基于POWERBUS二总线网络的塔机监控系统及方法
基于powerbus二总线网络的塔机监控系统及方法
技术领域
1.本发明属于塔机安全远程监控技术领域,尤其涉及一种基于powerbus二总线网络的塔机监控系统及方法。
背景技术:
2.塔式起重机简称塔机,动臂装在高耸塔身上部的旋转起重机;作业空间大,主要用于房屋建筑施工中物料的垂直和水平输送及建筑构件的安装;由金属结构、工作机构和电气系统三部分组成;金属结构包括塔身、动臂和底座等。工作机构有起升、变幅、回转和行走四部分;电气系统包括电动机、控制器、配电柜、连接线路、信号及照明装置等;因塔机作业空间大,结构大,对其进行安全监控尤为重要。
3.发明人发现,目前现有的塔机安全监控装置存在诸多问题。首先,对塔机的高度、幅度、角度和重量等信号的采集通常采用模拟量采集方式,信号在传输过程中有衰减,导致采集数据不准确,且无法保证采集信号的同步;其次,塔机区域防撞功能主要是采用单一的被动区域防护,通过无线模块进行塔机状态数据的收发,进行判断;这种方式容易受到外界无线信号的干扰,导致区域防撞功能可靠性降低;三是,目前塔机安全监控装置的监控数据一般采用4g-lte网络进行传输,数据传输有一定的延迟,后台无法通过收到的监控数据实时判断塔机的状态,进行提前预警。
技术实现要素:
4.本发明为了解决上述问题,提出了一种基于powerbus二总线网络的塔机监控系统及方法,本发明能够实现全方位的塔机运行状态安全监控,避免人为操作不当或其他原因导致的安全事故的发生。
5.为了实现上述目的,第一方面,本发明提出了一种基于powerbus二总线网络的塔机监控系统,采用如下技术方案:
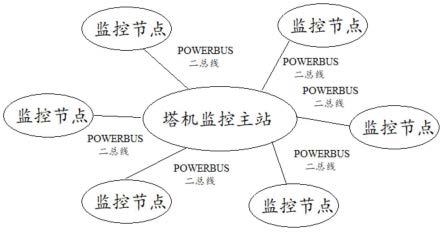
6.基于powerbus二总线网络的塔机监控系统,包括:
7.预设在塔机上的多个监控节点;
8.塔机监控主站,通过powerbus二总线网络与多个监控节点连接;所述监控主站通过两根总线实现对所有监控节点的供电和通讯。
9.进一步的,多个监控节点包括安装在塔机驾驶室内部的倾角传感器节点、连接在塔机回转传动齿轮处的角度传感器节点、安装在塔机吊钩驱动电机处的高度传感器节点、安装在塔机小车驱动电机处的幅度传感器节点、安装在塔机测力环处的重量传感器节点和钢丝绳断线检测节点、风速传感器节点以及安装在塔机的大臂上低的超声波防碰撞节点。
10.进一步的,所述塔机监控主站包括两个powerbus二总线主控模块,分别为主模块和备用模块。
11.进一步的,所述塔机监控主站内设置有lora通讯模块,将超声波防碰撞节点的主动监测和无线lora模块的被动获取的塔机数据监测相结合,对塔机群的防碰撞。
12.进一步的,监控节点处的传感器检测的信息,转换成数字量,再进行二总线信号转换后,通过powerbus二总线网络实现数据传输;同时,监控节点通过powerbus二总线取电,并接收塔机监控主机发送的控制命令,对塔机进行控制。
13.进一步的,所述塔机监控主站包括微控制器,通过powerbus二总线获取各个监控节点的数据,并进行计算、判断和比较;当监测到的信号超过预警值后,进行声光报警。
14.进一步的,进行声光报警时,通过塔机监控主机输出控制信号,切断相应的控制回路,对塔机进行安全保护。
15.进一步的,所述塔机监控主站包括5g通讯模块,监控数据实时发送到云服务器,同时接收云服务器的控制指令,对塔机实施远程控制。
16.进一步的,所述塔机监控主站包括北斗定位模块,用于获取塔机设备的位置信息。
17.为了实现上述目的,第二方面,本发明还提出了一种基于powerbus二总线网络的塔机监控方法,采用如下技术方案:
18.基于powerbus二总线网络的塔机监控方法,采用了如第一方面中所述的基于powerbus二总线网络的塔机监控系统,包括:
19.通过两根总线实现对所有监控节点的供电和通讯;
20.将超声波防碰撞节点的主动监测和无线lora模块的被动获取的塔机数据监测相结合,对塔机群的防碰撞。
21.与现有技术相比,本发明的有益效果为:
