一种自动真空包装机的制作方法
1.本技术涉及真空包装设备的技术领域,尤其是涉及一种自动真空包装机。
背景技术:
2.真空包装机能够自动抽出包装袋内的空气,达到预定真空度后完成封口工序。亦可再充入氮气或其它混合气体,然后完成封口工序。真空包装机常被用于食品、芯片行业,因为经过真空包装以后,食品或芯片能够抗氧化,从而达到长期保存的目的。
3.芯片生产加工完成后,通常将芯片置于料板上进行存储,芯片置于料板上开设的置物槽内,料板对芯片起到一定的承载保护作用,同时边便于芯片的转运。如果芯片暴露在空气中,容易发生氧化,氧化过程会对芯片的性能产生影响,甚至影响芯片的成品合格率,故还会在料板外套设包装袋,并使用真空包装机对包装袋进行抽真空和密封处理,实现芯片的密封包装,起到隔绝空气的作用。
4.相关技术中的真空包装机包括真空泵、连接在所述真空泵抽气口端部的抽气管以及热封板,对料板进行真空密封时,操作人员首先将包装袋套设安装在料板上,然后将抽气管伸入包装袋内,驱动真空泵工作对包装袋内的空气进行抽吸,最后使用热封板热压在包装袋的开口端实现对包装袋的热封。
5.针对上述中的相关技术,发明人发现相关技术中的料板在进行真空热封时,需要人工将包装袋套设安装在料板上,并且在抽真空过程中以及热封过程中,都需要人工辅助进行抽气管在包装袋内的抽送以及包装袋与热封座的位置定位,存在真空热封装置自动化程度不高的问题。
技术实现要素:
6.为了改善真空热封装置自动化程度不高的问题,本技术提供一种自动真空包装机。
7.本技术提供的一种自动真空包装机采用如下的技术方案:一种自动真空包装机,包括安装支架、用于输送料板的输送装置、用于放置包装袋的包装袋堆叠架、用于对输送装置输送的料板以及包装袋进行承载的承载装置、用于将包装袋堆叠架上的单个包装袋移运至承载装置处的移运装置、用于对包装袋进行开口的开口装置、用于对包装袋内的空气进行抽吸的真空装置、用于对所述包装袋进行封口的热封装置以及用于对热封后的包装袋进行转运的转运装置,所述输送装置、所述包装袋堆叠架、所述承载装置、所述移运装置、所述开口装置、所述真空装置、所述热封装置以及所述转运装置均固定安装在所述安装支架上。
8.通过采用上述技术方案,真空包装机工作时,移运装置将包装袋堆叠架上堆叠的包装袋移运至承载装置上,承载装置对包装袋进行承载,并对包装袋进行初始的固定,之后开口装置对包装袋的开口端打开,承载装置、移运装置相互配合对包装袋的外壁进行抽拉,使得包装袋的内腔打开,输送装置将料板输送至承载装置上,料板沿包装袋的开口端进入
包装袋内,真空装置对包装袋内的空气进行抽吸,待包装袋内达到要求的真空度之后真空装置从包装袋内抽离,热封装置对包装袋的开口端进行热封,最后转运装置将热封完成后的包装袋进行转运,实现真空热封后料板的转运。
9.通过设置输送装置、包装袋堆叠架、承载装置、移运装置、开口装置、真空装置、热封装置以及转运装置相互配合,共同完成料板上包装袋的密封,实现了包装袋对料板的全自动真空密封,无需人工进行辅助真空密封操作,提高了真空热封装置的自动化程度。
10.可选的,所述真空装置包括固定安装在所述安装支架上的第一滑座、滑动安装在所述第一滑座上的第一滑台、固定安装在所述第一滑台上的抽气管以及固定安装在所述安装支架上的真空泵,所述真空泵的抽气口与所述抽气管相连通。
11.通过采用上述技术方案,通过设置真空装置、真空装置工作时,第一滑台沿靠近包装袋的方向在第一滑座上发生位移,使得抽气管伸入包装袋的内腔内,之后驱动真空泵工作,对包装袋内的空气进行抽吸,使得包装袋内呈真空状态,以此实现包装袋内的抽真空。
12.可选的,还包括推压装置,所述推压装置包括固定安装在所述安装支架上的第二滑座,滑动安装在所述第二滑座上的第二滑台以及用于将所述料板推入包装袋底的推板,所述推板固定安装在所述第二滑台上,所述推板上开设有避让槽,所述抽气管置于所述避让槽处。
