基于北斗系统的钢栈桥轨道牵引的浮运船移动控制方法与流程
1.本发明涉及桥梁建设技术领域,具体为一种基于北斗系统的钢栈桥轨道牵引的浮运船移动控制方法。
背景技术:
2.波形钢腹板pc组合箱梁桥是一种新型的钢混凝土组合梁桥,其显著特点是用10~30mm厚的钢板取代厚30~80cm厚的混凝土腹板。采用挂篮悬臂浇筑施工时,中小跨径波形钢腹板pc组合箱梁桥的波形钢腹板安装一般是采用在桥梁0号块附近安装的塔吊进行吊装安装。
3.随着桥梁主跨跨径的增加,尤其是特大跨径的桥梁,塔吊需要覆盖的范围更广,吊装能力要求更高,市面上常见的塔吊不能满足吊装作业半径的要求。在水面上修建桥梁,一般是修建钢栈桥作为构件运输的通道,在完成钢栈桥的搭设后,利用已搭设的钢栈桥,在钢栈桥下游侧钢管桩上设置纵桥向扣锁滑行轨道。在浮运船的上游通过滑行轨道上的2个扣锁,在浮运船纵桥向两侧通过已搭设钢平台的钢管桩上的2个扣锁来与浮运船上的卷扬机用钢丝绳相连。此动力牵引方法无需在浮运船上设置动力系统,也无需在河道范围内另外设置锚锭,可充分利用已搭设钢栈桥的强度、刚度等材料性能。本系统可以实现构件精准定位,并对位置进行修正,确保构件的垂直起吊,确保吊装过程的安全。
技术实现要素:
4.针对现有技术存在的问题,本发明提供一种基于北斗系统的钢栈桥轨道牵引的浮运船移动控制方法。
5.本发明提供如下技术方案如下:一种基于北斗系统的钢栈桥轨道牵引的浮运船移动控制方法,所述浮运船移动控制方法基于北斗系统的钢栈桥轨道牵引的浮运船移动控制系统实现,该系统包括定位系统、控制系统、吊装系统、动力系统、浮运系统、扣锁轨道系统和显示系统;所述定位系统包括北斗差分定位系统、北斗定位终端、imu惯性测量单元和北斗地面基准站,北斗定位终端安装在浮运船上,imu惯性测量单元安装在所吊构件的吊点上,获取浮运船和构件的实时位置;控制系统包括pid控制器,通过识别浮运船位置的实际值并与位置期望值进行比较,利用位置的实际值与期望值的偏差来纠正系统的响应,进行位置的调节控制;吊装系统包括安装在桥面上的吊装设备,吊装设备能在平面内转动,通过吊钩将桥面以下的构件竖向提升;浮运系统包括浮运船;动力系统包括设置在浮运船上的四个卷扬机;扣锁轨道系统包括栈桥扣锁轨道和轨道扣锁;显示系统用于显示吊装设备、卷扬机和浮运船的工作状态;并显示浮运船的实时
位置及行驶轨迹;所述pid控制器安装在陆地上的控制室内,分别与北斗差分定位系统、北斗定位终端、imu惯性测量单元、浮运船动力系统相连,对位置进行动态修正,实现构件垂直起吊和吊装安全。
6.需要进一步说明的是,所述吊装设备包括吊机和吊车。
7.需要进一步说明的是,所述的卷扬机通过转盘固定在浮运船上,卷扬机通过转盘实现方位角的转动;该动力系统在已建成的钢栈桥上设置轨道,在轨道上设置2个能自动定位的锁扣,该锁扣通过控制系统移动到轨道的指定位置并与轨道锁定,该锁扣通过钢丝绳与浮运船上的卷扬机连接;在浮运船的纵桥向通过在已搭设的钢栈桥的钢管桩上设置2个锁扣,该锁扣通过钢丝绳与浮运船上的卷扬机连接,通过卷扬机收放钢丝绳实现浮运船位置的移动。
