一种智能化垃圾自动分类装置的制作方法
1.本发明涉及智慧生活技术领域,具体为一种智能化垃圾自动分类装置。
背景技术:
2.垃圾分类,一般是指按一定规定或标准将垃圾分类储存、投放和搬运,从而转变成公共资源的一系列活动的总称。垃圾分类的目的是提高垃圾的资源价值和经济价值,减少垃圾处理量和处理设备的使用,降低处理成本,减少土地资源的消耗。
3.实际现在家庭中的生活垃圾大多数以包为单位丢弃,多种垃圾混合在一起,无法进行较为准确的识别,垃圾分类的效果一般,有待于改进一种智能化垃圾自动分类装置。
技术实现要素:
4.(一)解决的技术问题针对现有技术的不足,本发明提供了一种智能化垃圾自动分类装置,解决了垃圾大多数以包为单位丢弃,多种垃圾混合无法进行较为准确的识别的问题。
5.(二)技术方案为实现上述目的,本发明提供如下技术方案:一种智能化垃圾自动分类装置,包括箱体,所述箱体的前表面左侧上方开设投放口,所述箱体的内部右侧放置有多个垃圾箱,每个所述垃圾箱的上表面前方固定连接有立板,所述立板的后表面中部固定连接有红外发射器,所述箱体的内部左侧上方固定连接与弹簧座组件,所述弹簧座组件的上方安装有震动电机一号,所述震动电机一号的左右两侧固定连接有第二支杆,所述第二支杆的顶端固定连接有第一支杆,所述第一支杆的顶端固定连接有震动盘,所述震动盘的上表面外围固定连接有弧形板,所述震动盘的上表面中部固定连接有承重传感器,所述承重传感器的顶端固定连接有放置板,所述箱体的内部上方固定连接有多个立杆,每个所述立杆的底端固定连接有安装座,所述安装座的内部开设弧形槽,所述弧形槽的内部活动连接有球体,所述球体的内部开设凹槽,所述凹槽的内部活动连接有圆球,所述圆球的顶端固定连接有圆杆,且所述圆杆固定于所述安装座的内部,所述球体的底端固定连接有支架,所述支架的底端固定连接有挡板,所述挡板为两个,前后分布的两个所述挡板底端固定连接有一个震动轨道,两个所述挡板的相对侧固定连接有光电门,所述震动轨道的下方安装有震动电机二号,所述箱体的内部上方右侧固定连接有吊杆,所述吊杆的底端固定连接有摄像头,所述箱体的内部左侧固定连接有电机座,所述电机座的上表面固定连接有电机,所述电机的输出端固定连接有丝杆,所述丝杆的外侧壁活动连接有丝杆套,所述丝杆套的前表面固定连接有红外接收器,所述丝杆套的底端固定连接有位移传感器,所述丝杆套的上表面后方固定连接有两个侧板,两个所述侧板的内部通过转轴转动连接有转动块,所述转动块的顶端固定连接有物料平台,所述物料平台的上表面固定连接有u形条,所述丝杆套的上表面前方固定连接有支撑条,且所述支撑条与所述物料平台相接触,所述丝杆套的上表面前方中部固定连接有马达,所述马达的输出端固定连接有转盘,所述转盘的上方接触有t形杆,所述t形杆的
外部套设有弹簧,所述t形杆的外部上方套设有圆筒架,且所述圆筒架固定于所述支撑条侧面,所述t形杆的顶端固定连接有固定块,所述固定块与所述物料平台的下表面相接触。
6.优选的,所述箱体的前表面左侧靠近所述投放口的下方安装有显示屏,所述投放口的内部下表面焊接固定有导向板,且所述导向板的侧视呈倾斜状,所述投放口的内部上表面焊接固定有遮板。
7.优选的,所述垃圾箱的数量共四个,且四个所述垃圾箱从左到右依次为其它垃圾、有害垃圾、可回收垃圾、不可回收垃圾,所述箱体的内部下表面左侧固定连接有限位板,且所述限位板与最左侧的所述垃圾箱相接触。
8.优选的,所述弹簧座组件包括弹簧组、底板和座板,所述底板固定于所述箱体的内部,所述底板的上表面固定连接有所述底板,所述底板的顶端固定连接有所述座板,所述座板的上表面固定连接有所述震动电机一号。
9.优选的,所述弧形板的内部设有所述放置板,所述弧形板俯视呈具有缺口的圆环形,且所述缺口处在所述弧形板的右侧位置。
10.优选的,所述震动轨道的下表面固定连接有连接杆,所述连接杆的底端固定连接有所述震动电机二号,且所述震动电机二号的左右两侧安装有所述第二支杆和所述第一支杆。
11.优选的,所述箱体的内部左侧下方安装有控制模块和单片机集成模块,所述承重传感器与所述单片机集成模块电性连接,所述单片机集成模块与所述控制模块电性连接,所述控制模块与所述震动电机一号、所述震动电机二号、所述光电门、所述电机、所述摄像头、所述红外发射器、所述马达、所述红外接收器、所述位移传感器、所述显示屏电性连接。
12.优选的,所述箱体的内部右侧固定连接有丝杆座,所述丝杆座的内部转动连接有所述丝杆。
