一种螺旋型自动扶梯运行稳定装置的制作方法
1.本发明涉及自动扶梯技术领域,尤其涉及一种螺旋型自动扶梯运行稳定装置。
背景技术:
2.螺旋形电动扶梯是倾斜运送乘客,且带有循环运行阶梯的一种电动扶梯,不仅可以节省空间,还具有艺术效果,其螺旋形的设计可以帮助乘客在乘坐时减少对高度的恐惧,亦可以灵活的适配建筑。
3.螺旋形电动扶梯在运行的过程中,沿着螺旋形的导轨上升,存在三个方向的运动,为保证螺旋形自动扶梯的正常运行,螺旋形自动扶梯梯级的内外圈速度不同,内外圈侧梯级驱动链条的间距也不同,造成螺旋形自动扶梯的梯级在螺旋处位移时,梯级跳起和陷落的发生率高于常规直行的电动扶梯。
4.公开号为cn112777465a的一种螺旋式自动扶梯用的梯级结构,梯级本体包括固定在支撑架上的踢面和踏面;踏面为扇形结构,踏面由从踏面内圈至踏面外圈依次排列的一组圆心相同且圆弧半径不同的踏面齿组成,踢面由从踢面内圈至踢面外圈依次排列的一组沿竖直方向设置的踢面齿组成,踢面齿与踏面齿交错对应啮合;上述专利虽然实现了防止梯级跳起的功能,但无法防止梯级陷落,对乘客的足部、下肢甚至整个身体进行保护。
技术实现要素:
5.本发明提供了一种螺旋型自动扶梯运行稳定装置,旨在解决现有装置无法防止梯级陷落,对乘客的足部、下肢甚至整个身体进行保护的技术问题。
6.本发明的技术实施方案为:一种螺旋型自动扶梯运行稳定装置,包括有梯级导轨,梯级导轨上设置有若干个梯级件,梯级件设置有两个梯级固定架,两个梯级固定架之间转动设置有第一转杆,若干个第一转杆通过链轮和扶梯驱动装置连接,第一转杆的两端均设置有转动轮,两个梯级固定架均螺纹连接有第二转杆,两个第二转杆的相背端均转动设置有矩形滑动件,两个矩形滑动件均设置有转动轮和导向轮,扶梯驱动装置通过链轮传动若干个梯级件沿梯级导轨运行,相邻的两个梯级固定架相背侧均设置有两个防跳架,四个防跳架沿梯级导轨跟随相邻的梯级件运行,并对相邻的梯级件在运行过程中的跳起或陷落进行限位。
7.进一步的是,梯级跳动缓冲机构包括有防跳滑动件,防跳滑动件设置有若干个,若干个防跳滑动件分别滑动设置于相邻防跳架的上下两端,防跳滑动件和梯级导轨接触的一端设置为转动轮,防跳滑动件和防跳架之间设置有第一弹簧。
8.进一步的是,防梯级逆行机构包括有第三转杆,第三转杆设置有若干个,若干个第三转杆分别螺纹连接于相邻的梯级固定架,相邻的两个第三转杆之间花键设置有第四转杆,第四转杆和相邻的第一转杆之间通过皮带轮和皮带传动,相邻的两个梯级固定架相背侧均设置有n型固定架,每个n型固定架上均滑动设置有圆形板,相邻的两个圆形板相背侧均设置有第一减速件,n型固定架设置有用于对逆行的梯级件进行减速的防梯级逆行组件。
9.进一步的是,相邻的两个第一减速件相背侧的摩擦系数大于使梯级件减速的摩擦系数。
10.进一步的是,防梯级逆行组件包括有第二减速件,第二减速件设置有若干个,若干个第二减速件分别转动设置于相邻的n型固定架上,每个n型固定架均转动设置有第三减速件,每个第三减速件均与相邻的第二减速件转动连接,相邻的两个圆形板相背侧均设置有限位件。
11.进一步的是,第二减速件和第三减速件均设置有倾斜面,限位件设置有倾斜面,第二减速件和第三减速件的倾斜面分别与相邻限位件的倾斜面挤压配合,用于防止梯级件逆行。
12.进一步的是,每个第二减速件和第三减速件的两端均设置为不规则的平面,用于防止梯级件逆行。
13.进一步的是,防梯级偏移机构包括有探位件,探位件设置有若干个,若干个探位件分别滑动设置于相邻的梯级固定架上,梯级固定架和相邻的探位件之间设置有第二弹簧,相邻的两个探位件相向侧均设置有第一齿板,相邻的两个第一齿板交错设置,每个梯级件均设置有两个蜗杆,每个蜗杆均设置有第一齿轮,相邻的两个第一齿轮分别与相反方向的第一齿板啮合,第二转杆上设置有蜗轮,蜗轮和相邻的蜗杆啮合,梯级件上设置有用于保护行人的梯级偏移保护组件。