13.通过采用上述技术方案,通过设置推压装置,推压装置工作时,第二滑台沿靠近包装袋的方向在第二滑座上发生位移,使得推板作用在料板上,并将料板推入至包装袋袋底,之后第二滑台沿远离包装袋的方向在第二滑座上发生位移,其自身恢复至初始位置等待下一料板的递推。输送装置将料板移运至承载装置上的过程中,料板由于其自身惯性不足的原因,料斗本身可能无法完全穿过包装袋的开口进入包装袋内,导致后期包装袋无法进行封装,推板将料板推入包装袋内,有效改善了这一问题。
14.可选的,还包括夹持装置,所述夹持装置的数量至少设置为两个,且分别位于所述承载装置的两侧,所述夹持装置包括固定安装在所述安装支架上的夹持滑座,滑动安装在所述夹持滑座上的夹持滑台,以及滑动安装在所述夹持滑台上的两夹板,所述夹板在所述夹持滑台上的滑移方向与所述夹持滑台在所述夹持滑座上的滑移方向垂直设置。
15.通过采用上述技术方案,通过设置夹持装置,夹持装置工作时,夹持滑台在夹持滑座上发生位移,两夹持滑台均沿靠近承载装置的方向移动,之后夹板在夹持滑台上发生位移,使夹板的夹持位置位于包装袋的两边缘位置,夹板对包装袋的两边缘位置进行夹持固定,降低推板将料板推至包装袋内的过程中,包装袋发生位移的风险。
16.可选的,所述移运装置包括固定安装在所述安装支架上的移运支架、滑动安装在所述移运支架上的横向移运座、滑动安装在所述横向移运座上的竖向移运座、滑动安装在所述竖向移运座上的纵向移运座以及固定安装在所述纵向移运座上的移运吸盘和移运真空泵,所述移运吸盘与所述移运真空泵相连通;所述移运支架上转动安装有横向丝杠,所述移运支架上固定安装有横向电机,所述横向电机与所述横向丝杠传动连接,所述横向移运座与所述横向丝杠螺纹配合。
17.通过采用上述技术方案,通过设置移运装置,移运装置工作时,将横向移运座在移运支架上滑移,竖向移运座在横向移运座上滑移,纵向移运座在竖向移运座上滑移,实现对安装在纵向移运座上的移运吸盘在空间坐标系内位置的调整,便于根据包装袋堆叠架上待
取用的包装袋的位置进行移运吸盘的位置调整,移运吸盘对包装袋进行吸附,配合横向移运座、竖向移运座以及纵向移运座实现对包装袋从包装袋堆叠架到承载装置的移动转运。
18.可选的,所述转运装置包括滑动安装在所述移运支架上的横向转运座、滑动安装在所述横向转运座上的竖向转运座、固定安装在所述竖向转运座上的多个转运吸盘以及转运真空泵,所述转运真空泵与所述转运吸盘连通。
19.通过采用上述技术方案,通过设置转运装置,转运装置工作时,横向转运座在移运支架上横向滑移,竖向转运座在横向转运座上竖向滑移,使得转运吸盘置于包装袋的上方,之后转运真空泵工作驱动转运吸盘对包装袋进行吸附,之后竖向转运座和横向转运座再次滑移,将热封完成后的包装袋和料板转运至其他位置。
20.可选的,所述开口装置包括固定安装在所述安装支架上的下吸盘、固定安装在所述纵向移运座上的上吸盘、固定安装在所述纵向移运座上的第一真空泵以及固定安装在所述安装支架上的第二真空泵,所述第一真空泵的抽气口与所述上吸盘连通,所述第二真空泵的抽气口与所述下吸盘连通,所述下吸盘以及所述上吸盘的数量均设置为多个。
21.通过采用上述技术方案,通过设置开口装置,开口装置工作时,上吸盘在第一真空泵的作用下吸附在包装袋靠近开口端的上端面,下吸盘在第二真空泵的作用下吸附在包装袋靠近开口端的下端面,之后竖向移运座配合对纵向移运座进行提升,安装在纵向移运座上的上吸盘被一同提升,上吸盘对包装袋的上层膜进行提升,实现包装袋开口处打开。
22.可选的,所述热封装置包括热压支架、滑动安装在所述热压支架上的热压座、固定安装在所述热压座上的热压气缸、固定安装在所述热压气缸活塞杆端部的热压安装座以及安装在所述热压安装座上的微压组件。
