第一连接侧板、第二连接侧板、第三连接侧板和第四连接侧板垂直。
12.两个下部大连板两端的内部分别有第一固定轴、第一转动轴和第二转动轴;第一固定轴固定在两个下部大连板的中部;第一固定轴的两端靠近中部设置有第一锁套;第一转动轴和第二转动轴贯穿于两个大连板两端的开有的通孔;下部大连板一端的大滚轮中部贯穿有第一转动轴;下部大连板另一端的大滚轮中部贯穿有第二转动轴;大滚轮的中部分别镶嵌有第一轴承;第一转动轴的中部贯穿有托盘架;托板架的厚板的后部设置有挂钩小块;第一锁套和挂钩小块通过大扭矩弹簧连接;第一转动轴两端的靠近中心位置设置有第一梯台盘;第二转动轴的两端靠近中心位置设置有第二梯台盘;锁母的中心分别贯穿有第一转动轴和第二转动轴;锁母位于大滚轮的外侧安装。
13.两根第二滚珠丝杠垂直设置在固定支架机构上;第二滚珠丝杠上端通过第二固定孔位内的第二轴承活动固定在第三支撑横板上;第二滚珠丝杠中部穿过上下移动大板的中部后通过第一固定孔位内的第二轴承活动固定在第二支撑横板上;第二滚珠丝杠下部通过第三固定孔位内的第二轴承活动固定在第一支撑横板上。
14.两根第二滚珠丝杠上安装有齿轮安装台,齿轮安装台设置在第二支撑横板上沿,两个齿轮安装台上分别安装有一个第二大齿轮,两个第二大齿轮的共同啮合第一滚珠丝杠。
15.下部大连板的内部分别安装有齿条,齿条和第二小齿轮啮合;第二小齿轮安装在第一支撑横板和和第二支撑横板之间的第二滚珠丝杠上,并由第二滚珠丝杠驱动。
16.上下移动大板的凸台上部焊接有电机固定侧板;贯穿电机通过螺栓和电机固定侧板安装固定;上下移动大板一侧的竖相面螺栓连接有前端横板;前端横板的末端焊接有第二薄竖板;第二薄横板分别和第二薄竖板焊接一块;第二薄横板的竖向面和横向面分别和第二薄竖板的竖向面和横向面对齐。
17.前端横板另一端靠近第二薄竖板方向焊接有第一薄竖板;第一薄横板与第一薄竖板分别焊接;并且第一薄横板的竖直面和第一薄竖板的竖直面对齐;第一薄横板的横向面和第一薄竖板的横向面对齐;两个第一薄竖板距离中部同样焊接有第一薄横板。
18.第二薄横板上端的中部镶嵌有丝母;丝母用于将夹紧块安装在第一薄横板上。
19.两个夹紧块的末端配合安装有连块,连块为椭圆体;贯穿电机的电机轴穿过电机固定侧板和第二薄横板后连接连块的中心位置,并驱动连块转动;连块转动能够控制两个夹紧块打开的角度,进而能够根据需要夹住棒柱。
20.所述的前端横板的内侧镶嵌安装有第二轴承,旋转滚筒的主轴安装在前端横板上第一轴承内;旋转滚筒的主轴通过螺母固定;螺母位于前端横板的外侧;旋转滚筒上开设有
卡槽;棒柱固定在托盘架上时,棒柱斜靠在旋转滚筒上。
21.进一步的优化本技术方案,前端横板的其中一侧的内部还设置有驱动电机,驱动电机和主轴连接以驱动旋转滚筒旋转,第二轴承安装在旋转滚筒和驱动电机之间以固定旋转滚筒。
22.设置有控制器和蓄电池;控制器与伺服电机、贯穿电机、驱动电机和所述的一种管状或棒状物料竖立及搬运机上含有的其它电控设备电连接,并进行控制;蓄电池为所述的一种管状或棒状物料竖立及搬运机上含有的所有电子设备供电。
23.所述的控制器及相关控制电路、控制策略均采用现有技术,其为本技术领域的人熟知,这里不再赘述;蓄电池为本装置中电子设备供电的电路和相关策略也均采用现有技术,其为本技术领域的人熟知,这里不再赘述。
24.上下移动大板处于其能够到达的第二滚珠丝杠上最高位置时,齿条靠近第一固定轴的一端刚好与第二小齿轮接触,下部大连板处于向后收缩的极限状态;当伺服电机运转使带齿条的下部大连板向前运动时,第二滚珠丝杠正好驱动上下移动大板向下运动;齿条靠近第二转动轴的一端刚好与第二小齿轮接触时,下部大连板处于向前伸展的极限状态,此时,上下移动大板处于其能够到达的第二滚珠丝杠上最低位置。
