门式起重机数字孪生体的构建方法
1.本发明涉及数字孪生体技术领域,尤其是一种门式起重机数字孪生体的构建方法。
背景技术:
2.门式起重机是桥式起重机的一种变形,又叫龙门吊。主要用于室外的货场、料场货、散货的装卸作业。门式起重机具有场地利用率高、作业范围大、适应面广、通用性强等特点,在港口货场得到广泛使用。门式起重机的顶架上安装有平移机构和卷扬机构,平移机构能够带动卷扬机构往复平移,用过卷扬机构吊装货物,顶架的两侧安装两个门架,门架下设置有底座,底座通过行走轮与地面上的导轨连接。可以直接在地面的轨道上行走,为了驱动底座行走。
3.现有的门式起重机没有数字孪生平台,难以实施监测门式起重机工作状态。
技术实现要素:
4.本发明的目的在于提供一种门式起重机数字孪生体的构建方法,克服前述现有技术的不足,实施监测门式起重机工作状态。
5.本发明解决其技术问题所采取的技术方案是:
6.一种门式起重机数字孪生体的构建方法,所述门式起重机包括第一导轨、底座、行走轮、转轴、第一电机、门架、顶架、平移机构和卷扬机构,所述第一导轨沿第一方向平行设置有两条,每一条第一导轨上均设置有底座,底座的下方的两端沿第一方向间隔安装有行走轮,底座的上端安装有门架,门架的顶部之间通过顶架连接,顶架上沿第二方向安装有平移机构,平移机构上设置于卷扬机构;沿第二方向位置相对应的两个行走轮之间通过转轴连接,其中一个行走轮与第一电机的输出轴连接并通过第一电机驱动旋转,第一电机的一侧设置有速度传感器,底座上设置有载荷传感器,卷扬机构的一侧设置有位置传感器,卷扬机构上设置有位姿传感器;
7.所述门式起重机数字孪生体包括物理空间模块、通信模块、算法模块、客户端显示模块四部分,所述物理空间模块包括门式起重机和设置于门式起重机上的若干传感器;
8.所述门式起重机数字孪生体的构建方法包括如下步骤:
9.(1)在物理空间模块的门式起重机中布置若干传感器,对门式起重机的动作、状态进行数据采集,通过载荷传感器、速度传感器、位姿传感器和位置传感器采集到的数据对门式起重机进行静力学分析,确定影响门式起重机结构性能的关键因素;
10.(2)通过通信模块的通讯手段将物理空间模块采集的数据传输到算法模块;
11.(3)在算法模块中采用降噪和去噪方法对通信模块传输来的数据进行预处理,提高信噪比,然后通过将机理模型、ai算法、专家知识和解析模型计算得到的数据进行融合,完成起门式重机数据的虚实融合,以实时传感器数据作为输入,实现对起重机几何形态和结构力学性能的在线计算;
12.(4)将算法模块计算得到的数据与物理空间模块的传感器采集的数据分别以三维模型和信息量化的形式在客户端可视化,辅助用户合理决策。
13.进一步的,所述卷扬机构设置有两个;两个卷扬机构的一侧均设置有位置传感器,两个卷扬机构均包括吊绳,位姿传感器设置于吊绳的末端。
14.进一步的,所述通信模块包括蓝牙通讯、无线网络通讯、局域网通讯和gprs通讯,上述通讯方式通过tcp/ip、netbeui、ipx/spx将数据传输至算法模块。
15.进一步的,步骤(1)中还需要对门式起重机的工作环境进行实时采集;通过3d扫描仪实现对门式起重机的三维实体建模,用于实时观察门式起重机作业进度。
16.进一步的,将物理空间模块的数据信息通过通信模块映射到算法模块的数字世界,对起重机的特征、行为和性能等进行高逼真度描述和建模,使在数字世界中建立的门式起重机虚拟模型与物理空间中的起重机实体在几何、材料、行为等方面保持一致,实现物理世界向数字世界的忠实镜像。
17.进一步的,所述客户端显示模块显示设备运行姿态监控、设备故障预警和设备力学性能评估。
18.本发明中,算法模块构建的数字世界主要实现物理空间模块中物理世界门式起重机姿态和应力动态实时可视化,经滤波、去噪后的传感数据在线动态驱动数字世界起重机孪生体实时更新门式起重机的动作,使数字世界孪生体与物理世界实体姿态保持一致,实现门式起重机姿态在数字世界实时可视化;数字世界不仅可视化提升门式起重机操作的重物的轨迹,而且以数字的形式显示门式起重机相关点的位移值、重物的载荷大小、重物提升速度、位置等信息,当起重机姿态参数超出规定范围,即可认为姿态异常,数字世界给予警告提示,从多角度、多状态参数描述起重机物理空间姿态;传感数据驱动构建的ai算法实时计算起重机应力值,并通过云图动态显示,系统还实时显示了载荷大小,提升高度等信息;客户端显示模块能够显示起重机的变形云图、起重机的应力云图,在客户端显示模块中通过鼠标点击门式起重机不同位置,状态显示栏中的应力表显示该点对应的应力变化曲线,如此,实现物理空间中门式起重机应力的在线计算和可视化。
