物体夹持顺序确定方法、装置、设备及存储介质与流程
本技术实施例涉及机器人领域或智能物流,尤其涉及一种物体夹持顺序确定方法、装置、设备及存储介质。
背景技术:
1、在物流仓储领域等需要无人拣选操作的场景中,通常会涉及到由夹具将放置在待抓取区域的目标物体夹取到另一个指定的区域,如从购物篮中取出购买的商品并放至扫码设备前进行扫码,由于每次需要夹取的目标物体的种类和形状预先未知,因此,需要在每次夹取时,通过对目标物体进行识别,以调整夹具的角度、位置等参数,以稳定夹持目标物体。当待抓取区域存在多个待夹取的目标物体时,还需要判断首先夹取哪一个物体,才能保证每个物体都能稳定夹持,避免夹持失败。
2、现有技术中的夹持顺序判断一般是对位于同一高度相互没有遮挡的目标物体进行排序,如果目标物体之间存在相互重叠,则无法判断先夹持哪个物体。
技术实现思路
1、本技术实施例提供了一种物体夹持顺序确定方法、装置、设备及存储介质,能够快速准确确定多个目标物体的夹持顺序。
2、第一方面,本技术实施例提供了一种物体夹持顺序确定方法,物体夹持顺序确定方法包括:
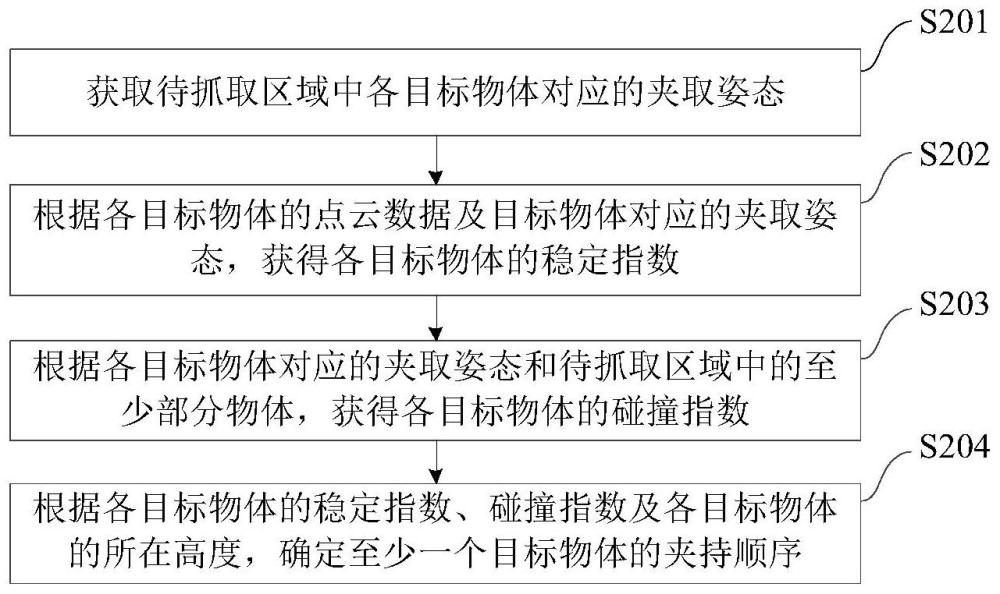
3、获取待抓取区域中各目标物体对应的夹取姿态,夹取姿态用于表示夹具在夹取目标物体时的姿态;
4、根据各目标物体的点云数据及目标物体对应的夹取姿态,获得各目标物体的稳定指数,稳定指数用于表示夹具在夹取姿态下夹持对应目标物体的稳定程度;
5、根据各目标物体对应的夹取姿态和待抓取区域中的至少部分物体,获得各目标物体的碰撞指数,碰撞指数用于表示夹具在夹取姿态下与待抓取区域的目标物体和待抓取区域中的非目标物体发生碰撞的概率;
6、根据各目标物体的稳定指数、碰撞指数及各目标物体的所在高度,确定至少一个目标物体的夹持顺序。
7、可选地,获取待抓取区域中各目标物体对应的夹取姿态,包括:获取待抓取区域的点云数据;基于点云数据中各数据点间的位置关系,确定待抓取区域中的各目标物体,数据点与目标物体相对应;基于各目标物体的点云数据,获取各目标物体对应的备选夹取姿态;确定满足设定条件的各目标物体对应的备选夹取姿态为各目标物体的夹取姿态,设定条件包括备选夹具姿态中对应夹具与目标物体发生碰撞的概率和夹具夹持目标物体的稳定指数。
8、可选地,根据各目标物体的点云数据及目标物体对应的夹取姿态,获得各目标物体的稳定指数,包括:根据目标物体对应夹取姿态下夹具法向量与目标物体的法向量,确定夹具与目标物体的法向量间的余弦值;根据各目标物体对应夹取姿态下的余弦值、夹具与目标物体中心点的距离、夹具的张开宽度,确定目标物体的稳定指数。
9、可选地,根据各目标物体对应的夹取姿态和待抓取区域中的至少部分物体,获得各目标物体的碰撞指数,包括:根据夹取姿态下的夹具与对应目标物体的点云数据中的数据点与相重叠的数据点数量,确定夹取姿态下夹具与对应目标物体发生碰撞的概率;根据夹取姿态下的夹具与待抓取区域中非目标物体的点云数据中的数据点与相重叠的数据点数量,确定夹取姿态下夹具与非目标物体发生碰撞的概率;根据各目标物体对应的夹取姿态下夹具与对应目标物体和待抓取区域中非目标物体发生碰撞的概率,确定各目标物体的碰撞指数。
10、可选地,根据各目标物体的稳定指数、碰撞指数及各目标物体的所在高度,确定至少一个目标物体的夹持顺序,包括:基于各目标物体的所在高度,对所在高度进行归一化处理;根据碰撞指数、稳定指数和归一化处理后的所在高度,确定至少一个目标物体的夹持顺序。
11、可选地,根据各目标物体的稳定指数、碰撞指数及各目标物体的所在高度,确定至少一个目标物体的夹持顺序,包括:根据碰撞指数、稳定指数和各目标物体的所在高度的融合排序,确定至少一个目标物体的夹持顺序。
12、可选地,根据碰撞指数、稳定指数和各目标物体的所在高度的融合排序,确定至少一个目标物体的夹持顺序,包括:根据碰撞指数、稳定指数和各目标物体的所在高度分别与对应权重系数相乘后的结果的融合排序,确定至少一个目标物体的夹持顺序。