22.1、本发明采用powerbus二总线技术,通过两根总线和所有监测节点同时进行供电和通讯,实现了对塔机高度、幅度、角度、重量、风速、塔身倾斜和钢丝绳断裂监测等多路传感器信号的实时采集、历史数据和报警数据的存储功能;
23.2、本发明将超声波防碰撞节点的主动监测和无线lora模块的被动监测相结合,实现了无限数量的群塔防碰撞功能;
24.3、本发明通过采用5g通讯网络和远程塔机监控云平台的无缝融合,实现了对塔机的远程实时监控,在对塔机现场监控和声光报警的同时,利用5g通讯网络的低延迟,可以对远程云平台上所有的被监控塔机进行综合诊断,及时提出预警信息,通过无线网络发送到现场塔机监控主机和管理人员的手机app,从而实现塔机的实时动态监控。
附图说明
25.构成本实施例的一部分的说明书附图用来提供对本实施例的进一步理解,本实施例的示意性实施例及其说明用于解释本实施例,并不构成对本实施例的不当限定。
26.图1为本发明实施例1的结构示意图;
27.图2为本发明实施例1的高度传感器节点连接示意图;
28.图3为本发明实施例1的幅度传感器节点连接示意图;
29.图4为本发明实施例1的角度传感器节点连接示意图;
30.图5为本发明实施例1的倾斜传感器节点连接示意图;
31.图6为本发明实施例1的重量传感器节点连接示意图;
32.图7为本发明实施例1的风速传感器节点连接示意图;
33.图8为本发明实施例1的钢丝绳断线检测节点连接示意图;
34.图9为本发明实施例1的超声波防碰撞节点连接示意图;
35.图10为本发明实施例1的塔机监控主机示意图。
具体实施方式:
36.下面结合附图与实施例对本发明作进一步说明。
37.实施例1:
38.一种基于powerbus二总线网络的塔机监控系统,采用如下技术方案:
39.基于powerbus二总线网络的塔机监控系统,包括:
40.预设在塔机上的多个监控节点;
41.塔机监控主站,通过powerbus二总线网络与多个监控节点连接;所述监控主站通过两根总线实现对所有监控节点的供电和通讯。
42.监控节点包括:高度传感器节点安装在塔机吊钩驱动电机处,幅度传感器节点安装在塔机小车驱动电机处,角度传感器节点连接在塔机回转传动齿轮处,重量传感器节点和钢丝绳断线检测节点安装在塔机的测力环处,倾角传感器节点安装在塔机驾驶室内部,超声波防碰撞节点安装在塔机的大臂上,可以多个均匀分布在塔机大臂。通过powrbus二总线技术,将倾角传感器节点、角度传感器节点、高度传感器节点、幅度传感器节点、风速传感器节点、重量传感器节点、钢丝绳断线检测节点、超声波防碰撞节点等与塔机监控主站连接在一起,组成一个powerbus二总线网络;通过powerbus二总线网络,塔机主站可以通过两根总线实现对所有节点的供电和通讯功能。
43.所述塔机监控主站内部包括微控制器、二总线控制模块、数据存储模块、人机交互模块、声光报警模块、北斗定位模块、5g通讯模块和防碰撞lora通讯模块;所述微控制器通过串口分别与二总线控制模块、北斗定位模块、5g通讯模块和lora防碰撞模块进行通讯;同时微控制器还与数据存储模块、人机交互模块和声光报警模块进行连接。
44.具体的,所述人机交互模块可以采用工业级14寸1024
×
768像素65k色tft串口lcd显示屏;所述5g通讯模块可以采用mh5000-31;所述lora通讯模块可以采用工作频率为433mhz的e32-433t30d;所述北斗定位模块可以采用atgm336h。
45.所述二总线控制模块,包括一个二总线主模块和一个二总线备用模块;当二总线主模块出现故障时,由二总线备用模块接替主模块实现与各个节点的供电和通讯功能。
46.本实施例中,所有控制节点通过powerbus二总线取电,为整个节点提供电源,同时通过powerbus二总线实现节点和塔机监控的双向数据通讯。控制节点在接收到塔机监控主站采集命令后,启动数据采集和转换;在接收到塔机监控主机上传数据命令后,通过powerbus二总线网络将数据传输到监控主机。