23.通过采用上述技术方案,通过设置热封装置,热封装置工作时,热压座在热压支架上进行滑移,实现热压气缸、热压安装座以及微压组件的提升和下降,有利于避开输送装置出料口对料板的递送,降低热封装置对输送装置输送料板的干涉。
24.可选的,所述微压组件包括开设在所述热压安装座上的滑移孔、穿设在所述滑移孔内的滑移杆,固定安装在所述滑移杆端部的热压板、套设安装在所述滑移杆外部的弹簧以及固定安装在所述滑移杆端部的限位块,所述弹簧的一端抵紧在所述热压板上另一端抵紧在所述热压安装座上,所述限位块作用在所述热压座远离弹簧的端面上;所述滑移孔、所述滑移杆、所述弹簧以及所述限位块的数量至少设置为两个,且两滑移杆的端部固定连接在同一热压板上。
25.通过采用上述技术方案,通过设置微压组件,微压组件工作时,热压气缸驱动热压安装座下移,从而带动微压组件下移,热压板首先与包装袋接触,将包装袋压紧在安装支架上,之后热压气缸继续下移,热压板安装座和热压板配合将弹簧压缩,滑移杆在滑移孔内滑移,弹簧使得热压板具有一定的柔性位移空间,使得热压板在压紧包装袋封口处的作用力适中,降低热压板将包装袋压坏的风险,同时限位杆对热压板的运动路径起到导向限位的作用,提高热压板发生位移的稳定性,多个滑移杆在不同滑移孔内进行滑移,提高热压板在运动过程中的稳定性,降低热压板沿单根滑移杆的轴线发生转动的风险。
26.可选的,所述承载装置包括固定安装在所述安装支架上的承载支架,转动安装在所述承载支架上的多个承载辊、套设连接在两相邻所述承载辊之间的传动带以及与所述承载辊传动连接的承载驱动电机,所述承载驱动电机固定安装在所述承载支架上。
27.通过采用上述技术方案,承载装置工作时,承载驱动电机驱动与其传动连接的承载辊转动,承载辊通过传动带带动其余承载辊转动,多个承载辊共同作用对置于其上方的盛装有料板的包装袋沿其自身长度方向进行输送移动,实现对包装袋的位置调整,便于包装袋与热封装置和夹持装置进行配合。
28.可选的,所述承载装置上还设置有限位组件,所述限位组件包括固定安装在所述承载支架上的限位滑座,滑动安装在所述限位滑座上的至少两个限位滑台以及固定安装在任一所述限位滑台上的多个限位杆,限位杆穿插在两相邻所述承载辊之间,且其端部高于所述承载辊的承载平面。
29.通过采用上述技术方案,通过设置限位组件,限位组件工作时,限位滑台在限位滑座上发生位移,实现沿平行承载辊轴线方向的运动,两限位滑台带动安装在其自身上方的限位杆向相互靠近的方向移动,对置于承载辊上方的包装袋进行夹持限位,提高包装袋置于承载装置上的稳定性,同时使得包装袋置于承载装置的中心位置,便于后期真空密封过程中,其余设备和包装袋的定位配合,提高其余工序的执行效果。
30.综上所述,本技术包括以下至少一种有益技术效果:1.通过设置输送装置、包装袋堆叠架、承载装置、移运装置、开口装置、真空装置、热封装置以及转运装置,真空包装机工作时,移运装置将包装袋堆叠架上堆叠的包装袋移运至承载装置上,承载装置对包装袋进行承载,并对包装袋进行初始的固定,之后开口装置对包装袋的开口端打开,承载装置、移运装置相互配合对包装袋的外壁进行抽拉,使得包装袋的内腔打开,输送装置将料板输送至承载装置上,料板沿包装袋的开口端进入包装袋内,真空装置对包装袋内的空气进行抽吸,待包装袋内达到要求的真空度之后真空装置从包装袋内抽离,热封装置对包装袋的开口端进行热封,最后转运装置将热封完成后的包装袋进行转运,实现真空热封后料板的转运;上述装置相互配合,共同完成料板上包装袋的密封,实现了包装袋对料板的全自动真空密封,无需人工进行辅助真空密封操作,提高了真空热封装置的自动化程度;2.通过设置真空装置、真空装置工作时,第一滑台沿靠近包装袋的方向在第一滑座上发生位移,使得抽气管伸入包装袋的内腔内,之后驱动真空泵工作,对包装袋内的空气进行抽吸,使得包装袋内呈真空状态,以此实现包装袋内的抽真空;3.通过设置推压装置,推压装置工作时,第二滑台沿靠近包装袋的方向在第二滑座上发生位移,使得推板作用在料板上,并将料板推入至包装袋袋底,之后第二滑台沿远离包装袋的方向在第二滑座上发生位移,其自身恢复至初始位置等待下一料板的递推。输送装置将料板移运至承载装置上的过程中,料板由于其自身惯性不足的原因,料斗本身可能无法完全穿过包装袋的开口进入包装袋内,导致后期包装袋无法进行封装,推板将料板推入包装袋内,有效改善了这一问题。