8.需要进一步说明的是,所述的轨道扣锁安装在纵桥向下游侧的栈桥钢管桩上;轨道扣锁由行走滚轮、北斗定位终端、滚轮动力系统和自动锁定器组成,扣锁与钢丝绳相连。
9.需要进一步说明的是,所述的imu惯性测量单元安装在所吊构件的吊点上,用于监测提升过程起吊绳的竖直度和构件的提升高度。
10.需要进一步说明的是,所述浮运船移动控制方法包括以下步骤:
①
在河岸边的钢栈桥上,利用吊车将波形钢腹板倒运到浮运船上,当浮运船将构件运输到指定位置时,通过桥面上安装的智能吊机将构件调运到桥面上;
②
浮运船上安装有四个卷扬机,卷扬机上安装有钢丝绳,在上游侧钢栈桥一侧的钢管桩上安装有扣锁轨道系统,在纵桥向侧的钢栈桥的钢管桩上安装有固定扣锁;卷扬机作为浮运船的动力装置来运输构件,北斗定位终端安装在浮运船上,获取吊钩和浮运船的实时位置;
③
扣锁通过定位器和控制器移动至指定位置,并自锁固定。
11.④
当浮运船在钢栈桥侧倒运构件时,连接在钢栈桥上的2个轨道扣锁和2个固定扣锁的位置分别为m1~m4,此时卷扬机牵引绳的长度分别为l1~l4,a点和b点分别为浮运船上的已知两点,坐标分别为(xa,ya)、(xb,yb),将a、b两点的坐标位置输入pid控制器中,用来定位倒运构件时浮运船的位置;
⑤
当浮运船在河面上运输构件时,此时浮运船上已知两点的坐标分别为:a'(x
a'
,y
a'
)、b'(x
b'
,y
b'
),a'、b'两点的坐标也输入到pid控制器中,通过pid控制器控制卷扬机工作,给浮运船提供动力,此时此时卷扬机钢丝绳的长度分别为:l1'~l4';
⑥
当吊装系统吊装构件时,此时浮运船上已知两点的坐标分别为:a〞(x
a〞
,y
a〞
)、b〞(x
b〞
,y
b〞
),a〞、b〞两点的坐标也输入到pid控制器中,用来确定构件最终的吊装位置;此时,吊装系统吊钩上安装的imu惯性测量单元监测吊钩的竖直度和吊装速度,当构件还未吊离运输船吊钩发生倾斜时,pid控制器控制卷扬机不断对运输船的位置进行修正,确保吊钩提升构件时一直处于垂直状态。
12.北斗差分定位系统是在北斗卫星导航系统(bds)的基础上,利用差分技术,将得到的单点定位的结果与基准站坐标比较,求解出实时差分修正值,以广播或数据链传输方式,将差分修正值传送至定位系统,以修正其定位,提高其局部范围内用户的定位精度。
13.北斗差分定位系统定位精度达到1米以内,其性能指标已领先全球定位系统。
北斗差分定位系统可广泛应用于海洋测绘、港口航道测量、航道疏浚、船舶进出港及狭窄水道导航定位、海上交通安全管理、海上石油勘探、海洋资源调查、海上救助捕捞、海洋渔业及其他海上领域。
14.北斗地面基准站是数据接收、存储和提供服务的场所,存放着系统服务器和核心网络设备;是永久性测量标志点,是获取观测数据的地面接收端口;包括测量标示、测量标志、观测墩、仪器设备、电力和通信等设施。