13、第二方面,本技术实施例提供了一种物体夹持顺序确定装置,该物体夹持顺序确定装置包括:
14、获取模块,用于获取待抓取区域中各目标物体对应的夹取姿态,夹取姿态用于表示夹具在夹取目标物体时的姿态;
15、第一确定模块,用于根据各目标物体的点云数据及目标物体对应的夹取姿态,获得各目标物体的稳定指数,稳定指数用于表示夹具在夹取姿态下夹持对应目标物体的稳定程度;
16、第二确定模块,用于根据各目标物体对应的夹取姿态和待抓取区域中的至少部分物体,获得各目标物体的碰撞指数,碰撞指数用于表示夹具在夹取姿态下与待抓取区域的目标物体和待抓取区域中的非目标物体发生碰撞的概率;
17、排序模块,用于根据各目标物体的稳定指数、碰撞指数及各目标物体的所在高度,确定至少一个目标物体的夹持顺序。
18、可选地,获取模块具体用于,获取待抓取区域的点云数据;基于点云数据中各数据点间的位置关系,确定待抓取区域中的各目标物体,数据点与目标物体相对应;基于各目标物体的点云数据,获取各目标物体对应的备选夹取姿态;确定满足设定条件的各目标物体对应的备选夹取姿态为各目标物体的夹取姿态,设定条件包括备选夹具姿态中对应夹具与目标物体发生碰撞的概率和夹具夹持目标物体的稳定指数。
19、可选地,第一确定模块具体用于,根据目标物体对应夹取姿态下夹具法向量与目标物体的法向量,确定夹具与目标物体的法向量间的余弦值;根据各目标物体对应夹取姿态下的余弦值、夹具与目标物体中心点的距离、夹具的张开宽度,确定目标物体的稳定指数。
20、可选地,第二确定模块具体用于,根据夹取姿态下的夹具与对应目标物体的点云数据中的数据点与相重叠的数据点数量,确定夹取姿态下夹具与对应目标物体发生碰撞的概率;根据夹取姿态下的夹具与待抓取区域中非目标物体的点云数据中的数据点与相重叠的数据点数量,确定夹取姿态下夹具与非目标物体发生碰撞的概率;根据各目标物体对应的夹取姿态下夹具与对应目标物体和待抓取区域中非目标物体发生碰撞的概率,确定各目标物体的碰撞指数。
21、可选地,排序模块具体用于,基于各目标物体的所在高度,对所在高度进行归一化处理;根据碰撞指数、稳定指数和归一化处理后的所在高度,确定至少一个目标物体的夹持顺序。
22、可选地,排序模块具体用于,根据碰撞指数、稳定指数和各目标物体的所在高度的融合排序,确定至少一个目标物体的夹持顺序。
23、可选地,排序模块具体用于,根据碰撞指数、稳定指数和各目标物体的所在高度分别与对应权重系数相乘后的结果的融合排序,确定至少一个目标物体的夹持顺序。
24、第三方面,本技术实施例还提供了一种控制设备,该控制设备包括:
25、至少一个处理器;
26、以及与至少一个处理器通信连接的存储器;
27、其中,存储器存储有可被至少一个处理器执行的指令,指令被至少一个处理器执行,以使控制设备执行如本技术实施例第一方面中任一实施例对应的物体夹持顺序确定方法。
28、第四方面,本技术实施例还提供了一种计算机可读存储介质,计算机可读存储介质中存储有计算机执行指令,计算机执行指令被处理器执行时用于实现如本技术实施例第一方面任一的物体夹持顺序确定方法。
29、第五方面,本公开还提供了一种计算机程序产品,该程序产品包含计算机执行指令,计算机执行指令被处理器执行时用于实现如本公开第一方面对应的任意实施例的物体夹持顺序确定方法。
30、本技术实施例提供的物体夹持顺序确定方法、装置、设备及存储介质,通过获取待抓取区域中各目标物体对应的夹取姿态,然后根据各目标物体的点云数据及夹取姿态,获得各目标物体的稳定指数,根据各目标物体对应的夹取姿态和待抓取区域中的至少部分物体,获得各目标物体的碰撞指数,然后根据稳定指数、碰撞指数及各目标物体的所在高度,确定夹持顺序。由此,使得夹具每次夹取待抓取区域的目标物体时,都能将稳定程度最高、与其他物体碰撞程度最小的目标物体夹起,从而保证每次夹取时的成功率,避免夹持目标物体时被其他重叠的物体影响,导致夹取失败,同时保证确定的高效率。
- 还没有人留言评论。精彩留言会获得点赞!