附图说明
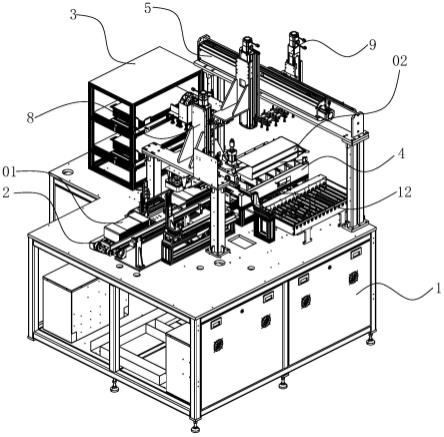
31.图1是本技术实施例的整体结构示意图。
32.图2是本技术实施例为展示移运装置的结构示意图。
33.图3是本技术实施例为展示承载装置的结构示意图。
34.图4是本技术实施例为展示真空装置的结构示意图。
35.图5是本技术实施例为展示热压装置的结构示意图。
36.图6是图5中a结构的局部放大示意图。
37.附图标记说明:1、安装支架;2、输送装置;3、包装袋堆叠架;4、承载装置;41、承载支架;42、承载辊;43、传动带;44、载驱动电机;45、限位组件;451、限位滑座;452、限位滑台;453、限位杆;5、移运装置;51、移运支架;52、横向移运座;53、竖向移运座;54、纵向移运座;55、移运吸盘;56、移运真空泵;6、开口装置;61、下吸盘;62、上吸盘;63、第一真空泵;64、第二真空泵;7、真空装置;71、第一滑座;72、第一滑台;73、抽气管;74、真空泵;8、热封装置;81、热压支架;82、热压座;83、热压气缸;84、热压安装座;85、微压组件;851、滑移孔;852、滑移杆;853、热压板;854、弹簧;855、限位块;9、转运装置;91、横向转运座;92、竖向转运座;93、转运吸盘;94、转运真空泵;10、推压装置;101、第二滑座;102、第二滑台;103、推板;11、避让槽;12、夹持装置;121、夹持滑座;122、夹持滑台;123、夹板;01、料板;02、包装袋。
具体实施方式
38.以下结合附图1-6对本技术作进一步详细说明。
39.本技术实施例公开一种自动真空包装机。
40.参照图1和图2,一种自动真空包装机包括安装支架1、通过螺栓固定安装在安装支架1上的输送装置2、通过螺栓固定安装在安装支架1上的包装袋堆叠架3、通过螺栓固定安装在安装支架1上的移运装置5、通过螺栓固定安装在安装支架1上的承载装置4、通过螺栓固定安装在安装支架1上的夹持装置12、通过螺栓固定安装在安装支架1上的开口装置6、通过螺栓固定安装在安装支架1上的推压装置10、通过螺栓固定安装在安装支架1上的真空装置7以及通过螺栓固定安装在安装支架1上的热封装置8。
41.真空包装机工作时,首先移运装置5将包装袋堆叠架3上堆叠的包装袋02移运至承载装置4上,承载装置4对置于其上方的包装袋02做位置调整。之后开口装置6将包装袋02的开口端打开并进行开口,此过程中承载装置4、移运装置5相互配合对包装袋02的外壁进行抽拉,使得包装袋02的内腔打开。然后夹持装置12对开口后包装袋02的两外缘位置进行固定,输送装置2将盛装有芯片的料板01沿包装袋02的开口端递送至包装袋02内,实现包装袋02对料板01的套设。之后推压装置10进一步对料板01进行推送,使得料板01送入包装袋02的袋底位置,之后真空装置7伸入包装袋02内对包装袋02内的空气进行抽吸,待包装袋02内达到要求的真空度之后真空装置7从包装袋02内抽离,热封装置8对包装袋02的开口端进行热封,实现料板01的真空热封包装,最后转运装置9将热封完成后的包装袋02进行转运。上述装置相互配合共同完成包装袋02对料板01的真空热封包装,无需人工辅助即可完成料板01包装的全流程作业,改善了真空热封装置8自动化程度低的问题。