13.优选的,所述红外发射器的数量共四个,四个所述红外发射器单独控制,所述红外接收器与四个所述红外发射器相适配。
14.(三)有益效果本发明提供了一种智能化垃圾自动分类装置,具备以下有益效果:(1)、本发明中,垃圾袋包裹的垃圾从投放口丢入震动盘,承重传感器检测到有重量变化,能够借此实现震动电机一号和震动电机二号震动,盘震动,将垃圾震散开,再落在震动轨道上,将垃圾分开一样一样的震动到物料平台上,光电门检测到有物体通过后,发出信号给单片机集成模块,进而通过控制模块控制震动电机一二号停止震动,这样能够避免物品平台倒垃圾时,震动轨道上的物体继续向下掉落,物料平台上的摄像头识别垃圾类型,进而电机运行,将物料平台移动到同等垃圾类型的垃圾箱上方,这时,马达运行,将物料平台掀起,垃圾从而倒入相应的垃圾箱中,随之,电机轴端反向运行,由于设置了位移传感器、控制模块、单片机集成模块,在单片机集成模块中有计算机程序以及算法,可以实现物料平台移动到某个位置,之后能够原路返回的功能,利于继续后续物料平台继续传送垃圾,智能化操作,垃圾分类,更环保,分类准确。
附图说明
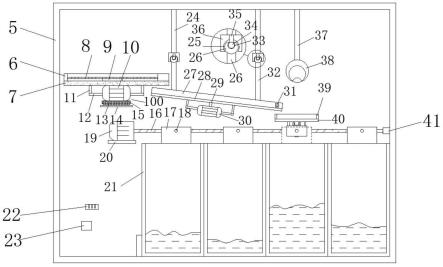
15.图1为本发明的结构示意图;
图2为本发明的内部结构示意图;图3为本发明中的局部结构示意图;图4为本发明中的局部结构示意图。
16.图中:100、弹簧座组件;1、显示屏;2、导向板;3、投放口;4、遮板;5、箱体;6、弧形板;7、震动盘;8、放置板;9、承重传感器;10、震动电机一号;11、第一支杆;12、第二支杆;13、弹簧组;14、底板;15、座板;16、丝杆;17、立板;18、红外发射器;19、电机;20、电机座;21、垃圾箱;22、控制模块;23、单片机集成模块;24、立杆;25、弧形槽;26、球体;27、挡板;28、震动轨道;29、连接杆;30、震动电机二号;31、光电门;32、支架;33、凹槽;34、圆球;35、圆杆;36、安装座;37、吊杆;38、摄像头;39、u形条;40、物料平台;41、丝杆座;42、固定块;43、圆筒架;44、弹簧;45、t形杆;46、转盘;47、马达;48、位移传感器;49、侧板;50、转动块;51、支撑条;52、丝杆套;53、红外接收器。
具体实施方式
17.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
18.如图1-4所示,本发明提供一种技术方案:一种智能化垃圾自动分类装置,包括箱体5,箱体5的前表面左侧上方开设投放口3,箱体5的内部右侧放置有多个垃圾箱21,每个垃圾箱21的上表面前方固定连接有立板17,立板17的后表面中部固定连接有红外发射器18,箱体5的内部左侧上方固定连接与弹簧座组件100,弹簧座组件100的上方安装有震动电机一号10,震动电机一号10的左右两侧固定连接有第二支杆12,第二支杆12的顶端固定连接有第一支杆11,第一支杆11的顶端固定连接有震动盘7,震动盘7的上表面外围固定连接有弧形板6,震动盘7的上表面中部固定连接有承重传感器9,承重传感器9的顶端固定连接有放置板8,箱体5的内部上方固定连接有多个立杆24,每个立杆24的底端固定连接有安装座36,安装座36的内部开设弧形槽25,弧形槽25的内部活动连接有球体26,球体26的内部开设凹槽33,凹槽33的内部活动连接有圆球34,圆球34的顶端固定连接有圆杆35,且圆杆35固定于安装座36的内部,球体26的底端固定连接有支架32,支架32的底端固定连接有挡板27,挡板27为两个,前后分布的两个挡板27底端固定连接有一个震动轨道28,两个挡板27的相对侧固定连接有光电门31,震动轨道28的下方安装有震动电机二号30,箱体5的内部上方右侧固定连接有吊杆37,吊杆37的底端固定连接有摄像头38,箱体5的内部左侧固定连接有电机座20,电机座20的上表面固定连接有电机19,电机19的输出端固定连接有丝杆16,丝杆16的外侧壁活动连接有丝杆套52,丝杆套52的前表面固定连接有红外接收器53,丝杆套52的底端固定连接有位移传感器48,丝杆套52的上表面后方固定连接有两个侧板49,两个侧板49的内部通过转轴转动连接有转动块50,转动块50的顶端固定连接有物料平台40,物料平台40的上表面固定连接有u形条39,丝杆套52的上表面前方固定连接有支撑条51,且支撑条51与物料平台40相接触,丝杆套52的上表面前方中部固定连接有马达47,马达47的输出端固定连接有转盘46,转盘46的上方接触有t形杆45,t形杆45的外部套设有弹簧44,t形杆45的外部上方套设有圆筒架43,且圆筒架43固定于支撑条51侧面,t形杆45的顶端固定连接有固
