一种机器人智能破包设备的制作方法
1.本发明涉及包装袋技术领域,尤其涉及一种机器人智能破包设备。
背景技术:
2.现有技术中,对于粉状物料包装袋通常是通过扎破包装袋下表面方式使物料自动掉落,需要通过两个电动夹子夹住包装袋两侧,粉状物料下料完成后再抖动包装袋使其中残留物料掉出,最后电动夹带动包装袋移动至废袋收集处,松开电动夹,使包装袋掉落进行收集;由于粉状物料通常容易粘附在包装袋内表面,仅仅通过抖动包装袋难以使包装袋内表面粘附的粉状物料掉落,并且由于电动夹下料全程夹住包装袋,使得电动夹夹持位置的物料无法掉落,使得废袋收集时其中仍然残留有粉状物料,造成资源的浪费,同时抖动包装袋产生大量扬尘容易危害人体健康。
3.针对上述问题,急需一种机器人智能破包设备,来解决上述问题。
技术实现要素:
4.为了克服由于粉状物料通常容易粘附在包装袋内表面,仅仅通过抖动包装袋难以使包装袋内表面粘附的粉状物料掉落,并且由于电动夹下料全程夹住包装袋,使得电动夹夹持位置的物料无法掉落,使得废袋收集时其中仍然残留有粉状物料,造成资源的浪费的缺点,本发明提供一种机器人智能破包设备。
5.本发明的技术方案为:一种机器人智能破包设备,包括有第一支撑架、第二支撑架、下料斗、固定杆、支撑杆、第一破包锥和输送组件;第一支撑架的右方设置有第二支撑架;第一支撑架和第二支撑架之间固接有下料斗;下料斗中部固接有固定杆;固定杆中部固接有支撑杆;支撑杆顶端固接有用于扎破包装袋的第一破包锥;第二支撑架上侧安装有用于输送包装袋的输送组件;还包括有拨板、弧形管、密封板、除尘组件和夹持组件;第一支撑架和第二支撑架上部安装有用于收集下料和抖动包装袋过程中粉尘的除尘组件;除尘组件中部安装有用于夹持和抖动包装袋的夹持组件;夹持组件与下料斗连接;夹持组件上连接有两个前后对称的拨板;夹持组件上连接有多个前后对侧的弧形管;每个弧形管左部和右部均通过扭力弹簧轴连接有一个密封板;还包括有承接组件和清理组件;第一支撑架上侧安装有承接组件;夹持组件上部安装有用于清理包装袋内部残留物料的清理组件;输送组件将包装袋输送至承接组件上,通过夹持组件将包装袋夹持固定,并与第一破包锥配合将包装袋扎破进行下料,下料完成后夹持组件外接输气设备使弧形管上的两个密封板打开对包装袋进行支撑,通过弧形管向包装袋内吹气,除尘组件使两个拨板往复拨动包装袋,加快包装袋内残留物料掉出速度。
6.更为优选的是,弧形管左部和右部均开有用于喷气的喷气孔。
7.更为优选的是,弧形管端部设置为便于扎破包装袋的圆锥状。
8.更为优选的是,承接组件包括有第一电动滑轨、第一电动滑块、第一固定架、承接板、第二限位板、导向辊和第一固定板;第一支撑架上侧前部和上侧后部各固接有一个第一
固定板;两个第一固定板相向侧各固接有一个第一电动滑轨;两个第一电动滑轨上各滑动连接有一个第一电动滑块;两个第一电动滑块相向侧固接有第一固定架;第一固定架右侧固接有承接板;承接板上侧左部固接有用于对包装袋进行限位的第二限位板;承接板前部和后部均转动连接有多个等距的导向辊。
9.更为优选的是,除尘组件包括有第二电动滑轨、第二电动滑块、第三固定架和吸尘单元;第一支撑架和第二支撑架前侧固接有一个第三固定架;第一支撑架和第二支撑架后侧固接有另一个第三固定架;两个第三固定架相向侧各固接有一个第二电动滑轨;两个第二电动滑轨左部和右部均滑动连接有一个第二电动滑块;左方的两个第二电动滑块连接有一个吸尘单元;右方的两个第二电动滑块连接有另一个吸尘单元;两个第三固定架均与夹持组件连接。
