一种塔式起重机安全评估预警方法和系统与流程
1.本发明涉及工程机械技术领域,具体涉及一种塔式起重机安全评估预警方法和系统
背景技术:
2.塔式起重机具有起升高度高、工作幅度大、易拆装等特点,在民用建筑和工业建设等领域中应用广泛。
3.塔式起重机主要由基座、塔身、转台、起重臂、提升机构、平衡臂和驾驶室构成,基座和塔身起支持作用,转台用于驱动起重臂和平衡臂转动且用于提供制动扭矩使起重臂保持在当前角度位置,以防止起重臂自由摆动,提升机构用于提升货物。
4.在塔身处于完全竖直的状态下,转台处于完全水平的状态,此时起重臂对转台不会产生偏转扭矩;而当塔身发生倾斜时,转台的水平状态被打破,起重臂对转台就会产生较大的偏转扭矩,尤其是当起重臂载重较大时,这就会使转台受到额外的应力。要使起重臂平稳摆动或是保持在当前角度位置,就需要转台输出扭矩来抵消偏转扭矩。
5.但是,当起重臂载重较大时或是塔身的倾斜角度较大时,起重臂的偏转扭矩都会变得很大,对转台造成较大负担,可能会导致转台受损,起重臂的偏转扭矩甚至可能超出转台的最大输出扭矩,导致起重臂失控,造成严重的安全事故。
6.基于上述原因,亟需设计一种针对起重臂的偏转扭矩监控和预警的方案。
技术实现要素:
7.基于上述表述,本发明提供了塔式起重机安全评估预警方法和系统,以实现对起重臂的偏转扭矩评估和预警。
8.本发明解决上述技术问题的技术方案如下:
9.一种塔式起重机安全评估预警方法,包括以下步骤:
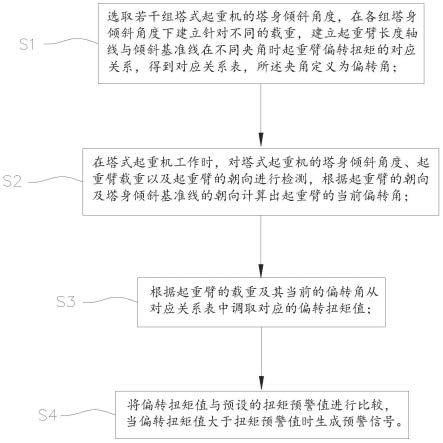
10.s1.选取若干组塔式起重机的塔身倾斜角度,在各组塔身倾斜角度下针对不同的载重建立起重臂长度轴线与倾斜基准线在不同夹角时起重臂偏转扭矩的对应关系,得到对应关系表,夹角定义为起重臂偏转角;
11.s2.在塔式起重机工作时,对塔式起重机的塔身倾斜角、起重臂载重以及起重臂的朝向进行检测,根据起重臂的朝向及塔身倾斜基准线的朝向计算出起重臂的当前偏转角;
12.s3.根据当前塔身倾斜角、起重臂偏转角以及起重臂载重,从对应关系表中调取对应的偏转扭矩值;
13.s4.将偏转扭矩值与预设的扭矩预警值进行比较,当偏转扭矩值大于扭矩预警值时生成预警信号。
14.作为优选方案:对于起重臂上倾和下倾分别设置纠正因子x1和x2,其中x1=(1+k*θ1)、x2=(1-k*θ2),式中k为一常数、θ1为起重臂的上倾角度θ2为起重臂的下倾角度;在塔式起重机工作时检测起重臂的倾斜角度,若起重臂处于倾斜状态,则根据其倾斜角度获取
纠正因子,将调取的偏转扭矩值与纠正因子相乘,得到纠正后的偏转扭矩值,将纠正后的偏转扭矩值与扭矩预警值进行比较,当前者大于后者时生成预警信号。
15.作为优选方案:设置第一扭矩预警值和第二扭矩预警值,其中第一扭矩预警值小于第二扭矩预警值,当偏转扭矩大于第一扭矩预警值时通过向塔式起重机平衡臂增加配重来增加平衡扭矩,当偏转扭矩大于第二扭矩预警值时,发出预警信号。
16.作为优选方案:当塔身处于倾斜状态时,在塔式起重机工作时,对塔身的倾斜角度实时检测,当塔身倾斜角度发生变化时,根据当前的塔身倾斜角度、起重臂朝向和载重调取新的偏转扭矩值,将新的偏转扭矩值与扭矩预警值进行比较,当前者大于后者时生成预警信号。
17.一种塔式起重机安全评估预警系统,包括:
18.第一倾斜角度检测装置,其用于检测塔式起重机的塔身倾斜方向和倾斜角度,并输出检测结果;
19.转动角度检测装置,其用于检测起重臂所在的角度位置及起重臂转过的角度,并输出检测结果;
20.载重检测装置,其用于检测起重臂的载重,并输出检测结果;