25.进一步的优化技术方案,所述的旋转滚筒内部设置有电磁铁块,电磁铁块不少于四块,且电磁铁块均匀分布在以主轴为中心的旋转滚筒上;所述的前端横板上未安装驱动电机的一侧内部设置有电环,电环设置中旋转滚筒与第二轴承之间。
26.所述的电环上设置有正极端、轴孔、负极端、阶梯台;正极端、负极端为两个同心电极凸环,且电连接到外部控制器;旋转滚筒与电环连接一侧设置有正极槽、负极槽,正极槽、负极槽为两个同心的电极凹槽;旋转滚筒的主轴穿过轴孔,正极端插入正极槽,负极端插入负极槽,阶梯台贴合到旋转滚筒设置有负极槽,正极槽的侧面;电环与第二轴承固定在前端横板内部保持不动,旋转滚筒旋转过程中正极槽、负极槽始终分别与正极端、负极端滑动接触实现导通为电磁铁块供电。
27.所述的正极端、负极端上设置有电极片,电极片覆盖在正极端或负极端的环面上,且不覆盖面积不超过环面的一半。
28.所述的正极槽、负极槽的环面上均覆盖有导电片,正极槽上的导电片、负极槽的导电片一一对应排列组成一个包含正极、负极的导电组;导电组的数量均与电磁铁块的数量一致;每一个导电组的正极、负极分别与一个电磁铁块的正极、负极电连接;旋转滚筒旋转过程中,电磁铁块的正极、负极通过导电片依次与正极端和负极端上的电极片接触实现通电,进而让每个电磁铁块交替通电实现工作。
29.电环安装好的状态下,正极槽、负极槽环面覆盖的导电片处于旋转滚筒靠近棒柱一侧,以保证旋转滚筒旋转过程中,通过控制器打开电磁铁块后总是保证能让靠近棒柱一侧的电磁铁块打开,这样能够让旋转滚筒随旋转方向施加金属的棒柱引力,进而将金属的棒柱向上推。
30.进一步的优化本技术方案,所述的地脚调整装置采用电动伸缩杆控制伸缩,当本设计装置到达操作工作场地时,通过调整地脚调整装置使得整体装置平衡稳定,解决了提升棒柱时出现过度的颤动性,并保证上下移动大板自由伸缩。
31.进一步的优化本技术方案,所述的每个大滚轮上设置有独立的驱动电机,用电机
驱动实现前进、后退、转弯。
32.进一步的优化技术方案,所述的托盘架内部设置有电磁铁,电磁铁电连接控制器,通过控制器按需控制电磁铁打开或关闭;在搬运金属的棒柱时打开电磁铁能够让托盘架紧紧拖住金属的棒柱。
33.进一步的优化技术方案,两个夹紧块内部设置有电磁铁,电磁铁电连接控制器,通过控制器按需控制电磁铁打开或关闭;需要将金属的棒柱紧紧的固定在夹紧块内部时,打开电磁铁能够让夹紧块紧紧夹住金属的棒柱。
34.进一步的优化技术方案,所述的旋转滚筒中部设有向内凹陷的弧,以方便棒柱倚靠。
35.与现有技术相比,本发明具有以下优点:为了实现棒柱的竖立目的时,通过控制器控制本发明中的地脚调整装置、伺服电机、电磁铁块、驱动电机、贯穿电机、两个夹紧块内部的电磁铁、盘架内部的电磁铁协同工作实现棒柱的竖立后,通过控制贯穿电机工作松开棒柱,把棒柱竖立在指定位置,此时上下移动大板处于第二滚珠丝杠上的高位,齿条靠近第一固定轴的一端与第二小齿轮接触或距离最近,下部大连板处于向后收缩状态,工作完成;如果是竖立或者搬运金属的棒柱,该过程中可以按需通过控制器控制两个夹紧块内部的电磁铁、盘架内部的电磁和电磁铁块打开或者关闭;为了实现棒柱的搬运目的时,通过控制器控制本发明中的地脚调整装置、伺服电机、电磁铁块、驱动电机、贯穿电机、两个夹紧块内部的电磁铁、盘架内部的电磁铁协同工作并将棒柱搬运到指定位置后,如果需要将棒柱放平,则通过控制器控制伺服电机运转让第二滚珠丝杠驱动上下移动大板向下运动,同时由于齿条与第二滚珠丝杠的运动是关联的,带有齿条的下部大连板向前运动,协同将棒柱放下,接着通过控制贯穿电机工作松开棒柱;如果是竖立或者搬运金属的棒柱,该过程中可以按需通过控制器控制两个夹紧块内部的电磁铁、盘架内部的电磁和电磁铁块打开或者关闭。
36.特别的,其具明显有益效果至少包括如下15点。
37.1、通过采用可移动的旋转大滚轮,使得本设计的整体装置便于灵活移动的操作位置,并且通过地脚调整装置可以保证本设计的装置在使用时的稳定性,解决了传统管状或棒状物料竖立及搬运机械在提升棒料时出现过度的颤动性。