定块42,固定块42与物料平台40的下表面相接触。
19.本实施例中,立杆24和支架32之间的结构元件,能够避免震动电机二号30震动导致的立杆24与箱体5连接处断裂;摄像头38通过神经网络视觉识别判断垃圾种类;在马达47运行时,通过转盘46将t形杆45向上顶起,进而固定块42将物料平台40前方向上掀起,垃圾向下落。
20.进一步的,箱体5的前表面左侧靠近投放口3的下方安装有显示屏1,投放口3的内部下表面焊接固定有导向板2,且导向板2的侧视呈倾斜状,投放口3的内部上表面焊接固定有遮板4,显示屏1上显示投入垃圾的重量,导向板2的右视从上到下逐渐下滑,垃圾顺着导向板2滑落在震动盘7上的放置板8上,遮板4呈扁平的长方体形状,能够挡雨挡雪。
21.进一步的,垃圾箱21的数量共四个,且四个垃圾箱21从左到右依次为其它垃圾、有害垃圾、可回收垃圾、不可回收垃圾,箱体5的内部下表面左侧固定连接有限位板,且限位板与最左侧的垃圾箱21相接触,限位板能够使多个垃圾箱21就限定在箱体5的内部右侧位置。
22.进一步的,弹簧座组件100包括弹簧组13、底板14和座板15,底板14固定于箱体5的内部,底板14的上表面固定连接有底板14,底板14的顶端固定连接有座板15,座板15的上表面固定连接有震动电机一号10,座板15呈倒立的凹字形结构,弹簧组13中含有若干个弹簧,弹簧组13的上方嵌在座板15的内部,弹簧座组件100能够减小震动电机一号10向下震动。
23.进一步的,弧形板6的内部设有放置板8,弧形板6俯视呈具有缺口的圆环形,且缺口处在弧形板6的右侧位置,缺口能够使放置板8上的垃圾落在震动轨道28上。
24.进一步的,震动轨道28的下表面固定连接有连接杆29,连接杆29的底端固定连接有震动电机二号30,且震动电机二号30的左右两侧安装有第二支杆12和第一支杆11,在震动电机二号30运行时,会使震动轨道28、第一第二支杆震动,于此同时,支架32也会震动。
25.进一步的,箱体5的内部左侧下方安装有控制模块22和单片机集成模块23,承重传感器9与单片机集成模块23电性连接,单片机集成模块23与控制模块22电性连接,控制模块22与震动电机一号10、震动电机二号30、光电门31、电机19、摄像头38、红外发射器18、马达47、红外接收器53、位移传感器48、显示屏1电性连接,震动电机一号10和震动电机二号30同时运行,同时停止。
26.进一步的,箱体5的内部右侧固定连接有丝杆座41,丝杆座41的内部转动连接有丝杆16,丝杆座41用于支撑丝杆16。
27.进一步的,红外发射器18的数量共四个,四个红外发射器18单独控制,红外接收器53与四个红外发射器18相适配,一个红外发射器18与一个垃圾箱21对应,通过设计,在红外接收器53与有害垃圾的垃圾箱21上的红外发射器18匹配时,就无法与其它三个红外发射器18匹配。
28.综上可得,本发明的工作流程:垃圾袋包裹的垃圾从投放口3丢入震动盘7,承重传感器9检测到有重量变化,能够借此实现震动电机一号10和震动电机二号30运行,震动盘7震动,将垃圾震散开,再落在震动轨道28上,将垃圾分开一样一样的震动到物料平台40上,光电门31检测到有物体通过后,发出信号给单片机集成模块23,进而通过控制模块22控制震动电机一二号停止震动,这样能够避免物品平台倒垃圾时,震动轨道28上的物体继续向下掉落,物料平台40上的摄像头38识别垃圾类型,进而电机19运行,将物料平台移动到同等垃圾类型的垃圾箱21上方,这时,马达47运行,将物料平台40掀起,垃圾从而倒入相应的垃
圾箱21中,随之,电机19轴端反向运行,可以实现物料平台40移动到某个位置,之后能够原路返回的功能,利于继续后续物料平台40继续传送垃圾,智能化操作,垃圾分类,更环保,分类准确。
29.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
30.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1