21.控制装置,其与第一倾斜角度检测装置、转动角度检测装置以及载重检测装置连接,用以接收第一倾斜角度检测装置、第二倾斜角度检测装置以及载重检测装置输出的检测结果,并根据塔身的倾斜角度、起重臂的角度位置计算出起重臂的偏转角,且根据起重臂的载重匹配起重臂的当前偏转扭矩,将起重臂的偏转扭矩与扭矩预警值进行比较,当前者大于后者时生成预警信号。
22.作为优选方案:还包括与控制装置连接的第二倾斜角度检测装置,所述第二倾斜角度检测装置用于检测塔式起重机的起重臂的上下倾斜角度,并向控制装置输出检测结果,所述控制装置根据起重臂的上下倾斜角度匹配纠正因子,并将调取的偏转扭矩值与纠正因子相乘,得到纠正后的偏转扭矩值,再将纠正后的偏转扭矩值与扭矩预警值进行比较,当前者大于后者时生成预警信号。
23.作为优选方案:还包括配重调节机构,所述调节机构包括沿平衡臂的长度方向安装于平衡臂上的导轨,所述上装有配重块,所述配重块与导轨滑移连接并可沿导轨的长度方向来回滑动,所述平衡梁上还装有驱动电机,所述驱动电机的输出轴同轴连接有丝杆,所述丝杆平行于导轨,丝杆穿过导轨并与配重块螺纹连接,所述丝杆的端部设置有连接块,所述块与平衡梁固定,所述的端部与连接块转动连接。
24.作为优选方案:所述第一倾斜角度检测装置包括安装于塔身内部中心的陀螺仪传感器。
25.作为优选方案:所述第二倾斜角度检测装置包括设置于塔尖的激光发射装置和设置于起重臂前端的激光接收装置,所述激光发射装置包括调节电机和激光发射器,所述调节电机安装在塔尖上,所述激光发射器的壳体通过连接部与调节电机的转轴连接固定,所述激光发射器朝向激光接收装置,所述电机与第一电机驱动模块连接。与现有技术相比,本技术的技术方案具有以下有益技术效果:通过该方案可以对塔式起重机的起重臂的偏转扭矩实时监测,并能结合塔式起重机的塔身倾斜角度、起重臂的载重以及起重臂的摆动角度进行针对性精细化安全评估和预警,大大提高塔式起重机运行的安全性,有效防止安全事
故的发生。
附图说明
26.图1为实施例一中的方法流程图;
27.图2为实施例二中的电路原理图;
28.图3为实施例二中的起重机的结构示意图;
29.图4为图3中的a部放大图;
30.图5为图3中的b部放大图。
31.附图标记说明:
32.1、基座;2、塔身;3、转台;4、驾驶室;5、起重臂;6、平衡臂;7、起重钩;8、称重托盘;9、导轨;10、配重块;11、连接块;12、丝杆;13、驱动电机;14、塔尖;15、激光发射器;16、连接部;17、调节电机;18、转轴;19、激光接收装置;20、陀螺仪传感器;21、角度编码器。
具体实施方式
33.实施例一:
34.一种塔式起重机安全评估预警方法,其特征是,包括以下步骤:
35.s1.选取若干组塔式起重机的塔身倾斜角度,在各组塔身倾斜角度下针对不同的载重建立起重臂长度轴线与倾斜基准线在不同夹角时起重臂偏转扭矩的对应关系,得到对应关系表,夹角定义为起重臂偏转角;
36.通过搭建塔式起重机的等比例缩小模型,用缩小模型进行试验。具体的:
37.将缩小模型的塔身调节至第一倾斜角度,在塔身当前的倾斜角度下,确定塔身的倾斜基准线,倾斜基准线以转台的转动圆面为参考面,选取圆面的圆周边缘上的高度位置最低的一点,将该点与圆周面的圆心连线,该连线即为倾斜基准线。
38.以该倾斜基准线为零角度线,通过安装在转台上的角度编码器检测起重臂的当前角度,该角度即为起重臂长度轴线与倾斜基准线之间的夹角。
39.在当前的塔身倾斜角度下,在第一载重情况下,将起重臂摆动至不同的角度,并测量起重臂在不同摆动角度时的偏转扭矩;在第二载重、第三载重
……
的情况下重复上述步骤。