42.包装袋堆叠架3包括通过螺栓安装在安装支架1上的堆叠架主体、通过螺栓安装在堆叠架主体上的包装袋02承载板以及通过螺栓安装在包装袋02承载板上的多个包装袋02限位板,本技术实施例中,包装袋02承载板的数量设置为2个,包装袋02限位板的数量设置为8个,且4个为一组,分别设置在包装袋02限位板承载端面的周向位置。
43.参照图1和图2,移运装置5包括通过螺栓固定安装在安装支架1上的移运支架51、滑动安装在移运支架51上的横向移运座52,移运支架51上通过螺栓固定安装有横向电机,横向电机为可以正反转的伺服电机,横向电机的输出轴端部通过联轴器传动连接有横向丝
杠,横向丝杠转动安装在移运支架51上,横向移运座52与横向丝杠螺纹配合,且横向移运座52的两端面贴合在移运支架51上。
44.横向电机驱动横向丝杠转动,横向丝杠通过与横向移运座52的螺纹配合以及移运支架51的限位作用,将其自身的转动,转变为横向移运座52在移运支架51上的移动,实现横向移运座52在移动支架上的移动调整。
45.移运装置5还包括滑动安装在横向移运座52上的竖向移运座53、滑动安装在竖向移运座53上的纵向移运座54以及固定安装在纵向移运座54上的移运吸盘55,本技术实施例中,竖向移运座53以及纵向移运座54的驱动方式与横向移运座52的驱动方式相同,均为电机丝杠驱动,在此不做额外赘述。本技术实施例中移运吸盘55的数量设置为两个。
46.移运装置5工作时,横向移运座52在移运支架51上滑移,竖向移运座53在横向移运座52上滑移,纵向移运座54在竖向移运座53上滑移,三者滑移方向两两相互垂直设置,实现对安装在纵向移运座54上的移运吸盘55在空间坐标系内位置的调整,将移运吸盘55置于包装袋堆叠架3上待取用的包装袋02的上方,然后驱动移运吸盘55对包装袋02进行吸附固定,之后驱动横向移运座52、纵向移运座54以及竖向移运座53发生位移,将包装袋02转运至承载装置4的上方,实现对包装袋02的转运。
47.参照图2和图3,承载装置4包括通过螺栓固定安装在安装支架1上的承载支架41、转动安装在承载支架41上的多个承载辊42、固定安装在承载支架41上的承载驱动电机44、套设连接在两相邻承载辊42之间的传动带43、固定安装在承载支架41上的承载吸盘以及限位组件45。本技术实施例中,承载组件的数量设置为7个,则传动带43的数量设置为6个。
48.参照图2和图3,限位组件45包括通过螺栓固定安装在安装支架1上的限位滑座451、滑动安装在限位滑座451上的至少两个限位滑台452以及插接安装在限位滑台452上的多个限位杆453,本技术实施例中,限位滑座451上限位滑台452的数量设置为两个,且两限位滑台452在限位滑座451上的运动轨迹沿平行于承载辊42轴线的方向,任一限位滑台452上限位杆453的数量设置为7个,且7根限位杆453穿插设置在承载辊42之间,限位杆453远离限位滑台452的端部从承载辊42的承载平面穿出。
49.包装袋02被转运至承载辊42上方之后,限位滑台452在限位滑座451上发生位移,两限位滑台452带动限位杆453向相互靠近的方向移动,对置于承载辊42上方的包装袋02进行夹持限位,之后承载驱动电机44驱动与其直接连接的承载辊42转动,该承载辊42通过传动带43带动其余承载辊42转动,纵向对包装袋02在承载装置4上的位置进行调整,便于其与开口装置6的配合;此过程中限位组件45始终对包装袋02进行夹持限位,提高包装袋02置于承载装置4上的稳定性,同时使得包装袋02置于承载装置4的中心位置。
50.参照图2和图3,开口装置6包括卡接安装在安装支架1上的下吸盘61、卡接安装在纵向移运座54上的上吸盘62、通过螺栓固定安装在纵向移运座54上的第一真空泵63以及通过螺栓固定安装在横向移运座52上的第二真空泵64,上吸盘62和下吸盘61的数量均设置为多个,本技术实施例中上吸盘62的数量设置为6个,下吸盘61的数量设置为5个。第一真空泵63的抽气口通过橡胶软管与多个上吸盘62连通,第二真空泵64的抽气口通过橡胶软管与多个下吸盘61相连通。