47.如图2所示,所述高度传感器节点由高度传感器、单片机和二总线从机芯片pb331及外围电路组成;单片机可以采用stm32g030f6p6,通过ad采样高度传感器信号后转换成数字量;节点在接收到塔机监控主站查询命令后,通过二总线发送高度数据;具体的,单片机通过ad采样高度传感器信号,然后转换成数字量,通过pb331芯片进行二总线信号转换后,通过powerbus二总线网络实现数据传输。同时高度传感器节点通过powerbus二总线取电,并接收塔机监控主机发送的控制命令。
48.如图3所示,所述幅度传感器节点由幅度传感器、单片机和二总线从机芯片pb331
及外围电路组成;单片机可以采用stm32g030f6p6,通过ad采样高度传感器信号后转换成数字量;节点在接收到塔机监控主站查询命令后,通过二总线发送幅度数据;具体的,单片机通过ad采样高度传感器信号,然后转换成数字量,通过pb331芯片进行二总线信号转换后,通过powerbus二总线网络实现数据传输。同时幅度传感器节点通过powerbus二总线取电,并接收塔机监控主机发送的控制命令。
49.如图4所示,所述角度传感器节点由陀螺仪芯片、单片机和二总线从机芯片pb331及外围电路组成;单片机可以采用stm32g030f6p6,通过spi接口获取陀螺仪芯片采集的数字量角度信号;节点在接收到塔机监控主站查询命令后,通过二总线发送角度数据;具体的,单片机通过spi接口获取陀螺仪芯片采集的角度信号,通过pb331芯片进行二总线信号转换后,通过powerbus二总线网络实现数据传输;同时角度传感器节点通过powerbus二总线取电,并接收塔机监控主机发送的控制命令。
50.如图5所示,所述倾斜传感器节点由倾斜传感器芯片scl3300、单片机和二总线从机芯片pb331及外围电路组成;单片机采用stm32g030f6p6,通过spi接口获取scl3300芯片采集的数字量倾斜角度信号;节点在接收到塔机监控主站查询命令后,通过二总线发送倾斜角度数据;具体的单片机通过spi接口获取scl3300芯片采集的倾角信号,通过pb331芯片进行二总线信号转换后,通过powerbus二总线网络实现数据传输;同时倾斜传感器节点通过powerbus二总线取电,并接收塔机监控主机发送的控制命令。
51.如图6所示,所述重量传感器节点由重量传感器、高精度ad转换芯片hx712、单片机和二总线从机芯片pb331及外围电路组成;单片机采用stm32g030f6p6,通过io口获取hx712芯片采集到的重量传感器信号数字量;节点在接收到塔机监控主站查询命令后,通过二总线发送重量数据;具体的,单片机通过io口获取hx712芯片采集的重量传感器信号,通过pb331芯片进行二总线信号转换后,通过powerbus二总线网络实现数据传输;同时重量传感器节点通过powerbus二总线取电,并接收塔机监控主机发送的控制命令。
52.如图7所示,所述风速传感器节点由风速传感器、单片机和二总线从机芯片pb331及外围电路组成;单片机采用stm32g030f6p6,通过ad采样风速传感器信号后转换成数字量;节点在接收到塔机监控主站查询命令后,通过二总线发送风速数据;具体的,单片机通过ad采样风速传感器信号,然后转换成数字量,通过pb331芯片进行二总线信号转换后,通过powerbus二总线网络实现数据传输;同时风速传感器节点通过powerbus二总线取电,并接收塔机监控主机发送的控制命令。
53.如图8所示,所述钢丝绳断线检测节点由钢丝绳断线检测传感器、单片机和二总线从机芯片pb331及外围电路组成;单片机采用stm32g030f6p6,通过ad采样钢丝绳断线检测传感器信号,然后转换成数字量;节点在接收到塔机监控主站查询命令后,通过二总线发送钢丝绳断线检测数据;具体的,单片机通过ad采样钢丝绳断线检测传感器信号,然后转换成数字量,通过pb331芯片进行二总线信号转换后,通过powerbus二总线网络实现数据传输;同时钢丝绳断线检测节点通过powerbus二总线取电,并接收塔机监控主机发送的控制命令。