38.2、所述的地脚调整装置采用电动伸缩杆控制伸缩,调节更方便。
39.3、由于所述的每个大滚轮上设置有独立的驱动电机,用电机驱动实现前进、后退、转弯,因此设计装置到操作的工作场地或者转场都很方便。
40.4、通过前端安装托盘架一面是倾斜的特点,更有利于插入到搬运的棒料下方,并且通过大扭矩弹簧拉伸托盘架、旋转滚筒上设置的卡遭配合,当旋转滚筒旋转运动时,因大的摩擦力会把棒料逐渐的运动提升。
41.5、通过夹紧块把提升上去的棒料牢牢的锁死,避免了因普通的棒料运输装置在搬运过程中的不稳定性,而对操作人员造成误伤的问题。
42.6、本设计装置采用螺杆和齿轮、齿条的配合,保证了在搬运过程中不会出现打滑现象。
43.7、两根第二滚珠丝杠(217)上安装有齿轮安装台(226),齿轮安装台(226)设置在
第二支撑横板(105)上沿,两个齿轮安装台(226)上分别安装有一个第二大齿轮(225),两个第二大齿轮(225)的共同啮合第一滚珠丝杠(210),第一小齿轮与第一大齿轮啮合,第一大齿轮通过伺服电机驱动,下部大连板(208)的内部分别安装有齿条(220),齿条(220)和第二小齿轮(224)啮合,第二小齿轮(224)安装在第二滚珠丝杠(210)上。因此通过控制器控制伺服电机运转,能够协调控制带齿条的下部大连板向前运动的同时下移动大板向下运动,控制带齿条的下部大连板向后运动的同时下移动大板向上运动,实现竖立或搬运目的。其方式与其它类似机械完全不同。
44.8、因在第一转动轴贯穿托盘架的交叉中部,托盘架的一面上挂钩小块通过大扭矩弹簧和第一锁套连接固定,托盘架交叉出开设的通孔内径大于第一转动轴,当第一转动轴旋转运动时不会带动托盘架一块旋转运动,托盘架其中另一面是倾斜面,可以很轻松的插到有间隙的棒柱下方,同时和旋转滚筒的配合,所以很轻松的抬起搬运的棒柱。该结构实现了托盘架与其它机构的整体协同统一,整体效果其它类似的机械无法实现。
45.9、设置了旋转滚筒,可以根据需要通过控制器控制旋转滚筒旋转,让进而帮助棒柱竖立或者倾斜。
46.10、如果遇到较长的棒柱时,通过控制器控制旋转滚筒和夹紧块配合工作,能够让旋转滚筒带动棒柱向上滑动,以实现更好工作。
47.11、如果遇到金属的棒柱,通过控制器控制控制旋转滚筒上的电磁铁块,让靠近棒柱一侧的电磁铁块保持打开,这样能够让旋转滚筒随旋转方向施加金属的棒柱引力,进而将金属的棒柱向上推。
48.12、由于所述的旋转滚筒内部设置有电磁铁块,电磁铁块不少于四块,且电磁铁块均匀分布在以主轴为中心的旋转滚筒上;所述的前端横板上未安装驱动电机的一侧内部设置有电环,电环设置中旋转滚筒与第二轴承之间,且电环采用独特的设计保证了电磁铁块能够按需工作,在搬运金属的棒柱时能够给以金属的棒柱向上的力,帮助金属的棒柱向上移动、竖立或倾斜。
49.13、所述的托盘架内部设置有电磁铁,电磁铁电连接控制器,通过控制器按需控制电磁铁打开或关闭;在搬运金属的棒柱时打开电磁铁能够让托盘架紧紧拖住金属的棒柱。
50.14、两个夹紧块内部设置有电磁铁,电磁铁电连接控制器,通过控制器按需控制电磁铁打开或关闭;需要将金属的棒柱紧紧的固定在夹紧块内部时,打开电磁铁能够让夹紧块紧紧夹住金属的棒柱。
51.15、所述的旋转滚筒中部设有向内凹陷的弧,以方便棒柱倚靠。
附图说明
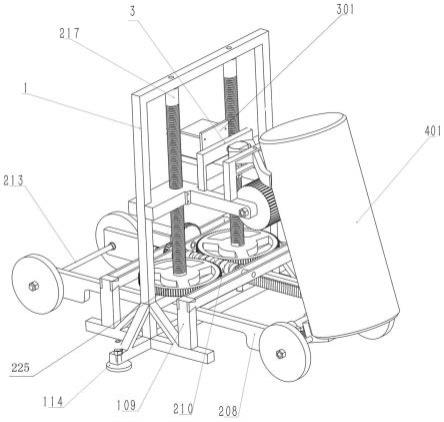
52.图1、图2为一种管状或棒状物料竖立及搬运机整体结构视图。
53.图3为一种管状或棒状物料竖立及搬运机局部机构示意图。
54.图4为一种管状或棒状物料竖立及搬运机固定支架机构示意图。
55.图5为一种管状或棒状物料竖立及搬运机中贯穿电机和连块的连接及结构示意图。
56.图6为一种管状或棒状物料竖立及搬运机中旋转滚筒未安装有电磁铁块和电环时,旋转滚筒与第二轴承、驱动电机连接及结构示意图。