40.改变塔身至第二倾斜角度,在第一载重、第二载重、第三载重
……
的情况上重复上述步骤。
41.如此便得到了塔身倾斜角、起重臂偏转角、起重臂载重和起重臂偏转扭矩的对应关系,得到对应关系表。
42.s2.在塔式起重机工作时,对塔式起重机的塔身倾斜角、起重臂载重以及起重臂的朝向进行检测,根据起重臂的朝向及塔身倾斜基准线的朝向计算出起重臂的当前偏转角;
43.通过陀螺仪传感器对塔身的倾斜角度进行检测,通过称重托盘装在货物并称得货物的重量,即为起重臂的载重,通过角度编码器检测起重臂的摆动角度。根据起重臂的朝向及塔身倾斜基准线的朝向计算出起重臂的当前偏转角。
44.s3.根据当前塔身倾斜角、起重臂偏转角以及起重臂载重,从对应关系表中调取对应的偏转扭矩值;
45.s4.将偏转扭矩值与预设的扭矩预警值进行比较,当偏转扭矩值大于扭矩预警值时生成预警信号。
46.如此可以实现对起重臂偏转扭矩的实时监测预警,预防发生安全事故。
47.考虑到起重臂在实际的工作环境中可能会上倾或下倾,在相同的载重下,上倾或下倾都会使起重臂的偏转扭矩发生变化,因此在评估偏转扭矩时,需要考虑起重臂的倾斜状态。
48.本实施例中:对于起重臂上倾和下倾分别设置纠正因子x1和x2,其中x1=(1+k*θ1)、x2=(1-k*θ2),式中k为一常数、θ1为起重臂的上倾角度θ2为起重臂的下倾角度;在塔式起重机工作时检测起重臂的倾斜角度,若起重臂处于倾斜状态,则根据其倾斜角度获取纠正因子,将调取的偏转扭矩值与纠正因子相乘,得到纠正后的偏转扭矩值,将纠正后的偏转扭矩值与扭矩预警值进行比较,当前者大于后者时生成预警信号。
49.本实施例中:设置第一扭矩预警值和第二扭矩预警值,其中第一扭矩预警值小于第二扭矩预警值,当偏转扭矩大于第一扭矩预警值时通过向塔式起重机平衡臂增加配重来增加平衡扭矩,当偏转扭矩大于第二扭矩预警值时,发出预警信号。
50.当偏转扭矩达到第一扭矩预警值时,通过增加平衡臂的配重,使平衡臂作用于转台的平衡扭矩增大,以部分抵消或削弱起重臂作用于转台的偏转扭矩,起到保护转台,提高安全性的目的,减少不必要的预警次数;而当上述措施不能有效抵消偏转扭矩时,偏转扭矩继续增大至第二扭矩预警值,此时起重臂的偏转扭矩较大,可能对转台造成不利影响,此时生产预警信号。
51.作为优选方案:当塔身处于倾斜状态时,在塔式起重机工作时,对塔身的倾斜角度实时检测,当塔身倾斜角度发生变化时,根据当前的塔身倾斜角度、起重臂朝向和载重调取新的偏转扭矩值,将新的偏转扭矩值与扭矩预警值进行比较,当前者大于后者时生成预警信号。
52.实施例二:
53.一种塔式起重机安全评估预警系统,包括:
54.第一倾斜角度检测装置,其用于检测塔式起重机的塔身2倾斜方向和倾斜角度,并输出检测结果;
55.参照图3,本实施例中第一倾斜角度检测装置包括安装于塔身2内部中心的陀螺仪传感器20,当塔身2倾斜时陀螺仪传感器20输出对应的角度和方向信息。
56.转动角度检测装置,其用于检测起重臂5所在的角度位置及起重臂5转过的角度,并输出检测结果;
57.参照图3,本实施例中的转动角度检测装置为角度编码器21,角度编码器21安装于转台3底部并与转台3传动连接,当转台3转动时会带动角度编码器21同步转动,从而改变角度编码器21输出的角度值,通过角度值的变化即可得知起重臂5转过的角度。
58.载重检测装置,其用于检测起重臂5的载重,并输出检测结果;
59.参照图4,本实施例中的载重检测装置为称重托盘8,称重托盘8通过缆绳与起重臂5的起重钩7连接。将货物码放在称重托盘8上时,称重托盘8会输出货物的重量信息。