10.更为优选的是,左方的吸尘单元包括有防尘罩、第二固定架、圆筒、安装板、微型电机、第一传动杆、第二固定板、扇叶和缺齿轮;左方的两个第二电动滑块之间固接有防尘罩;防尘罩左侧前部和左侧后部各固接有一个第二固定架;两个第二固定架中各固接有一个圆筒;两个圆筒内壁左侧各固接有一个安装板;两个安装板上均安装有一个微型电机;两个微型电机输出轴各固接有一个第一传动杆;两个第一传动杆中部各固接有一个扇叶;两个第一传动杆右部各固接有一个缺齿轮;两个圆筒内壁右部各固接有一个第二固定板;两个第一传动杆各与一个第二固定板转动连接。
11.更为优选的是,夹持组件包括有第四固定架、第三电动滑轨、第三电动滑块和夹持单元;两个第三固定架上侧中部各固接有一个第四固定架;两个第四固定架相向侧各固接有一个第三电动滑轨;两个第三电动滑轨上部连接有清理组件;两个第三电动滑轨上各滑动连接有一个第三电动滑块;两个第三电动滑块相向侧各连接有一个夹持单元。
12.更为优选的是,前方的夹持单元包括有u形架、电动转轴、第三固定板、第一导气管、第二传动杆、第四固定板、第五固定板、限位滑轨、限位滑块、齿条和平齿轮;前方的第三电动滑块后侧固接有u形架;u形架后部安装有电动转轴;电动转轴转动部固接有第三固定板;第三固定板与三个等距的弧形管固接;三个弧形管各与一个第一导气管连通;u形架后部固接有第四固定板;第四固定板下部转动连接有第二传动杆;第二传动杆与u形架转动连接;第二传动杆与拨板固接;第二传动杆左部固接有平齿轮;u形架左侧固接有第五固定板;第五固定板后侧固接有限位滑轨;限位滑轨中滑动连接有限位滑块;限位滑块后侧固接有齿条;齿条与平齿轮传动连接。
13.更为优选的是,清理组件包括有第四电动滑块、第六固定板、l形板、电动推杆、第七固定板、第二导气管、第二破包锥和喷气单元;两个第三电动滑轨上部各滑动连接有一个第四电动滑块;两个第四电动滑块相向侧固接有第六固定板;第六固定板上侧前部和上侧后部各固接有一个l形板;两个l形板上各固接有一个电动推杆;两个电动推杆伸缩端固接有第七固定板;第六固定板中部固接有第二导气管;第二导气管底部固接有第二破包锥;第二导气管下部环形一周等距连接有四个喷气单元;四个喷气单元均与第七固定板连接;第七固定板与第二导气管滑动连接。
14.更为优选的是,右方的喷气单元包括有第五固定架、喷气管、拉绳、连接管和空心球;第二破包锥内右侧通过扭力弹簧轴连接有两个前后对侧的第五固定架;两个第五固定架之间固接有喷气管;喷气管上部固接有拉绳;拉绳末端与第七固定板固接;第二导气管下
部右侧连通有连接管;连接管右侧连通有空心球;喷气管与空心球滑动连接。
15.本发明的有益效果:本发明使用时实现了通过弧形管与拨板配合对包装袋进行夹持,下料完成后使弧形管松开包装袋通过密封板和喷气管从包装袋内部进行支撑,并从多个方向向包装袋内部吹气,同时通过拨板往复拍打包装袋,避免出现夹持位置物料无法掉落的问题,并使粘附在包装袋内表面的粉状物料掉落,并通过除尘组件对产生的粉尘进行收集,避免扬尘危害人体健康。
附图说明
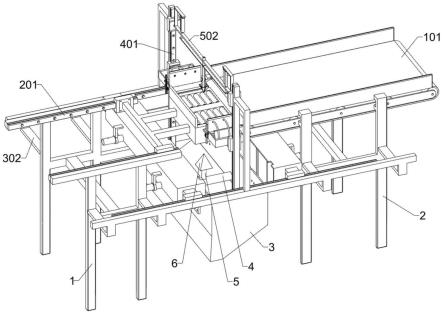
16.图1为本发明的机器人智能破包设备的第一种立体结构示意图;
17.图2为本发明的机器人智能破包设备的第二种立体结构示意图;
18.图3为本发明的机器人智能破包设备的第一局部立体结构示意图;
19.图4为本发明的机器人智能破包设备的第二局部立体结构示意图;
20.图5为本发明的机器人智能破包设备的除尘组件第一局部立体结构示意图;