57.图7为一种管状或棒状物料竖立及搬运机中旋转滚筒安装有电磁铁块和电环时,旋转滚筒与第二轴承、驱动电机、电环连接及结构示意图。
58.图8、图9、图10为一种管状或棒状物料竖立及搬运机中旋转滚筒安装有电磁铁块和电环时,旋转滚筒结构、旋转滚筒上电磁铁块的位置及结构、旋转滚筒与电环安装位置及结构示意图。
59.图11、图12、图13为一种管状或棒状物料竖立及搬运机中电环结构示意图。
60.图14为一种管状或棒状物料竖立及搬运机中旋转滚筒未安装有电磁铁块和电环时,旋转滚筒中部设有向内凹陷的弧的结构示意图。
61.图15为一种管状或棒状物料竖立及搬运机中旋转滚筒安装有电磁铁块和电环时,旋转滚筒中部设有向内凹陷的弧的结构示意图。
62.图中各附图标记依次表示为:1、固定支架机构;2、传动机构;3、夹紧机构;401、棒柱;101、第一支撑横板;102、第一支撑竖板;103、第一支撑斜板;104、第二支撑竖板;105、第二支撑横板;106、第三支撑横板;107、第一固定孔位;108、第二固定孔位;109、第三支撑竖板;110、第一连接侧板;111、第二连接侧板;112、第三连接侧板;113、第四连接侧板;114、地脚调整装置;115、第三固定孔位;201、第一转动轴;202、第一梯台盘;203、第一轴承;204、托盘架;205、第一固定轴;206、大滚轮;207、第二轴承;208、下部大连板;209、第三轴承;210、第一滚珠丝杠;211、第一小齿轮;212、锁母;213、第二转动轴;214、第二梯台盘;215、伺服电机;216、第一大齿轮;217、第二滚珠丝杠;218、贯穿电机;219、丝母;220、齿条;221、第一锁套;222、大扭矩弹簧;223、挂钩小块;224、第二小齿轮;225、第二大齿轮;226、齿轮安装台;301、电机固定侧板;302、第一薄横板;303、第一薄竖板;304、夹紧块;305、旋转滚筒;306、卡槽;307、第二薄横板;308、上下移动大板;309、第二薄竖板;310、连块;311、前端横板;312、主轴;313、电环;314、驱动电机;315、电磁铁块;316、正极槽;317、负极槽;318、正极端;319、轴孔;320、负极端;321、阶梯台;322、电极片;323、导电片。
63.具体实施方式
64.为使本发明的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本发明进一步详细说明。应该理解,这些描述只是示例性的,而并非要限制本发明的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本发明的概念。
65.具体实施方式一:结合图1-4所示:一种管状或棒状物料竖立及搬运机包括固定支架机构1、传动机构2、夹紧机构3;固定支架机构1包括第一支撑横板101、第一支撑竖板102、第一支撑斜板103、第二支撑竖板104、第二支撑横板105、第三支撑横板106、第一固定孔位107、第二固定孔位108、第三支撑竖板109、第一连接侧板110、第二连接侧板111、第三连接侧板112、第四连接侧板113;第一支撑横板101和第一支撑竖板102焊接一块;并且第一支撑横板101和第一支撑竖板102分别中心拼焊;第一支撑横板101和第一支撑竖板102的相交焊接出的上方焊接有第二支撑竖板104;第二支撑竖板104的上端焊接有第三支撑横板106;第一支撑斜板103分别和第一支撑