15.与现有技术相比,本发明的有益效果如下:1、本发明可以实现构件的自动化、智能化水面运输,不受通航的影响,能使运输构件精准定位,并对位置进行修正,确保构件的垂直起吊,确保吊装过程的安全;2、本发明通过pid控制器控制卷扬机不断对浮运船的位置进行修正,确保吊钩提升构件时一直处于垂直状态;3、本发明采用北斗差分定位系统还能兼容gps信号,这就意味着安装北斗定位终端的浮运船既可以单独使用北斗导航,也可以使用“北斗”和gps“双模”导航,定位精度达到1米以内,其性能指标已领先全球定位系统。
附图说明
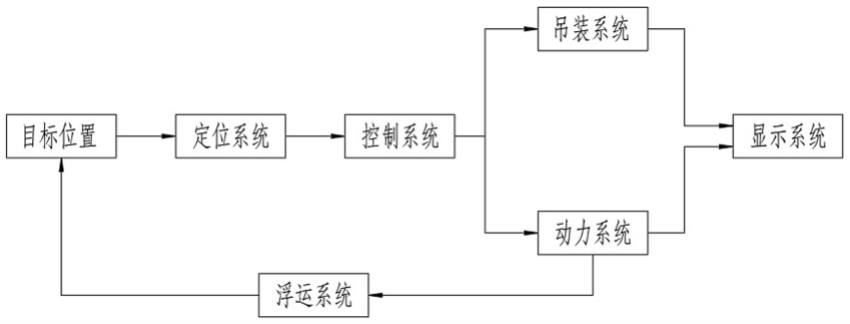
16.图1为本发明的原理图;图2为本发明实施例中浮运船将构件运输到指定位置时的示意图;图3为本发明实施例中浮运船在河面上运输构件的示意图;图4为本发明实施例中扣锁轨道系统的结构示意图;图5为本发明实施例中浮运船在钢栈桥侧倒运构件的平面图;图6为本发明实施例中浮运船在河面上运输构件的平面图;图7为本发明实施例中吊装系统吊装构件时浮运船的平面位置示意图;图中:1、钢栈桥;2、吊车;3、波形钢腹板;4、浮运船;5、桥面;6、吊机;7、卷扬机;8、钢丝绳;9、扣锁轨道系统;10、固定扣锁; 11、构件;12、北斗定位终端;91、栈桥扣锁轨道;92、轨道扣锁。
具体实施方式
17.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
18.如图1所示,一种基于北斗系统的钢栈桥轨道牵引的浮运船移动控制方法,所述浮运船移动控制方法基于北斗系统的钢栈桥轨道牵引的浮运船移动控制系统实现,该系统包括定位系统、控制系统、吊装系统、动力系统、浮运系统、扣锁轨道系统和显示系统;所述定位系统包括北斗差分定位系统、北斗定位终端、imu惯性测量单元和北斗地面基准站,北斗定位终端安装在浮运船上,imu惯性测量单元安装在所吊构件的吊点上,获取浮运船和构件的实时位置;控制系统包括pid控制器,通过识别浮运船位置的实际值并与位置期望值进行比
较,利用位置的实际值与期望值的偏差来纠正系统的响应,进行位置的调节控制;吊装系统包括安装在桥面上的吊装设备,吊装设备能在平面内转动,通过吊钩将桥面以下的构件竖向提升;imu惯性测量单元采用bw-imu400c,bw-imu400c是一款高精度的捷联式惯性测量单元,可以测量运动载体的角速度、加速度参数。原始数据通过具有适当增益的6态卡尔曼滤波得到相应估计,适用于运动或振动状态下的惯性测量。采用高可靠性的mems加速度计和陀螺仪,并通过算法保证测量精度,同时密封设计以及严格的生产工艺保证产品在恶劣的环境下仍能精密地测量载体的角速度和加速度等运动参数。通过非线性补偿、正交补偿、温度补偿和漂移补偿等多种补偿,可以大大消除bw-imu400c的误差源,提高产品精度水平;imu惯性测量单元安装在所吊构件的吊点上,用于监测提升过程起吊绳的竖直度和构件的提升高度。
19.浮运系统包括浮运船;动力系统包括设置在浮运船上的四个卷扬机;扣锁轨道系统包括栈桥扣锁轨道和轨道扣锁;显示系统用于显示吊装设备、卷扬机和浮运船的工作状态;并显示浮运船的实时位置及行驶轨迹;所述pid控制器安装在陆地上的控制室内,分别与北斗差分定位系统、北斗定位终端、imu惯性测量单元、浮运船动力系统相连,对位置进行动态修正,实现构件垂直起吊和吊装安全。
