乘客输送设备的梯路运行监控装置的制作方法
1.本发明属于乘客输送设备技术领域,尤其涉及一种乘客输送设备的梯路运行监控装置。
背景技术:
2.随着科技发展的日新月异、现代化建设的大力推进,自动扶梯、自动人行道等乘客输送设备已经成为人们日常工作生活中不可或缺的一部分,被广泛应用于商场、地铁等人群密集的场所。自动扶梯、自动人行道等乘客输送设备在给人们带来极大的方便的同时也带来了许多安全隐患,如出入口处梯级或踏板与梳齿板碰撞的安全隐患。
3.目前,针对自动扶梯、自动人行道等乘客输送设备在出入口处因梯级或踏板与梳齿板碰撞引起的安全问题,一般采用机械式的梳齿板安全装置进行检测,只有当梯级或踏板撞上梳齿板后才使梳齿板安全开关动作,从而使自动扶梯或自动人行道等停梯。而此时,撞击已致使梯级或踏板、梳齿板受力变形或者严重损坏,进而威胁到乘客的人身安全。
4.专利文献cn201710478005.9中,在梳齿板下方设置位移传感器以检测梳齿板与不断进入啮合区域的梯级或踏板间的位移量,当位移量超出一定阀值时触发控制系统。不足之处在于,因位移传感器设置在啮合区域的梳齿板下方,有效检测出位移量的前提是首先要求梯级或踏板能够顺利进行啮合区域,而事实上因异物卡入、错齿或梯级与踏板异常抬升导致的碰撞往往发生于梯级或踏板与梳齿板刚开始啮合的一瞬间。
5.专利文献cn202010724450.0中,在桁架内部设置光照范围传感器用于接收从两个梯级间的间隙照入桁架内部的外部光线,通过检测间隙值来实现对不同等级的风险进行预判。理论上,通过光照范围传感器可以较准确检测出梯级间隙值,但实际上光照极易受到外界环境等因素的影响,比如当乘客的脚或行李箱等正好同时处于两个梯级上,必然会使一部分梯级间隙被遮挡住,而此时通过光照范围传感器检测出可能是异物卡入等异常情况,故准确性没法得到保证。同时,虽然通过检测出的间隙值一定程度上可以反映出链条的拉伸异常,但对于因异物卡入、错齿或异常抬升等导致的梯级或踏板与梳齿板的碰撞问题很难有成效。
6.因此,研发一种能够对自动扶梯、自动人行道等乘客输送设备的梯路运行过程实现实时监控以确保能安全运行的监控装置迫在眉睫。
技术实现要素:
7.为解决上述技术问题,本发明提供一种乘客输送设备的梯路运行监控装置,包括:
8.雷达装置,设置在乘客输送设备梳齿板处的梯级或踏板下方,所述雷达装置发射并接受波信号,扫描相邻梯级或踏板间的衔接处,计算预设参数,将预设参数的计算值发送给控制装置;
9.控制装置,存储有预设参数的阈值,接收预设参数的计算值,将计算值与阈值相比较,当计算值超出阈值时输出报警信息;
10.优选地,所述预设参数包括如下的至少一个或多个:第一预设参数为相邻梯级或踏板的前缘与后缘的前后间隙,间隙x1和间隙x2,间隙x1和间隙x2相隔预设距离;第二预设参数为间隙x1和间隙x2差的绝对值;第三预设参数为间隙y1和间隙y2差的绝对值;间隙y1和间隙y2为相邻梯级或踏板的前缘与后缘的左右间隙,间隙y1和间隙y2相隔预设距离;第四预设参数为梯级或踏板的下表面距离预设基准点的距离z1和基准值z0差的绝对值;第五预设参数为相邻梯级或踏板之间的任意间隙。
11.优选地,所述第一预设参数的阈值为6mm,当间隙x1或间隙x2大于6mm时,控制装置输出第一报警信息。
12.优选地,所述第二预设参数的阈值为w,当|x1-x2|大于w时,控制装置输出第二报警信息。
13.优选地,w的取值范围为1mm~2mm。
14.优选地,所述第三预设参数的阈值为m,当|y1-y2|大于m时,控制装置输出第三报警信息。
15.优选地,m的取值范围为0.5mm~1mm。
16.优选地,所述第四预设参数的阈值为4mm,当|z1-z0|大于4mm时,控制装置输出第四报警信息。
17.优选地,所述第五预设参数的阈值为零,当相邻梯级或踏板之间的任意间隙为零时,控制装置输出第五报警信息。
18.优选地,所述雷达装置为毫米波雷达或激光雷达。
19.优选地,当控制装置输出报警信息时,所述控制装置还输出乘客输送设备停止运行的信号。
20.与现有技术相比,本发明通过上述预设参数的实际测量计算值与阈值相比较,据此在梯级或踏板与梳齿板啮合之前实现对梯路系统运行状态的预诊断,包括梯级或踏板的异常上抬或下陷、梯级间或踏板间有异物卡入、梯级或踏板间隙异常或错齿等。若预诊断有异常存在,则进一步采取警报、停梯等措施,从而避免潜在安全隐患的发生。
附图说明
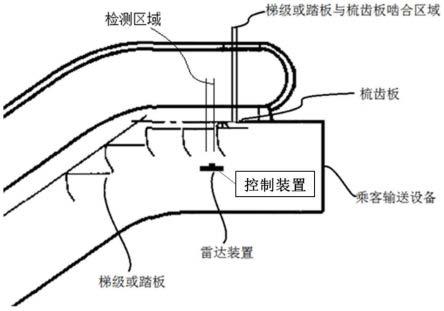
21.图1为本发明的乘客输送设备的梯路运行监控装置的结构示意图;
22.图2为各预设参数的示意图;
23.图3至图7为输出各报警信息是的梯级或踏板间隙示意图。
具体实施方式
24.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图对梯路运行监控装置的结构和工作过程做进一步详细说明。
