便于实施的步梯登楼助行机的制作方法
1.本发明涉及步行楼梯加装助行机械。
背景技术:
2.在原步行楼梯加装辅助登楼的助行机械,如“步行楼梯加装悬挂式电梯”和“步行楼梯里的简易电梯”,它们的主杆由两台吊车的缆绳悬挂在左右两折楼梯中间的间隙内,分别控制两台吊车的运转,主杆便能够倾斜地沿步行楼梯作上升或下降运动。但它们都需要在楼梯扶手栏杆的下部,安装两条与楼梯倾斜度相同的平行扁铁,并去除这两条扁铁之间的局部栏杆段,形成一条与楼梯倾斜度相同的平行空隙,使踏板杆可以在这空隙中运行.这就使得它们安装使用需要改造原有设施。另外,“步行楼梯里的简易电梯”的主杆组件与整个楼道的总高一样长,需要在现场多根主杆组装,技术要求较高,也使得其推广困难。
技术实现要素:
3.本机是对“步行楼梯加装悬挂式电梯”的改进,这改进避免了对步行楼梯原有设施的改造。
4.吊杆由两台吊车的缆绳悬挂在楼梯间隙内,两台吊车分别固定在楼道两边墙壁上,两个定滑轮安装在楼顶板上相当于楼梯间隙两端的位置,两条吊车缆绳分别经过定滑轮向下同时系在吊杆的顶端,这样分别控制两台吊车的运转,吊杆便能够倾斜地沿步行楼梯作上升或下降运动。这些和“步行楼梯加装悬挂式电梯”基本相同。
5.本机的吊杆通过助行架助人登楼,助行架跨越步梯扶手和吊杆连接,在步梯扶手上滚动,人上下楼梯都可以倚坐着助行架的鞍座,沿步梯扶手运行,自主迈步但由助行架承载人的大部分体重,让膝关节和腰椎只需承受远远小于体重的负荷。或者站在助行架的踏板上,由助行架沿步梯运行载人上下楼。
6.不管是倚坐着助行架的鞍座或者站在助行架的踏板上,人体重力都是作用在楼梯踏步范围,而吊车缆绳的牵引力因为步梯的结构决定只能在左右两折步梯中间的间隙内,两者的作用力不在一直线,这中间必然产生横向分力,本机的设计克服了这个横向分力。
7.这样,楼梯扶手栏杆的下部就不用再安装两条与楼梯倾斜度相同的平行扁铁,也不需要去除这两条扁铁之间的局部栏杆段,当然吊杆上也就不再安装可折拢的踏板和把手,这样就不用对原有步梯的设施做任何改变。
附图说明
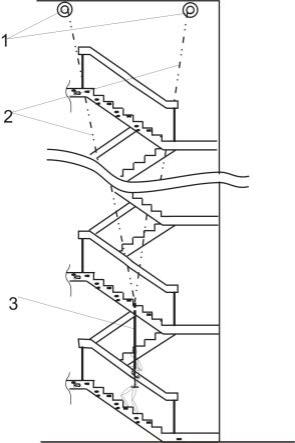
8.附图均为示意图附图1为本机(1根吊杆)在楼道中附图2为本机(2根吊杆)在楼道中附图3为本机(鞍座式)载人正面图附图4为本机(踏板式)载人正面图
附图5为带斜杠助行架(鞍座式)正面图附图6为带斜杠助行架(鞍座式)侧面图附图7为x轮助行架(鞍座式)正面图附图8为2吊杆助行架(鞍座式)正面图。
具体实施例
9.本机与“步行楼梯加装悬挂式电梯”一样,有两台吊车分别固定在楼道两边墙壁上,两条吊车缆绳(2)分别经过定滑轮(1)向下同时系在吊杆(3)的顶端,将吊杆悬挂在左右两折楼梯中间的间隙内,分别控制两台吊车的运转就可以通过吊杆助人沿着步梯登楼;为避免“发明内容”中所述“步行楼梯加装悬挂式电梯”推广应用中的困难,本机设计了跨越扶手与吊杆连接的、在扶手上滚动的助行架,它们有几种不同的结构:带斜杠助行架,由连接段(7)、横杆(9)和竖杆(11)组成,横杆两端分别和连接段下端、竖杆上端互成直角连接,连接段上有连接钩(18)用来与吊杆下端的连接孔(19)连接,横杆(9)上有横滚轮(8),横滚轮在扶手(6)上平面滚动,竖杆(11)近上端有一条与步梯扶手(6)斜度相同的斜杠(15),斜杠二端各有一个斜杠滚轮(10),斜杠滚轮的斜度与楼梯扶手斜度相同,斜杠滚轮在扶手靠人侧面滚动,承受缆绳拉力和人体重力不在同一直线造成的、与吊杆斜滚轮所承受的向对的横向力,需要两个斜杠滚轮是为了避免助行架在运行中产生水平方向的摆动,保持助行架运行的稳定。
10.x轮助行架,横杆(9)上有x形滚轮(16),其两端有锥台形轮缘,x形滚轮在楼梯扶手(6)上平面滚动时两端的锥台形轮缘正好处于楼梯扶手上平面的两边,从而保证了助行架沿着扶手上平面稳定的运行。以上两种助行架都适用于一根吊杆两吊杆助行架,由横杆(9)和竖杆(11)组成,助行架的横杆一端跨过扶手(6)插入轴心管(17)与吊杆(3)下端连接,横杆上有横滚轮(8),横滚轮在扶手(6)上平面滚动,竖杆近上端有一个竖杆斜滚轮(10),竖杆斜滚轮的斜度与楼梯扶手斜度相同,竖杆斜滚轮沿扶手外侧面滚动,承受缆绳拉力和人体重力不在同一直线造成的横向力,这种助行架适用于两根吊杆,。