横板101、第一支撑竖板102和第二支撑竖板104焊接一块;第二支撑横板105与第二支撑竖板104分别焊接;并且第二支撑横板105在与第二支撑竖板104的焊接高度与第一支撑斜板103在第二支撑竖板104的焊接高度一致;第三支撑横板106上设置有第二固定孔位108;第二支撑横板105上设置有第一固定孔位107;第一支撑竖板102上设置有第三固定孔位115;第二固定孔位108、第一固定孔位107、第三固定孔位115内部安装有第二轴承207;第一支撑竖板102上分别对称焊接有第三支撑竖板109;并且第三支撑竖板109在第一支撑竖板102上焊接的位置与第一支撑斜板103在第一支撑竖板102上焊接的位置紧贴和;其中一个第三支撑竖板109上方分别配合安装有第一连接侧板110和第二连接侧板111;另一个第三支撑竖板109上方分别配合安装有第三连接侧板112和第四连接侧板113;第一支撑横板101的两端配合安装有地脚调整装置114;当本设计装置到达操作工作场地时,通过调整地脚调整装置114使得所述管状或棒状物料竖立及搬运机整体平衡稳定,解决提升棒柱401时出现过度的颤动性,并保证上下移动大板308自由伸缩;第一连接侧板110和第四连接侧板113的中部镶嵌有第三轴承209,第三连接侧板112和第四连接侧板113的中部也镶嵌有第三轴承209; 第一滚珠丝杠210的两端通过第三轴承209固定;第一滚珠丝杠210的一端还与设置在第三连接侧板112和第四连接侧板113之间的第一小齿轮211连接;第一小齿轮211与第三连接侧板112、第四连接侧板113之间的第一大齿轮216啮合;第一大齿轮216与伺服电机215的电机轴连接,第一大齿轮216通过伺服电机215驱动;伺服电机215通过螺栓固定在第三连接侧板112上;第三支撑竖板109的内侧位置分别对称设置有两个下部大连板208;两个下部大连板208相对于第一连接侧板110、第二连接侧板111、第三连接侧板112和第四连接侧板113垂直;两个下部大连板208两端的内部分别有第一固定轴205、第一转动轴201和第二转动轴213;第一固定轴205固定在两个下部大连板208的中部;第一固定轴205的两端靠近中部设置有第一锁套221;第一转动轴201和第二转动轴213贯穿于两个大连板两端的开有的通孔;下部大连板208一端的大滚轮206中部贯穿有第一转动轴201;下部大连板208另一端的大滚轮206中部贯穿有第二转动轴213;大滚轮206的中部分别镶嵌有第一轴承203;第一转动轴201的中部贯穿有托盘架204;托板架的厚板的后部设置有挂钩小块223;第一锁套221和挂钩小块223通过大扭矩弹簧222连接;第一转动轴201两端的靠近中心位置设置有第一梯台盘202;第二转动轴213的两端靠近中心位置设置有第二梯台盘214;锁母212的中心分别贯穿有第一转动轴201和第二转动轴213;锁母212位于大滚轮206的外侧安装;两根第二滚珠丝杠217垂直设置在固定支架机构1上;第二滚珠丝杠217上端通过第二固定孔位108内的第二轴承270活动固定在第三支撑横板106上;第二滚珠丝杠217中部穿过上下移动大板308的中部后通过第一固定孔位107内的第二轴承270活动固定在第二支撑横板105上;第二滚珠丝杠217下部通过第三固定孔位115内的第二轴承270活动固定在第一支撑横板101上;两根第二滚珠丝杠217上安装有齿轮安装台226,齿轮安装台226设置在第二支撑横板105上沿,两个齿轮安装台226上分别安装有一个第二大齿轮225,两个第二大齿轮225的共同啮合第一滚珠丝杠210;
下部大连板208的内部分别安装有齿条220,齿条220和第二小齿轮224啮合;第二小齿轮224安装在第一支撑横板和101和第二支撑横板105之间的第二滚珠丝杠210上,并由第二滚珠丝杠210驱动;上下移动大板308的凸台上部焊接有电机固定侧板301;贯穿电机218通过螺栓和电机固定侧板301安装固定;上下移动大板308一侧的竖相面螺栓连接有前端横板311;前端横板311的末端焊接有第二薄竖板309;第二薄横板307分别和第二薄竖板309焊接一块;第二薄横板307的竖向面和横向面分别和第二薄竖板309的竖向面和横向面对齐;前端横板311