14.进一步的是,相邻的两个探位件相背侧均设置有转动轮,防止探位件与梯级导轨摩擦,缩短探位件的长度。
15.进一步的是,梯级偏移保护组件包括有第五转杆,第五转杆设置有若干个,若干个第五转杆分别转动设置于相邻的梯级件上,第五转杆和相邻的蜗杆之间通过皮带轮和皮带传动,相邻的两个第一齿板中一个设置有第二齿板,第五转杆上设置有第二齿轮,第二齿轮和第二齿板啮合,第五转杆上设置有第一锥齿轮,梯级件设置有支撑固定架,支撑固定架转动设置有第六转杆,第六转杆和第四转杆之间通过皮带轮和皮带传动,第六转杆设置有第二锥齿轮,第二锥齿轮和相邻的第一锥齿轮啮合。
16.本领域技术人员能够理解的是,本发明至少具有如下有益效果:本发明利用梯级件带动相邻的四个防跳架沿梯级导轨运行,保证梯级件在运行过程中,其相邻的四个防跳架始终被梯级导轨所限位,防止梯级件在运行的过程中跳起或陷落,保证扶梯运行平稳;通过跳动缓冲机构,利用第一弹簧减缓防跳架的移动趋势,并对移动复位的防跳架进行缓冲,避免对梯级件上的行人造成伤害;通过防梯级逆行机构,利用第一转杆传动第一减速件移动至抵触梯级导轨,对逆行的梯级件进行减速,利用圆形板带动其上的限位件移动挤压第二减速件和第三减速件,传动第二减速件和第三减速件由交叉十字型逐渐向一字型靠拢,并对梯级导轨进行挤压,减缓梯级件逆行的趋势,避免梯级件逆行对其上的行人造成伤害;通过防梯级偏移机构,利用偏移方向的探位件传动相反方向的矩形滑动件和其上的部件向远离偏移方向移动,避免梯级件发生偏移后,梯级件陷落,威胁到行人生命安全。
附图说明
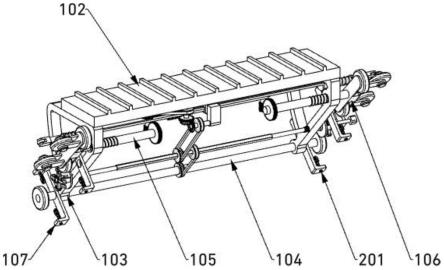
17.图1为本发明的立体结构示意图。
18.图2为本发明的防跳架立体结构示意图。
19.图3为本发明梯级跳动缓冲机构的立体结构示意图。
20.图4为本发明梯级跳动缓冲机构的第一弹簧立体结构示意图。
21.图5为本发明防梯级逆行机构的立体结构示意图。
22.图6为本发明防梯级逆行机构的第三减速件立体结构示意图。
23.图7为本发明防梯级逆行机构的限位件立体结构示意图。
24.图8为本发明防梯级偏移机构的立体结构示意图。
25.图9为本发明防梯级偏移机构的蜗轮立体结构示意图。
26.图10为本发明防梯级偏移机构的第二齿轮立体结构示意图。
27.图11为本发明防梯级偏移机构的第二锥齿轮立体结构示意图。
28.附图标记中:101-梯级导轨,102-梯级件,103-梯级固定架,104-第一转杆,105-第二转杆,106-矩形滑动件,107-防跳架,201-防跳滑动件,202-第一弹簧,301-第三转杆,302-第四转杆,303-n型固定架,304-圆形板,305-第一减速件,306-第二减速件,307-第三减速件,308-限位件,401-探位件,402-第二弹簧,403-第一齿板,404-蜗杆,405-第一齿轮,406-蜗轮,407-第五转杆,408-第二齿板,409-第二齿轮,410-第一锥齿轮,411-支撑固定架,412-第六转杆,413-第二锥齿轮。
具体实施方式
29.这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,否则不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本技术相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本技术的一些方面相一致的装置的例子。