21.图6为本发明的机器人智能破包设备的除尘组件第二局部立体结构示意图;
22.图7为本发明的机器人智能破包设备的第三局部立体结构示意图;
23.图8为本发明的机器人智能破包设备的第四局部立体结构示意图;
24.图9为本发明的机器人智能破包设备的夹持组件第一局部立体结构示意图;
25.图10为本发明的机器人智能破包设备的夹持组件第二局部立体结构示意图;
26.图11为本发明的机器人智能破包设备的夹持组件第三局部立体结构示意图;
27.图12为本发明的机器人智能破包设备的夹持组件第四局部立体结构示意图;
28.图13为本发明的机器人智能破包设备的清理组件第一局部立体结构示意图;
29.图14为本发明的机器人智能破包设备的清理组件第二局部立体结构示意图;
30.图15为本发明的机器人智能破包设备的清理组件第三局部立体结构示意图;
31.图16为本发明的机器人智能破包设备的清理组件第四局部立体结构示意图。
32.附图标记中:1-第一支撑架,2-第二支撑架,3-下料斗,4-固定杆,5-支撑杆,6-第一破包锥,101-输送带,102-第一限位板,201-第一电动滑轨,202-第一电动滑块,203-第一固定架,204-承接板,205-第二限位板,206-导向辊,207-第一固定板,301-第二电动滑轨,302-第二电动滑块,303-防尘罩,304-第二固定架,305-圆筒,306-安装板,307-微型电机,308-第一传动杆,309-第二固定板,310-扇叶,311-缺齿轮,312-第三固定架,401-第四固定架,402-第三电动滑轨,403-第三电动滑块,404-u形架,405-电动转轴,406-第三固定板,407-第一导气管,408-第二传动杆,409-第四固定板,410-拨板,411-第五固定板,412-限位滑轨,413-限位滑块,414-齿条,415-平齿轮,416-弧形管,417-密封板,001-喷气孔,501-第四电动滑块,502-第六固定板,503-l形板,504-电动推杆,505-第七固定板,506-第二导气管,507-第二破包锥,508-第五固定架,509-喷气管,510-拉绳,511-连接管,512-空心球。
具体实施方式
33.下面结合附图对本发明进行具体描述。
34.实施例
35.一种机器人智能破包设备,如图1-16所示,包括有第一支撑架1、第二支撑架2、下
料斗3、固定杆4、支撑杆5、第一破包锥6和输送组件;第一支撑架1的右方设置有第二支撑架2;第一支撑架1和第二支撑架2之间螺栓连接有下料斗3;下料斗3中部焊接有固定杆4;固定杆4中部焊接有支撑杆5;支撑杆5顶端焊接有第一破包锥6;第二支撑架2上侧安装有输送组件;
36.还包括有拨板410、弧形管416、密封板417、除尘组件和夹持组件;第一支撑架1和第二支撑架2上部安装有除尘组件;除尘组件中部安装有夹持组件;夹持组件与下料斗3连接;夹持组件上连接有两个前后对称的拨板410;夹持组件上连接有多个前后对侧的弧形管416;每个弧形管416左部和右部均通过扭力弹簧轴连接有一个密封板417;
37.还包括有承接组件和清理组件;第一支撑架1上侧安装有承接组件;夹持组件上部安装有清理组件。
38.弧形管416左部和右部均开有用于喷气的喷气孔001。
39.第四固定板409上开有便于弧形管416穿过的贯穿孔。
40.弧形管416端部设置为便于扎破包装袋的圆锥状。
41.输送组件包括有输送带101和第一限位板102;第二支撑架2上侧安装有输送带101;第二支撑架2上侧前部和上侧后部均焊接有一个第一限位板102;两个第一限位板102位于输送带101的上方。