20.所述吊装设备包括吊机和吊车。
21.所述的卷扬机通过转盘固定在浮运船上,卷扬机通过转盘实现方位角的转动;该动力系统在已建成的钢栈桥上设置轨道,在轨道上设置2个能自动定位的锁扣,该锁扣通过控制系统移动到轨道的指定位置并与轨道锁定,该锁扣通过钢丝绳与浮运船上的卷扬机连接;在浮运船的纵桥向通过在已搭设的钢栈桥的钢管桩上设置2个锁扣,该锁扣通过钢丝绳与浮运船上的卷扬机连接,通过卷扬机收放钢丝绳实现浮运船位置的移动。
22.所述的轨道扣锁安装在纵桥向下游侧的栈桥钢管桩上;轨道扣锁由行走滚轮、北斗定位终端、滚轮动力系统和自动锁定器组成,扣锁与钢丝绳相连。
23.所述浮运船移动控制方法包括以下步骤:
①
如图2所示,在河岸边的钢栈桥1上,利用吊车2将波形钢腹板3倒运到浮运船4上,当浮运船4将构件运输到指定位置时,通过桥面5上安装的智能吊机6将构件调运到桥面5上。
24.②
如图3所示,所述的浮运船上安装有四个卷扬机7,卷扬机上安装有钢丝绳8,在上游侧钢栈桥一侧的钢管桩上安装有扣锁轨道系统9,在纵桥向2侧的钢栈桥的钢管桩上安装有固定扣锁10。卷扬机7作为浮运船的动力装置来运输构件11,北斗定位终端12安装在浮运船上,获取吊钩和浮运船的实时位置。
25.③
如图4所示,扣锁轨道系统由栈桥扣锁轨道91和轨道扣锁92组成,扣锁轨道91安装在纵桥向下游侧的栈桥钢管桩上。轨道扣锁由行走滚轮,北斗定位终端,滚轮动力系统和自动锁定器组成,扣锁92与钢丝绳8相连。对应不同位置构件吊装,扣锁通过定位器和控制器移动至指定位置,并自锁固定。
26.④
如图5所示,此时为浮运船在钢栈桥1侧倒运构件的平面图,连接在钢栈桥上的2个轨道扣锁和2个固定扣锁的位置分别为m1~m4,此时卷扬机牵引绳的长度分别为l1~l4,a点和b点分别为浮运船上的已知两点,坐标分别为(xa,ya)、(xb,yb),将a、b两点的坐标位置输入pid控制器中,用来定位倒运构件时浮运船的位置。
27.⑤
如图6所示,此时为浮运船在河面上运输构件的平面图,此时浮运船上已知两点的坐标分别为:a'(x
a'
,y
a'
)、b'(x
b'
,y
b'
),a'、b'两点的坐标也输入到pid控制器中,通过pid控制器控制卷扬机工作,给浮运船提供动力,此时此时卷扬机钢丝绳的长度分别为:l1'~l4'。
28.⑥
如图7所示,此时为吊装系统吊装构件时浮运船的平面位置,此时浮运船上已知两点的坐标分别为:a〞(x
a〞
,y
a〞
)、b〞(x
b〞
,y
b〞
),a〞、b〞两点的坐标也输入到pid控制器中,用来确定构件最终的吊装位置;此时,吊装系统吊钩上安装的imu惯性测量单元监测吊钩的竖直度和吊装速度,当构件还未吊离运输船吊钩发生倾斜时,pid控制器控制卷扬机不断对运输船的位置进行修正,确保吊钩提升构件时一直处于垂直状态。
29.需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
30.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1