54.如图9所示,所述超声波防碰撞节点由超声波传感器、单片机和二总线从机芯片pb331及外围电路组成;单片机采用stm32g030f6p6,通过超声波传感器检测外围障碍物与塔机大臂的距离,然后转换成数字量;节点在接收到塔机监控主站查询命令后,通过二总线
发送防碰撞数据;具体的,单片机通过超声波传感器检测外围障碍物与塔机大臂的距离,然后转换成数字量,通过pb331芯片进行二总线信号转换后,通过powerbus二总线网络实现数据传输;同时超声波防碰撞节点通过powerbus二总线取电,并接收塔机监控主机发送的控制命令。
55.如图10所示,包括微控制器采用stm32f103vet6单片机,通过串口1连接二总线控制模块;二总线控制模块由powerbus主控芯片pb620及外围电路构成,二总线控制模块通过powerbus二总线网络获取各个节点的数据,然后通过单片机串口1发送给微控制器;微控制器对采集到的节点数据进行计算、判断和比较,同时将采集后的数据保存到数据存储模块中,用于历史数据的查询;数据存储模块由大容量sd卡构成,微控制器通过spi接口对其进行数据的读写操作;同时,微控制器通过串口2将采集到的节点数据发送到液晶显示器上进行显示;人机交互模块采用触摸方式实现,集成到lcd显示器上,通过串口2与微控制器进行通讯,主要用于塔机监控系统的参数标定和工作状态选择;当监测到的信号超过预警值后,微控制器通过io口控制led灯和语音模块发出声光报警,必要时还可以输出控制信号,切断相应的电机控制回路,实现塔机的安全保护功能;5g通讯模块通过串口3与微控制器进行通讯,将塔机监控系统的实时监控数据发送到云服务器进行存储,同时可以接收云平台控制指令,对塔机实施远程控制。北斗定位模块通过串口4与微控制器进行通讯,用于获取塔机设备的位置信息。lora无线通讯模块用于本地获取本机附近小方位内其它相邻塔机的相关运行高度、幅度和角度信息,传输距离达于6km,用于实现局部区域多塔机运行防碰撞功能。lora无线通讯模块通过串口5与微控制器进行通讯,用于本地获取本机附近小方位内其它相邻塔机的相关运行高度、幅度和角度信息,传输距离达于6km,用于实现局部区域多塔机运行防碰撞功能。
56.本实施例采用powerbus二总线技术,构建塔机监控系统的二总线网络,通过两根总线实现对所有监测节点的供电和通讯。powerbus二总线电压为低压直流,幅值小于36v,为安全电压,对身体不造成伤害;powerbus二总线,无正负极性,比传统的rs485总线网络减少了两根线,降低了布线成本和施工难度;塔机监控主机通过powerbus二总线网络获取各节点信息,所有信息传输均为数字量,与传统塔机监控系统的传感器信息均为模拟量传输相比,信号传输损失大大降低,且通过总线网络,可以实现所有传感器节点数据保持同步,可以更加精确的判断塔机的运行状态;塔机监控系统将超声波防碰撞节点的主动监测和无线lora模块的被动获取其他塔机数据监测相结合,实现了无限数量的群塔防碰撞功能,弥补了单一模式防碰撞可靠性差的缺陷;通过采用5g通讯网络和远程塔机监控云平台的无缝融合,实现了对塔机的远程实时监控,利用5g通讯网络的低延迟,可以对远程云平台上所有的被监控塔机进行综合快速诊断,及时提出预警信息。
57.实施例2:
58.本实施例提供了一种基于powerbus二总线网络的塔机监控方法,采用了如实施例1中所述的基于powerbus二总线网络的塔机监控系统,包括:
59.通过两根总线实现对所有监控节点的供电和通讯;
60.将超声波防碰撞节点的主动监测和无线lora模块的被动获取的塔机数据监测相结合,对塔机群的防碰撞。
61.以上所述仅为本实施例的优选实施例而已,并不用于限制本实施例,对于本领域
的技术人员来说,本实施例可以有各种更改和变化。凡在本实施例的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实施例的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1