51.开口装置6工作时,移运装置5对上吸盘62进行位置调整,使其置于包装袋02的正上方,然后第一真空泵63和第二真空泵64工作,分别对上吸盘62和下吸盘61进行作用,使得
上吸盘62和下吸盘61吸附在包装袋02的外表面,之后竖向移运座53配合对纵向移运座54进行提升,安装在纵向移运座54上的上吸盘62被一同提升,上吸盘62对包装袋02的上层膜进行提升,实现包装袋02开口处的打开和开口。同时承载装置4的承载吸盘以及移运装置5的移运吸盘55对包装袋02的外壁进行吸附,使得包装袋02的腔室打开更加彻底。
52.参照图2和图3,夹持装置12的数量设置为两个,且两夹持装置12分别通过螺栓固定安装在承载装置4的两侧,任一夹持装置12包括通过螺栓固定安装在安装支架1上的夹持滑座121、滑动安装在夹持滑座121上的夹持滑台122以及滑动安装在夹持滑台122上的夹板123,任一夹持滑台122上夹板123的数量设置为2个,两不同夹持装置12的夹板123相对设置,且该两夹板123为一组沿竖向在夹持滑台122上进行滑移,夹持滑台122在夹持滑座121上的运动方向沿横向设置,即平行于承载辊42的轴线方向,做靠近或者远离承载装置4的方向。
53.待包装袋02开口之后,夹持滑台122在夹持滑座121上沿靠近承载装置4的方向移动,之后夹板123在夹持滑台122上发生位移,并对包装袋02的两边缘位置进行夹持固定,夹持装置12对包装袋02进行固定,降低包装袋02发生位移的风险。
54.输送装置2包括固定安装在安装支架1上的输送支架、转动安装在输送支架上的输送辊、套设连接在输送辊上的输送带以及通过螺栓固定安装在输送带上的输送电机,输送电机通过联轴器驱动其一输送辊转动。
55.输送装置2工作时,输送电机驱动输送辊转动,输送辊带动输送带移动,输送带对置于其上方的料板01进行转运,使其转运至承载装置4上方,料板01在其自身的惯性作用下,沿包装袋02的开口进入包装袋02内。输送装置2实现了料板01的远程输送。
56.参照图4,推压装置10包括通过螺栓固定安装在安装支架1上的第二滑座101、滑动安装在第二滑座101上的第二滑台以及通过螺钉固定安装在第二滑台端部的推板103。推压装置10置于输送装置2的正上方,且第二滑台在第二滑座101上的滑动方向与输送装置2的输送方向相同。
57.待料板01沿包装袋02的开口进入包装袋02内之后,第二滑台第二滑座101上发生位移,使得推板103将料板01推入至包装袋02袋底,之后第二滑台沿远离包装袋02的方向在第二滑座101上发生位移,其自身恢复至初始位置等待下一料板01的递推。推压装置10将料板01推送至包装袋02的底部,便于包装袋02后期的封口处理。
58.参照图4,真空装置7包括通过螺栓固定安装在安装支架1上的第一滑座71、滑动安装在第一滑座71上的第二滑台、通过压条和螺钉固定安装在第一滑台72上的抽气管73以及通过螺栓固定安装在安装支架1上的真空泵74,真空泵74抽气口通过橡胶软管与抽气管73的端部连通,抽气管73为端部为扁嘴状的金属管。推板103上开设有避让槽11,抽气管73置于避让槽11处。
59.待料板01完全置于包装袋02内之后,第一滑台72沿靠近包装袋02的方向在第一滑座71上发生位移,使得抽气管73伸入包装袋02的内腔内,之后驱动真空泵74工作,对包装袋02内的空气进行抽吸,使得包装袋02内呈真空状态,以此实现包装袋02内的抽真空。
60.参照图5和图6,热封装置8包括通过螺栓固定安装在安装支架1上的热压支架81、滑动安装在热压支架81上的热压座82固定安装在热压座82上的热压气缸83、通过螺栓固定安装在热压气缸83活塞杆端部的热压安装座84以及安装在热压安装座84上的微压组件85。