42.承接组件包括有第一电动滑轨201、第一电动滑块202、第一固定架203、承接板204、第二限位板205、导向辊206和第一固定板207;第一支撑架1上侧前部和上侧后部各固接有一个第一固定板207;两个第一固定板207相向侧各固接有一个第一电动滑轨201;两个第一电动滑轨201上各滑动连接有一个第一电动滑块202;两个第一电动滑块202相向侧固接有第一固定架203;第一固定架203右侧固接有承接板204;承接板204上侧左部焊接有第二限位板205;承接板204前部和后部均转动连接有多个等距的导向辊206。
43.除尘组件包括有第二电动滑轨301、第二电动滑块302、第三固定架312和吸尘单元;第一支撑架1和第二支撑架2前侧固接有一个第三固定架312;第一支撑架1和第二支撑架2后侧固接有另一个第三固定架312;两个第三固定架312相向侧各固接有一个第二电动滑轨301;两个第二电动滑轨301左部和右部均滑动连接有一个第二电动滑块302;左方的两个第二电动滑块302连接有一个吸尘单元;右方的两个第二电动滑块302连接有另一个吸尘单元;两个第三固定架312均与夹持组件连接。
44.左方的吸尘单元包括有防尘罩303、第二固定架304、圆筒305、安装板306、微型电机307、第一传动杆308、第二固定板309、扇叶310和缺齿轮311;左方的两个第二电动滑块302之间固接有防尘罩303;防尘罩303左侧前部和左侧后部各固接有一个第二固定架304;两个第二固定架304中各固接有一个圆筒305;两个圆筒305内壁左侧各固接有一个安装板306;两个安装板306上均安装有一个微型电机307;两个微型电机307输出轴各固接有一个第一传动杆308;两个第一传动杆308中部各固接有一个扇叶310;两个第一传动杆308右部各固接有一个缺齿轮311;两个圆筒305内壁右部各固接有一个第二固定板309;两个第一传动杆308各与一个第二固定板309转动连接。
45.夹持组件包括有第四固定架401、第三电动滑轨402、第三电动滑块403和夹持单元;两个第三固定架312上侧中部各固接有一个第四固定架401;两个第四固定架401相向侧各固接有一个第三电动滑轨402;两个第三电动滑轨402上部连接有清理组件;两个第三电
动滑轨402上各滑动连接有一个第三电动滑块403;两个第三电动滑块403相向侧各连接有一个夹持单元。
46.前方的夹持单元包括有u形架404、电动转轴405、第三固定板406、第一导气管407、第二传动杆408、第四固定板409、第五固定板411、限位滑轨412、限位滑块413、齿条414和平齿轮415;前方的第三电动滑块403后侧固接有u形架404;u形架404后部安装有电动转轴405;电动转轴405转动部固接有第三固定板406;第三固定板406与三个等距的弧形管416固接;三个弧形管416各与一个第一导气管407连通;u形架404后部固接有第四固定板409;第四固定板409下部转动连接有第二传动杆408;第二传动杆408与u形架404转动连接;第二传动杆408与拨板410固接;第二传动杆408左部固接有平齿轮415;u形架404左侧固接有第五固定板411;第五固定板411后侧固接有限位滑轨412;限位滑轨412中滑动连接有限位滑块413;限位滑块413后侧固接有齿条414;齿条414与平齿轮415传动连接。