60.控制装置,其与第一倾斜角度检测装置、转动角度检测装置以及载重检测装置连接,其用以接收第一倾斜角度检测装置、转动角度检测装置以及载重检测装置输出的检测
结果,并根据塔身2的倾斜角度、起重臂5的角度位置计算出起重臂5的偏转角,且根据起重臂5的载重匹配起重臂5的当前偏转扭矩,将起重臂5的偏转扭矩与扭矩预警值进行比较,当前者大于后者时生成预警信号。
61.参照图2,本实施例中的控制装置包括主控模块,还包括与主控模块连接的信号采集模块、报警模块、第一电机驱动模块、第二电机驱动模块、报警模块、通信模块和电源模块。
62.陀螺仪传感器20、角度编码器21和称重托盘8的信号输出端与信号采集模块的输入端连接,称重托盘8与信号采集模块之间可以是采用线缆连接,也可以是无线连接(使用无线称重托盘8)。
63.本实施例中:还包括与控制装置连接的第二倾斜角度检测装置,第二倾斜角度检测装置用于检测塔式起重机的起重臂5的上下倾斜角度,并向控制装置输出检测结果,控制装置根据起重臂5的上下倾斜角度匹配纠正因子,并将调取的偏转扭矩值与纠正因子相乘,得到纠正后的偏转扭矩值,再将纠正后的偏转扭矩值与扭矩预警值进行比较,当前者大于后者时生成预警信号。
64.参照图3和图5,本实施例中的第二倾斜角度检测装置包括设置于塔尖14的激光发射装置和设置于起重臂5前端的激光接收装置19。激光发射装置包括调节电机17和激光发射器15,调节电机17安装在塔尖14上,激光发射器15的壳体通过连接部16与调节电机17的转轴18连接固定,通过控制调节电机17转动可以驱动激光发射器15转动,从而调节激光发射器15的俯仰角度,激光发射器15朝向激光接收装置19。
65.调节电机17与第一电机驱动模块连接。
66.激光发射器15与主控模块连接,激光接收装置19与信号采样模块连接,主控模块向激光发射器15发送指令信号,使激光接收器发出激光信号,激光接收装置19接收到激光信号后向信号采集模块输出一反馈信号。
67.在起重臂5未载重时,将激光发射器15对准激光接收装置19,即完成了对激光系统的校准。当起重臂5载重运行时,当起重臂5发生上倾或下倾时,激光接收装置19将无法接收到激光信号。当激光接收器装置无法接收到激光信号时,主控模块向调节电机17发送脉冲信号,使调节电机17步进转动,从而慢慢调节激光发射器15的俯仰角度,直至激光接收装置19重新接收到激光信号,主控模块通过统计脉冲信号的数量结合调节电机17的步幅即可获知激光发射器15的调节角度,将此角度认为是起重臂5的倾斜角度。这种检测方式能综合检测到起重臂5本身的倾斜角度和因起重臂5的弯曲造成的倾斜角度,检测的结果与实际情况更匹配。
68.本实施例中:还包括配重调节机构,配重调节机构包括沿平衡臂6的长度方向安装于平衡臂6上的导轨9,导轨9上装有配重块10,配重块10与导轨9滑移连接并可沿导轨9的长度方向来回滑动,在平衡梁上还装有驱动电机13,驱动电机13的输出轴同轴连接有丝杆12,丝杆12平行于导轨9,丝杆12穿过导轨9并与配重块10螺纹连接,在丝杆12的端部设置有连接块11,连接块11与平衡梁固定,丝杆12的端部与连接块11转动连接。驱动电机13转动带动丝杆12同步转动,从而驱动配重块10沿导轨9滑动,即可以调节配重块10在平衡梁上的位置,从而改变平衡梁的重心位置。从而可以通过改变平衡梁的位置来改变平衡梁的反作用扭矩,通过增大反作用扭矩来更好地抵消起重臂5的偏转扭矩。
69.驱动电机13与第二电机驱动模块连接。
70.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1