热压气缸83的数量设置为两个,且分别位于热压座82靠近其自身两端面的位置,两热压座82连接在同一热压安装座84上。
61.微压组件85包括开设在热压安装座84上的滑移孔851、穿设在滑移孔851内的滑移杆852、套设在滑移杆852上的弹簧854、卡接安装在滑移杆852端部的限位块855、固定安装在滑移杆852端部的热压板853,滑移孔851的数量至少设置为两个,本技术实施例中滑移孔851的数量设置为2个,与其对应的滑移杆852、弹簧854以及限位块855的数量均设置为2个,且一一对应设置,两滑移杆852端部连接在同一热压板853上。弹簧854的一端抵紧在热压板853上,另一端抵紧在热压安装座84上,在弹簧854自身的弹力作用下,限位块855抵紧在热压安装座84远离弹簧854的端面上。
62.真空装置7将包装袋02内的空气抽出之后,热压座82在热压支架81上进行滑移,热压气缸83、热压安装座84以及微压组件85向包装袋02方向的滑移,之后热压气缸83驱动热压安装座84下移,从而带动微压组件85下移,热压板853首先与包装袋02接触,将包装袋02压紧在安装支架1上,实现对包装袋02的热封。之后热压气缸83继续推动热压安装座84下移,热压安装座84和热压板853配合将弹簧854压缩,滑移杆852在滑移孔851内滑移,弹簧854使得热压板853具有一定的柔性位移空间,使得热压板853在压紧包装袋02封口处的作用力适中,降低热压板853将包装袋02压坏的风险。多个滑移杆852在不同滑移孔851内进行滑移,对热压板853的运动路径起到导向限位的作用,提高热压板853在运动过程中的稳定性,降低热压板853沿单根滑移杆852的轴线发生转动的风险。
63.参照图2和图3,转运装置9包括滑动安装在移运支架51上的横向转运座91、滑动安装在横向转运座91上的竖向转运座92、卡接安装在竖向转运座92上的多个转运吸盘93以及通过螺栓固定安装在竖向转运座92上的转运真空泵94,本技术实施例中,转运吸盘93的数量设置为12个,且以3*4的阵列卡接安装在竖向转运座92上,转运真空泵94通过橡胶软管与多个转运吸盘93连通。
64.套设有包装袋02的料板01真空热封完成之后,横向转运座91在移运支架51上横向滑移,竖向转运座92在横向转运座91上竖向滑移,使得转运吸盘93置于包装袋02的上方,之后转运真空泵94工作驱动转运吸盘93对包装袋02进行吸附,之后竖向转运座92和横向转运座91再次滑移,将料板01和包装袋02转运至其他位置,实现包装袋02和料板01的转运。
65.本技术实施例一种自动真空包装机的实施原理为:真空包装机工作时,首先移运装置5将包装袋堆叠架3上堆叠的包装袋02移运至承载装置4上,承载装置4对置于其上方的包装袋02做位置调整。之后开口装置6将包装袋02的开口端打开并进行开口,此过程中承载装置4、移运装置5相互配合对包装袋02的外壁进行抽拉,使得包装袋02的内腔打开。然后夹持装置12对开口后包装袋02的两外缘位置进行固定,输送装置2将盛装有芯片的料板01沿包装袋02的开口端递送至包装袋02内,实现包装袋02对料板01的套设。之后推压装置10进一步对料板01进行推送,使得料板01送入包装袋02的袋底位置,之后真空装置7伸入包装袋02内对包装袋02内的空气进行抽吸,待包装袋02内达到要求的真空度之后真空装置7从包装袋02内抽离,最后热封装置8对包装袋02的开口端进行热封,实现料板01的真空热封包装。上述装置相互配合共同完成包装袋02对料板01的真空热封包装,无需人工辅助即可完成料板01包装的全流程作业,改善了真空热封装置8自动化程度低的问题。
66.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术
的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1