47.清理组件包括有第四电动滑块501、第六固定板502、l形板503、电动推杆504、第七固定板505、第二导气管506、第二破包锥507和喷气单元;两个第三电动滑轨402上部各滑动连接有一个第四电动滑块501;两个第四电动滑块501相向侧固接有第六固定板502;第六固定板502上侧前部和上侧后部各固接有一个l形板503;两个l形板503上各固接有一个电动推杆504;两个电动推杆504伸缩端固接有第七固定板505;第六固定板502中部固接有第二导气管506;第二导气管506底部固接有第二破包锥507;第二导气管506下部环形一周等距连接有四个喷气单元;四个喷气单元均与第七固定板505连接;第七固定板505与第二导气管506滑动连接。
48.第二破包锥507前部、后部、左部和右部均开有便于喷气单元工作的凹槽。
49.右方的喷气单元包括有第五固定架508、喷气管509、拉绳510、连接管511和空心球512;第二破包锥507内右侧通过扭力弹簧轴连接有两个前后对侧的第五固定架508;两个第五固定架508之间固接有喷气管509;喷气管509上部固接有拉绳510;拉绳510末端与第七固定板505固接;第二导气管506下部右侧连通有连接管511;连接管511右侧连通有空心球512;喷气管509与空心球512滑动连接。
50.空心球512上开有两个便于向喷气管509输送气体的通气孔。
51.工作时,在下料斗3下方放置收集箱用于收集粉状物料,通过输送带101将包装袋向左侧方向输送,进而将包装袋输送至承接板204上,同时包装袋带动导向辊206在承接板204中转动,直到包装袋被第二限位板205挡住,然后控制两个电动转轴405启动,以从左往右看为基准,前方的电动转轴405逆时针转动,后方的电动转轴405顺时针转动,电动转轴405转动带动第三固定板406转动,进而使第三固定板406上的弧形管416穿过第四固定板409扎入包装袋中,进而使包装袋和其中的粉状物料挤压拨板410,使拨板410带动第二传动杆408转动平齿轮415传动,平齿轮415带动齿条414向上移动,使限位滑块413在限位滑轨412中向上滑动至行程末端,进而使拨板410处于倾斜状态,并与弧形管416配合将包装袋夹住固定;
52.然后控制两个第一电动滑块202同时在两个第一电动滑轨201上向左侧方向滑动,进而使第一固定架203带动承接板204向左侧方向移动,使承接板204与包装袋分离,接着控制两个第三电动滑块403和两个第四电动滑块501同时在两个第三电动滑轨402上向下滑动,进而使包装袋向下移动,同时第六固定板502带动第二导气管506和第二破包锥507向下
移动,直到包装袋下表面与第一破包锥6接触,并被第一破包锥6扎破,此时两个第三电动滑块403反向滑动,直到使包装袋与第一破包锥6分离,与此同时两个第四电动滑块501继续向下滑动,使第二破包锥507将包装袋上表面扎破,然后第四电动滑块501再反向滑动使第二破包锥507与包装袋分离,此时包装袋上下表面均被扎破,并在下料斗3中进行下料,通过下料斗3将粉状物料收集到收集箱中,直到包装袋中物料无法自动掉落,接着再控制两个第四电动滑块501向下滑动,直到使喷气管509完全进入到包装袋中,由于此前第五固定架508与第二破包锥507连接处的扭力弹簧轴处于形变状态,接着控制两个电动推杆504同时伸长,推动第七固定板505在第二导气管506上向下滑动,进而第五固定架508与第二破包锥507连接处的扭力弹簧轴释放弹力,使喷气管509以第五固定架508与第二破包锥507连接处的扭力弹簧轴为轴发生转动,同时喷气管509在空心球512