30.实施例1
31.一种螺旋型自动扶梯运行稳定装置,如图1-图11所示,包括有梯级导轨101,梯级导轨101上设置有若干个方便行人踩踏的梯级件102,梯级件102固接有两个梯级固定架103,两个梯级固定架103之间转动连接有第一转杆104,若干个第一转杆104通过链轮和扶梯驱动装置连接,第一转杆104的两端均设置有用于梯级件102运输行人的转动轮,两个梯级固定架103均螺纹连接有第二转杆105,两个第二转杆105的相背端均转动连接有矩形滑动件106,矩形滑动件106位于梯级导轨101内,两个矩形滑动件106均设置有用于梯级件102运输行人的转动轮和导向轮,扶梯驱动装置通过链轮传动若干个梯级件102沿梯级导轨101运行,相邻的两个梯级固定架103相背侧均固接有两个防跳架107,四个防跳架107沿梯级导轨101跟随相邻的梯级件102运行,并对相邻的梯级件102在运行过程中进行限位,防止梯级件102跳动及陷落错位。
32.扶梯驱动装置通过链轮传动若干个梯级件102沿梯级导轨101运行,在电梯的运行过程中,梯级件102带动相邻的四个防跳架107沿梯级导轨101运行,四个防跳架107和梯级导轨101配合,防止梯级件102跳动及陷落错位,保证梯级件102上行人的生命安全。
33.实施例2
34.在实施例1的基础之上,如图3和图4所示,梯级跳动缓冲机构包括有防跳滑动件201,防跳滑动件201设置有若干个,若干个防跳滑动件201分别滑动连接于相邻防跳架107的上下两端,防跳滑动件201和梯级导轨101接触的一端设置为转动轮,减小梯级件102运行
时的摩擦力,防跳滑动件201和防跳架107之间固接有用于缓冲的第一弹簧202,通过第一弹簧202,对跳起或陷落的梯级件102施加反方向的作用力,并对复位的梯级件102进行缓冲,避免梯级件102跳起或陷落的错位幅度过大。
35.当梯级件102跳动错位时,防跳架107带动两个防跳滑动件201向上移动,在此过程中,下侧的防跳滑动件201在梯级导轨101的限位作用下不向上移动,防跳架107向上移动挤压第一弹簧202,第一弹簧202受到挤压对向上移动的防跳架107产生反向的作用力,减缓防跳架107的向上移动趋势,当防跳架107移动复位时,在上侧的防跳滑动件201和第一弹簧202的作用下,对移动复位的防跳架107进行缓冲。
36.当梯级件102陷落错位时,防跳架107带动两个防跳滑动件201向下移动,在此过程中,上侧的防跳滑动件201在梯级导轨101的限位作用下不向下移动,防跳架107向下移动挤压第一弹簧202,第一弹簧202受到挤压对向下移动的防跳架107产生反向的作用力,减缓防跳架107的向下移动趋势,当防跳架107移动复位时,在下侧的防跳滑动件201和第一弹簧202的作用下,对移动复位的防跳架107进行缓冲。
37.实施例3
38.在实施例2的基础之上,如图5-图7所示,防梯级逆行机构包括有第三转杆301,第三转杆301设置有若干个,若干个第三转杆301分别螺纹连接于相邻的梯级固定架103,相邻的两个第三转杆301之间花键设置有第四转杆302,第四转杆302和相邻的第一转杆104之间通过皮带轮和皮带传动,且第四转杆302上的皮带轮为单向皮带轮,相邻的两个梯级固定架103相背侧均设置有n型固定架303,每个n型固定架303上均滑动设置有圆形板304,相邻的两个圆形板304相背侧均设置有第一减速件305,左右相邻的两个第一减速件305相背侧的摩擦系数大于使梯级件102减速的摩擦系数,用于对梯级件102进行减速,通过第一转杆104传动第一减速件305移动至抵触梯级导轨101,对逆行的梯级件102进行减速,n型固定架303设置有用于对逆行的梯级件102进行减速的防梯级逆行组件。