另一端靠近第二薄竖板309方向焊接有第一薄竖板303;第一薄横板302与第一薄竖板303分别焊接;并且第一薄横板302的竖直面和第一薄竖板303的竖直面对齐;第一薄横板302的横向面和第一薄竖板303的横向面对齐;两个第一薄竖板303距离中部同样焊接有第一薄横板302;第二薄横板307上端的中部镶嵌有丝母219;丝母219用于将夹紧块304安装在第一薄横板302上;两个夹紧块304的末端配合安装有连块310,连块310为椭圆体;贯穿电机218的电机轴穿过电机固定侧板301和第二薄横板307后连接连块310的中心位置,并驱动连块310转动;连块310转动能够控制两个夹紧块304打开的角度,进而能够根据需要夹住棒柱401;所述的前端横板311的内侧镶嵌安装有第二轴承207,旋转滚筒305的主轴312安装在前端横板311上第一轴承203内;旋转滚筒305的主轴312通过螺母固定;螺母位于前端横板311的外侧;旋转滚筒305上开设有卡槽306;棒柱401固定在托盘架204上时,棒柱401斜靠在旋转滚筒305上;进一步的优化本技术方案,前端横板311的其中一侧的内部还设置有驱动电机314,驱动电机314和主轴312连接以驱动旋转滚筒305旋转,第二轴承207安装在旋转滚筒305和驱动电机314之间以固定旋转滚筒305;设置有控制器和蓄电池;控制器与伺服电机215、贯穿电机218、驱动电机314和所述的一种管状或棒状物料竖立及搬运机上含有的其它电控设备电连接,并进行控制;蓄电池为所述的一种管状或棒状物料竖立及搬运机上含有的所有电子设备供电;所述的控制器及相关控制电路、控制策略均采用现有技术,其为本技术领域的人熟知,这里不再赘述;蓄电池为本装置中电子设备供电的电路和相关策略也均采用现有技术,其为本技术领域的人熟知,这里不再赘述;上下移动大板308处于其能够到达的第二滚珠丝杠217上最高位置时,齿条220靠近第一固定轴205的一端刚好与第二小齿轮224接触,下部大连板208处于向后收缩的极限状态;当伺服电机215运转使带齿条220的下部大连板208向前运动时,第二滚珠丝杠217正好驱动上下移动大板308向下运动;齿条220靠近第二转动轴213的一端刚好与第二小齿轮224接触时,下部大连板208处于向前伸展的极限状态,此时,上下移动大板308处于其能够到达的第二滚珠丝杠217上最低位置。
66.进一步的优化技术方案,所述的旋转滚筒305内部设置有电磁铁块315,电磁铁块315不少于四块,且电磁铁块315均匀分布在以主轴为中心的旋转滚筒305上;所述的前端横板311上未安装驱动电机314的一侧内部设置有电环313,电环313设置中旋转滚筒305与第二轴承207之间;
所述的电环313上设置有正极端318、轴孔319、负极端320、阶梯台321;正极端318、负极端320为两个同心电极凸环,且电连接到外部控制器;旋转滚筒305与电环313连接一侧设置有正极槽316、负极槽317,正极槽316、负极槽317为两个同心的电极凹槽;旋转滚筒305的主轴312穿过轴孔319,正极端318插入正极槽316,负极端320插入负极槽317,阶梯台321贴合到旋转滚筒305设置有负极槽317,正极槽316的侧面;电环313与第二轴承207固定在前端横板311内部保持不动,旋转滚筒305旋转过程中正极槽316、负极槽317始终分别与正极端318、负极端320滑动接触实现导通为电磁铁块供电;所述的正极端318、负极端320上设置有电极片322,电极片322覆盖在正极端318或负极端320的环面上,且不覆盖面积不超过环面的一半;所述的正极槽316、负极槽317的环面上均覆盖有导电片323,正极槽316上的导电片323、负极槽317的导电片323一一对应排列组成一个包含正极、负极的导电组;导电组的数量均与电磁铁块315的数量一致;每一个导电组的正极、负极分别与