上滑动,直到喷气管509较长的部分处于水平状态,此时喷气管509与空心球512上通气孔连通,接着控制两个第四电动滑块501向上滑动,进而使喷气管509较长的部分与包装袋顶面互相接触,进而将包装袋支撑住,与此同时控制两个电动转轴405反向转动复位,同时通过第一导气管407外接气泵向弧形管416中输送气体,进而气体通过弧形管416上的喷气孔001喷出,进而使密封板417以与弧形管416连接处的扭力弹簧轴为轴发生转动,从而使弧形管416上的两个密封板417呈打开状态,直到密封板417与包装袋内表面互相接触,进而从内部支撑住包装袋,同时弧形管416通过喷气孔001向包装袋内部喷气,进而吹落包装袋内残留未掉落的粉状物料,与此同时,控制左方的两个第二电动滑块302同时向右侧方向滑动,控制右方的两个第二电动滑块302同时向左侧方向滑动,进而使两个防尘罩303互相靠近合并在一起,进而将下料斗3上侧罩住,防止粉尘从下料斗3上方逸出,防尘罩303移动同时使第二固定架304带动圆筒305移动,进而使第一传动杆308带动缺齿轮311移动,进而使缺齿轮311与平齿轮415互相啮合,接着第二导气管506通过导管外接气泵向第二导气管506中输送气体,进而气体通过连接管511和空心球512输送至喷气管509中,多个喷气单元工作原理相同,从而通过多个喷气管509在包装袋内向多个方向喷出气体,使包装袋内残留粉状物料掉落,与此同时控制微型电机307启动,微型电机307输出轴带动第一传动杆308转动,第一传动杆308带动扇叶310和缺齿轮311转动,扇叶310转动产生吸力,多个吸尘单元工作原理相同,进而将两个防尘罩303内产生的粉尘吸入圆筒305中,圆筒305通过外接导管和收集袋对粉尘进行收集,与此同时缺齿轮311转动带动平齿轮415转动,平齿轮415带动齿条414向下移动,使限位滑块413在限位滑轨412中向下滑动,缺齿轮311与平齿轮415脱离啮合时,缺齿轮311与齿条414啮合,带动齿条414向上移动,进而使限位滑块413在限位滑轨412中向上滑动,进而缺齿轮311转动使齿条414往复移动,使平齿轮415带动第二传动杆408往复转动,进而使拨板410往复摆动拍打包装袋,加快其中残留粉状物料的掉落速度,袋内残留粉状物料清理完成后,微型电机307关闭,所有外接气泵关闭,进而密封板417与弧形管416连接处的扭力弹簧释放弹力,使密封板417反向转动复位,四个第二电动滑块302反向滑动复位,第三电动滑块403和第四电动滑块501向上滑动,进而使包装袋向上移动,使包装袋高于承接板204上表面,然后两个第一电动滑块202反向滑动复位,使承接板204复位移动至包装袋下方,第三电动滑块403停止滑动,两个电动推杆504收缩复位,进而通过拉绳510拉动喷气管509复位,接着第四电动滑块501继续向上滑动,使第二破包锥507上升与包装袋分离,接着两个电动转轴405反转,进而使弧形管416复位至初始状态与包装袋分离,从而使包装袋掉落在承接板204上,然后两个第一电
动滑块202再向左侧方向滑动,进而使承接板204带动空包装袋向左侧方向移动,再通过现有设备将承接板204上的包装袋取下收集。
53.以上所述仅为本发明的实施例子而已,并不用于限制本发明。凡在本发明的原则之内,所作的等同替换,均应包含在本发明的保护范围之内。本发明未作详细阐述的内容属于本专业领域技术人员公知的已有技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1