11.本机设计了两种吊杆:一根吊杆:吊杆(3)长度相当于楼梯扶手到上层踏步的高度,吊杆上端有吊杆斜滚轮(4),吊杆斜滚轮的斜度与楼梯斜度相同,运行时吊杆斜滚轮接触踏步(5)边梁端面,以承受缆绳拉力和人体重力不在同一直线造成的横向力;吊杆下端有连接孔(19)用来与助行架的连接段(7)连接,连接孔穿透吊杆下端的相对两面,以分别用于左右两折楼梯;两根吊杆:两条吊车缆绳(2)分别经过定滑轮(1)向下系在两根吊杆(3)的顶端,两根吊杆的下端通过轴心管(17)相互铰接,轴心管与两根吊杆构成角度的所在平面垂直;吊杆长度相当于楼梯扶手到上层踏步的高度,吊杆上端有橄榄形滚轮(14),运行时橄榄形滚轮接触踏步(5)边端面,承受缆绳拉力和人体重力不在同一直线造成的横向力,用相互铰接的两根吊杆是为了避免助行架在运行中产生水平方向的摆动,保持助行架运行的稳定,橄榄形滚轮方便它与踏步(5)边端面从脱离进入接触状态。。
12.载人方式也有两种:鞍座式:助行架的竖杆(11)长度自扶手(6)至人的臀部,竖杆下端有鞍座(13),鞍
座类似自行车座,有利于靠坐的同时双脚自主迈步,不同的是,它是一个前后都有鼻突的自行车座,这样上下楼都可以靠坐,因为运行速度比较慢,所以鼻突较短方便上下,鞍座通过与其左边或右边构成l形固定连接的调节杆(12)装在竖杆下端。因为上楼时脚是踏向上面一格踏步,下楼时脚是踏向下面一格踏步,所以调节杆在竖杆下端的位置要上楼时装得高,下楼时装得低,因为采用鞍座,人仍自主迈步上下楼,本机提供助力。
13.踏板式:助行架的竖杆(11)长度自扶手(6)至接近踏步(5),竖杆下端安装踏板(18),人站踏板上,直接由本机载人上下楼。
14.本机的使用方法:使用前准备:上楼或下楼之前,如本机不在本楼层,就需要先遥控启动两台吊车(3)同时倒车或顺车召唤吊杆,吊杆到达召唤楼层时关掉一台吊车,至吊杆来到眼前,关掉另一台吊车,把助行架上的连接钩(18) 钩入吊杆下端的连接孔(19),或把两吊杆助行架的横杆一端插入轴心管(17)与吊杆(3)下端连接,使助行架和吊杆连接成一体;(鞍座式)上楼:人靠坐在鞍座(13)上,双脚仍可轻踏在踏步(5)上,遥控启动本折楼梯前方吊车,前方缆绳(2)拉动吊杆(3) 向前向上,吊杆带着助行架沿着扶手(6) 向前向上运行,助行架则通过鞍座向人提供向前向上的抬升力,人仍用双脚在踏步(5)上自主迈步,轻松地毫不费力地沿步梯上楼;到达楼梯转折处,把助行架连接到吊杆(3)的另一面,重复上述步骤继续下一段行程,直至到达目的楼层;如果有必要准备让其他楼层其他人召唤吊杆(3)使用本机,就从吊杆(3)上取下助行架;(鞍座式)下楼:人靠坐在鞍座(13)上,双脚仍可轻踏在踏步(5)上,遥控启动本折楼梯后方吊车倒车,后方缆绳(2)放松使吊杆(3) 向前向下,吊杆带着助行架沿着扶手(6) 向前向下运行,助行架则通过鞍座向人提供向前向下的行动,人仍用双脚在踏步(5)上自主迈步,但可以轻松地毫不费力地沿步梯下楼,膝关节不承受冲击;到达楼梯转折处,把助行架连接到吊杆(3)的反面,重复上述步骤继续下一段行程,直至到达底楼或目的楼层;如果有必要准备让其他楼层其他人召唤吊杆(3)使用本机,就从吊杆(3)上取下助行架。
15.(踏板式)上楼:人站踏板上,遥控启动本折楼梯前方吊车,前方缆绳(2)拉动吊杆(3) 向前向上,吊杆带着助行架沿着扶手(6) 向前向上运行,直接由器械载人上楼,到达楼梯转折处,把助行架连接到吊杆(3)的反面,重复上述步骤继续下一段行程,直至到达目的楼层;如果有必要准备让其他楼层其他人召唤吊杆(3)使用本机,就从吊杆(3)上取下助行架;(踏板式)下楼:人站踏板上,遥控启动本折楼梯后方吊车倒车,后方缆绳(2) 放松使吊杆(3) 向前向下,吊杆带着助行架沿着扶手(6) 向前向下运行,直接由器械载人下楼,到达楼梯转折处,把助行架连接到吊杆(3)的反面,重复上述步骤继续下一段行程,直至到达目的楼层;如果有必要准备让其他楼层其他人召唤吊杆(3)使用本机,就从吊杆(3)上取下助行架。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1