一个电磁铁块315的正极、负极电连接;旋转滚筒305旋转过程中,电磁铁块315的正极、负极通过导电片323依次与正极端318和负极端320上的电极片322接触实现通电,进而让每个电磁铁块315交替通电实现工作;电环313安装好的状态下,正极槽316、负极槽317环面覆盖的导电片323处于旋转滚筒305靠近棒柱401一侧,以保证旋转滚筒305旋转过程中,通过控制器打开电磁铁块315后总是保证能让靠近棒柱401一侧的电磁铁块315打开,这样能够让旋转滚筒305随旋转方向施加金属的棒柱401引力,进而将金属的棒柱401向上推。
67.进一步的优化本技术方案,所述的地脚调整装置114采用电动伸缩杆控制伸缩,当本设计装置到达操作工作场地时,通过调整地脚调整装置114使得整体装置平衡稳定,解决了提升棒柱401时出现过度的颤动性,并保证上下移动大板308自由伸缩。
68.进一步的优化本技术方案,所述的每个大滚轮206上设置有独立的驱动电机,用电机驱动实现前进、后退、转弯。
69.进一步的优化技术方案,所述的托盘架204内部设置有电磁铁,电磁铁电连接控制器,通过控制器按需控制电磁铁打开或关闭;在搬运金属的棒柱401时打开电磁铁能够让托盘架204紧紧拖住金属的棒柱401。
70.进一步的优化技术方案,两个夹紧块304内部设置有电磁铁,电磁铁电连接控制器,通过控制器按需控制电磁铁打开或关闭;需要将金属的棒柱401紧紧的固定在夹紧块304内部时,打开电磁铁能够让夹紧块304紧紧夹住金属的棒柱401。
71.进一步的优化技术方案,所述的旋转滚筒305中部设有向内凹陷的弧,以方便棒柱401倚靠。
72.本发明的工作原理如下。
73.步骤一:推动本设计装置到操作的工作场地,通过调整地脚调整装置114使得整体装置平衡稳定:调整地脚调整装置114解决了提升棒柱401时出现过度的颤动性,并保证上下移动大板308自由伸缩;所述的地脚调整装置114采用电动伸缩杆控制伸缩,调节更方便;由于,所述的每个大滚轮206上设置有独立的驱动电机,用电机驱动实现前进、后
退、转弯,因此设计装置到操作的工作场地或者转场都很方便。
74.步骤二:通过控制器控制伺服电机215运转,伺服电机215运转使带齿条220的下部大连板208向前运动,同时第二滚珠丝杠217正好驱动上下移动大板308向下运动,直至齿条220靠近第二转动轴213的一端刚好与第二小齿轮224接触让下部大连板208处于向前伸展,让托盘架204卡入棒柱401下部,让棒柱401倾斜靠在旋转滚筒305上,并通过控制器控制贯穿电机218运转让夹紧块304夹住棒柱401;接着,通过控制器控制伺服电机215运转,服电机215运转使带齿条220的下部大连板208向后运动,此过程中第二滚珠丝杠217将旋转让下移动大板308向上运动将棒柱401竖立或者倾斜靠在旋转滚筒305上,实现竖立或搬运目的:因在第一转动轴201贯穿托盘架204的交叉中部;托盘架204的一面上挂钩小块223通过大扭矩弹簧222和第一锁套221连接固定;因托盘架204交叉出开设的通孔内径大于第一转动轴201,因此当第一转动轴201旋转运动时不会带动托盘架204一块旋转运动;托盘架204其中另一面是倾斜面;可以很轻松的插到有间隙的棒柱401下方;同时和旋转滚筒305的配合;所以很轻松的抬起搬运的棒柱401;因上下移动大板308处于其能够到达的第二滚珠丝杠217上最高位置时,齿条220靠近第一固定轴205的一端刚好与第二小齿轮224接触,下部大连板208处于向后收缩的极限状态;当伺服电机215运转使带齿条220的下部大连板208向前运动时,第二滚珠丝杠217正好驱动上下移动大板308向下运动;齿条220靠近第二转动轴213的一端刚好与第二小齿轮224接触时,下部大连板208处于向前伸展的极限状态,此时,上下移动大板308处于其能够到达的第二滚珠丝杠217上最低位置,能够更好的实现托盘架204拖起棒柱401的同时,夹紧块304夹住棒柱401将棒柱401竖立或者倾斜靠在旋转滚筒305上,实现竖立或搬运目的。