19.本发明的有益效果是:与现有技术相比,本发明的一种门式起重机数字孪生体的构建方法具有以下优点:实现物理空间中门式起重机应力的在线计算和可视化。
附图说明
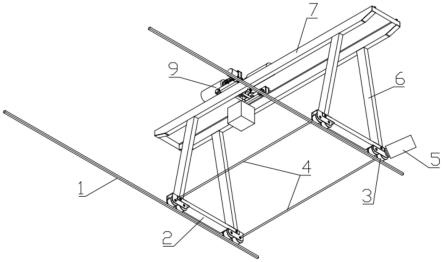
20.图1为本发明门式起重机的立体结构示意图;
21.图2为本发明门式起重机的俯视结构示意图;
具体实施方式
22.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
23.一种门式起重机数字孪生体的构建方法,所述门式起重机包括第一导轨1、底座2、行走轮3、转轴4、第一电机5、门架6、顶架7、平移机构8和卷扬机构9,所述第一导轨沿第一方向平行设置有两条,每一条第一导轨上均设置有底座,底座的下方的两端沿第一方向间隔安装有行走轮,底座的上端安装有门架,门架的顶部之间通过顶架连接,顶架上沿第二方向
安装有平移机构,平移机构上设置于卷扬机构;沿第二方向位置相对应的两个行走轮之间通过转轴连接,其中一个行走轮与第一电机的输出轴连接并通过第一电机驱动旋转,第一电机的一侧设置有速度传感器,底座上设置有载荷传感器,卷扬机构的一侧设置有位置传感器,卷扬机构上设置有位姿传感器;
24.所述门式起重机数字孪生体包括物理空间模块、通信模块、算法模块、客户端显示模块四部分,所述物理空间模块包括门式起重机和设置于门式起重机上的若干传感器;
25.所述门式起重机数字孪生体的构建方法包括如下步骤:
26.(1)在物理空间模块的门式起重机中布置若干传感器,对门式起重机的动作、状态进行数据采集,通过载荷传感器、速度传感器、位姿传感器和位置传感器采集到的数据对门式起重机进行静力学分析,确定影响门式起重机结构性能的关键因素;
27.(2)通过通信模块的通讯手段将物理空间模块采集的数据传输到算法模块;
28.(3)在算法模块中采用降噪和去噪方法对通信模块传输来的数据进行预处理,提高信噪比,然后通过将机理模型、ai算法、专家知识和解析模型计算得到的数据进行融合,完成起门式重机数据的虚实融合,以实时传感器数据作为输入,实现对起重机几何形态和结构力学性能的在线计算;
29.(4)将算法模块计算得到的数据与物理空间模块的传感器采集的数据分别以三维模型和信息量化的形式在客户端可视化,辅助用户合理决策。
30.本实施例中,所述卷扬机构设置有两个;两个卷扬机构的一侧均设置有位置传感器,两个卷扬机构均包括吊绳,位姿传感器设置于吊绳的末端。
31.本实施例中,所述通信模块包括蓝牙通讯、无线网络通讯、局域网通讯和gprs通讯,上述通讯方式通过tcp/ip、netbeui、ipx/spx将数据传输至算法模块。
32.本实施例中,步骤(1)中还需要对门式起重机的工作环境进行实时采集;通过3d扫描仪实现对门式起重机的三维实体建模,用于实时观察门式起重机作业进度。
33.本实施例中,将物理空间模块的数据信息通过通信模块映射到算法模块的数字世界,对起重机的特征、行为和性能等进行高逼真度描述和建模,使在数字世界中建立的门式起重机虚拟模型与物理空间中的起重机实体在几何、材料、行为等方面保持一致,实现物理世界向数字世界的忠实镜像。
34.本实施例中,所述客户端显示模块显示设备运行姿态监控、设备故障预警和设备力学性能评估。
35.本发明中,算法模块构建的数字世界主要实现物理空间模块中物理世界门式起重机姿态和应力动态实时可视化,经滤波、去噪后的传感数据在线动态驱动数字世界起重机孪生体实时更新门式起重机的动作,使数字世界孪生体与物理世界实体姿态保持一致,实现门式起重机姿态在数字世界实时可视化;数字世界不仅可视化提升门式起重机操作的重物的轨迹,而且以数字的形式显示门式起重机相关点的位移值、重物的载荷大小、重物提升速度、位置等信息,当起重机姿态参数超出规定范围,即可认为姿态异常,数字世界给予警告提示,从多角度、多状态参数描述起重机物理空间姿态;传感数据驱动构建的ai算法实时计算起重机应力值,并通过云图动态显示,系统还实时显示了载荷大小,提升高度等信息;客户端显示模块能够显示起重机的变形云图、起重机的应力云图,在客户端显示模块中通过鼠标点击门式起重机不同位置,状态显示栏中的应力表显示该点对应的应力变化曲线,
如此,实现物理空间中门式起重机应力的在线计算和可视化。
36.上述具体实施方式仅是本发明的具体个案,本发明的专利保护范围包括但不限于上述具体实施方式的产品形态和式样,任何符合本发明权利要求书且任何所属技术领域的普通技术人员对其所做的适当变化或修饰,皆应落入本发明的专利保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1