25.如图1所示,本发明提供一种乘客输送设备的梯路运行监控装置,包括:
26.雷达装置,设置在乘客输送设备梳齿板处的梯级或踏板下方,所述雷达装置发射并接受波信号,扫描相邻梯级或踏板间的衔接处,计算预设参数,将预设参数的计算值发送给控制装置;
27.控制装置,存储有预设参数的阈值,接收预设参数的计算值,将计算值与阈值相比
较,当计算值超出阈值时输出报警信息;
28.所述雷达装置设置在梳齿板处的梯级或踏板下方的梯路系统内,同时在梯级或踏板进入与梳齿板啮合区域之前的附近区域。所述雷达装置与自动扶梯、自动人行道等乘客输送设备的控制装置相通讯连接,所述控制装置还可以与故障报警装置和乘客输送设备的制动系统相连接。
29.雷达装置可以是毫米波雷达或激光雷达等。所述雷达装置,以毫米波雷达为例,利用高频电路产生特定调制频率的电磁波,并通过天线发送电磁波和接收从目标反射回来的电磁波,通过发送和接收电磁波的参数来计算目标的各个参数。可以同时对多个目标进行测距、测速以及方位测量。
30.在本发明中,利用雷达装置可以实时获取相邻梯级或踏板间的实际啮合间隙模型。由于上述检测区域位于梯级或踏板进入与梳齿板啮合区域之前,因此可以通过对获取的相邻梯级或踏板间的的实际啮合间隙模型进行诊断,可以实现对梯路运行异常状态的实时监测。在此基础上,可以阻止梯级或踏板间异常的啮合状态进入到梯级或踏板与梳齿板啮合区域,从而可以避免梯级或踏板与梳齿板相碰撞等潜在安全隐患的发生。
31.如图2所示,乘客输送设备的梯路运行监控装置中,所述预设参数包括如下的至少一个或多个:
32.第一预设参数为相邻梯级或踏板的前缘与后缘的前后间隙,间隙x1和间隙x2,间隙x1和间隙x2相隔预设距离;第二预设参数为间隙x1和间隙x2差的绝对值;第三预设参数为间隙y1和间隙y2差的绝对值;间隙y1和间隙y2为相邻梯级或踏板的前缘与后缘的左右间隙,间隙y1和间隙y2相隔预设距离;第四预设参数为梯级或踏板的下表面距离预设基准点的距离z1和基准值z0差的绝对值;第五预设参数为相邻梯级或踏板之间的任意间隙。
33.下面进一步分别讲述各预设参数,与之对应的阈值和报警信息。
34.所述第一预设参数的阈值为6mm,当间隙x1或间隙x2大于6mm时,控制装置输出第一报警信息,若通过梯路运行监控装置测得的梯级或踏板实际啮合间隙如图3所示,即可判断梯路内该侧链条拉伸严重,存在梯级或踏板与梳齿板碰撞的隐患,发出警报、停梯并提示维保人员尽快调整链条的张紧情况。
35.所述第二预设参数的阈值为w,当|x1-x2|大于w时,控制装置输出第二报警信息。w的取值范围为1mm~2mm。若通过梯路运行监控装置测得的梯级或踏板实际啮合间隙如图4所示,呈现喇叭状,即|x1-x2|超出了理论啮合模型w的阀值,则可判断梯路左右两侧链条拉伸差异大,存在梯级或踏板与梳齿板碰撞的隐患,发出警报并提示维保人员尽快调整左右两侧链条的张紧情况。
36.所述第三预设参数的阈值为m,当|y1-y2|大于m时,控制装置输出第三报警信息。m的取值范围为0.5mm~1mm。若通过梯路运行监控装置测得的梯级或踏板实际啮合间隙如图5所示,即|y1-y2|超出了理论啮合模型w的阀值,则可判断梯路内错齿严重第三故障信号,同样存在梯级或踏板与梳齿板碰撞的隐患,发出警报并提示维保人员尽快调整梯路以消除错齿现象。
37.所述第四预设参数的阈值为4mm,当|z1-z0|大于4mm时,控制装置输出第四报警信息。若通过梯路运行监控装置测得的梯级或踏板实际啮合间隙如图6所示,即
38.|z1-z0|>4mm,则可判断相邻梯级或踏板存在上抬或下陷的异常情况,极易造成
梯级或踏板与梳齿板的碰撞,发出警报、停梯并提示维保人员立刻查找导致异常上抬或下陷的原因。
39.所述第五预设参数的阈值为零,当相邻梯级或踏板之间的任意间隙为零时,控制装置输出第五报警信息。若通过梯路运行监控装置测得的梯级或踏板实际啮合间隙如图7所示,即在梯级或踏板间隙内存在阴影区域,任意间隙为零,则可判断相邻梯级或踏板间隙内有异物卡入,极易造成梯级或踏板与梳齿板的碰撞,发出警报、停梯并提示维保人员立刻清除卡入的异物。
40.此外,当控制装置输出报警信息时,所述控制装置还输出乘客输送设备停止运行的信号,使乘客输送设备停止运行。
41.通过上述预设参数的实际测量计算值与阈值相比较,据此在梯级或踏板与梳齿板啮合之前实现对梯路系统运行状态的预诊断,包括梯级或踏板的异常上抬或下陷、梯级间或踏板间有异物卡入、梯级或踏板间隙异常或错齿等。若预诊断有异常存在,则进一步采取警报、停梯等措施,从而避免潜在安全隐患的发生。
42.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1