75.在上述过程中,可以根据需要通过控制器控制旋转滚筒305旋转,让进而帮助棒柱401竖立或者倾斜。
76.如果遇到较长的棒柱401时,通过控制器控制旋转滚筒305和夹紧块304配合工作,能够让旋转滚筒305带动棒柱401向上滑动,以实现更好工作。
77.如果遇到金属的棒柱401,通过控制器控制控制旋转滚筒305上的电磁铁块315,让靠近棒柱401一侧的电磁铁块315保持打开,这样能够让旋转滚筒305随旋转方向施加金属的棒柱401引力,进而将金属的棒柱401向上推:由于旋转滚筒305上的卡槽306,能够增加摩擦;由于所述的旋转滚筒305内部设置有电磁铁块315,电磁铁块315不少于四块,且电磁铁块315均匀分布在以主轴为中心的旋转滚筒305上;所述的前端横板311上未安装驱动电机314的一侧内部设置有电环313,电环313设置中旋转滚筒305与第二轴承207之间,保证了电磁铁块315能够按需工作;由于所述的托盘架204内部设置有电磁铁,电磁铁电连接控制器,通过控制器按需控制电磁铁打开或关闭;在搬运金属的棒柱401时打开电磁铁能够让托盘架204紧紧拖住金属的棒柱401;由于两个夹紧块304内部设置有电磁铁,电磁铁电连接控制器,通过控制器按需控制电磁铁打开或关闭;需要将金属的棒柱401紧紧的固定在夹紧块304内部时,打开电磁铁能够让夹紧块304紧紧夹住金属的棒柱401。
78.为了实现棒柱401的竖立目的时,通过控制器控制本发明中的地脚调整装置411、伺服电机215、电磁铁块315、驱动电机314、贯穿电机218、两个夹紧块304内部的电磁铁、盘架204内部的电磁铁协同工作实现棒柱401的竖立后,通过控制贯穿电机218工作松开棒柱401,把棒柱401竖立在指定位置,此时上下移动大板308处于第二滚珠丝杠217上的高位,齿条220靠近第一固定轴205的一端与第二小齿轮224接触或距离最近,下部大连板208处于向后收缩状态,工作完成;如果是竖立或者搬运金属的棒柱401,该过程中可以按需通过控制器控制两个夹紧块304内部的电磁铁、盘架204内部的电磁和电磁铁块315打开或者关闭。
79.为了实现棒柱401的搬运目的时,通过控制器控制本发明中的地脚调整装置411、伺服电机215、电磁铁块315、驱动电机314、贯穿电机218、两个夹紧块304内部的电磁铁、盘架204内部的电磁铁协同工作并将棒柱401搬运到指定位置后,如果需要将棒柱401放平,则通过控制器控制伺服电机215运转让第二滚珠丝杠217驱动上下移动大板308向下运动,同时由于齿条220与第二滚珠丝杠217的运动是关联的,带有齿条220的下部大连板208向前运动,协同将棒柱401放下,接着通过控制贯穿电机218工作松开棒柱401;如果是竖立或者搬运金属的棒柱401,该过程中可以按需通过控制器控制两个夹紧块304内部的电磁铁、盘架204内部的电磁和电磁铁块315打开或者关闭。
80.应当理解的是,本发明的控制方式是通过控制器来自动控制,控制器的控制电路通过本领域的技术人员简单编程即可实现,属于本领域的公知常识,并且本发明主要用来保护机械装置,所以本发明不再详细解释控制方式和电路连接;并且上述具体实施方式仅仅用于示例性说明或解释本发明的原理,而不构成对本发明的限制。因此,在不偏离本发明的精神和范围的情况下所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。此外,本发明所附权利要求旨在涵盖落入所附权利要求范围和边界、或者这种范围和边界的等同形式内的全部变化和修改例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1