39.如图5-图7所示,防梯级逆行组件包括有第二减速件306,第二减速件306设置有若干个,若干个第二减速件306分别转动连接于相邻的n型固定架303上,每个n型固定架303均转动连接有第三减速件307,每个第三减速件307均与相邻的第二减速件306转动连接,每个第二减速件306和第三减速件307的两端均设置为不规则的平面,用于防止梯级件102逆行,相邻的两个圆形板304相背侧均固接有四个限位件308,第二减速件306和第三减速件307均设置有倾斜面,限位件308设置有倾斜面,第二减速件306和第三减速件307的倾斜面分别与相邻限位件308的倾斜面挤压配合,用于防止梯级件102逆行,圆形板304带动其上的限位件308移动挤压第二减速件306和第三减速件307,传动第二减速件306和第三减速件307由交叉十字型逐渐向一字型靠拢,并对梯级导轨101进行挤压,减缓梯级件102逆行的趋势。
40.当梯级件102在上升的过程中突然逆行时,第一转杆104通过皮带轮和皮带传动第四转杆302反向转动,第四转杆302反向转动带动相邻的两个第三转杆301移动,两个第三转杆301分别向相背侧的方向移动,第三转杆301通过圆形板304带动第一减速件305移动,直至第一减速件305移动至抵触梯级导轨101,对逆行的梯级件102进行减速,减缓梯级件102逆行的趋势,避免梯级件102逆行对其上的行人造成伤害。
41.在上述过程中,圆形板304带动其上的限位件308移动挤压第二减速件306和第三减速件307,第二减速件306和第三减速件307受到挤压后,向垂直于梯级导轨101的方向交
叉移动,在此过程中,第二减速件306和第三减速件307由交叉十字型逐渐向一字型靠拢,并对梯级导轨101进行挤压,对逆行的梯级件102进行减速,减缓梯级件102逆行的趋势,避免梯级件102逆行对其上的行人造成伤害,直至梯级件102不再逆行。
42.当梯级件102不再逆行后,交叉并向一字型靠拢的第二减速件306和第三减速件307与抵触梯级导轨101的第一减速件305固定不动,避免梯级件102逆行。
43.实施例4
44.在实施例3的基础之上,如图8-图11所示,防梯级偏移机构包括有探位件401,探位件401设置有若干个,若干个探位件401分别滑动连接于相邻的梯级固定架103上,相邻的两个探位件401相背侧均设置有转动轮,防止探位件401与梯级导轨101摩擦,缩短探位件401的长度,梯级固定架103和相邻的探位件401之间固接有第二弹簧402,相邻的两个探位件401相向侧均固接有第一齿板403,相邻的两个第一齿板403交错设置,每个梯级件102均转动连接有两个蜗杆404,每个蜗杆404均键连接有第一齿轮405,相邻的两个第一齿轮405分别与相反方向的第一齿板403啮合,第二转杆105上固接有蜗轮406,蜗轮406和相邻的蜗杆404啮合,通过偏移方向的探位件401受到挤压后移动,传动相反方向的矩形滑动件106和其上的部件向远离偏移方向移动,避免梯级件102发生偏移后,梯级件102陷落,威胁到行人生命安全,梯级件102上设置有用于保护行人的梯级偏移保护组件。
45.如图8-图11所示,梯级偏移保护组件包括有第五转杆407,第五转杆407设置有若干个,若干个第五转杆407分别转动连接于相邻的梯级件102上,第五转杆407和左侧相邻的蜗杆404之间通过皮带轮和皮带传动,且左侧蜗杆404上的皮带轮为单向皮带轮,左侧的第一齿板403固接有第二齿板408,第五转杆407上键连接有第二齿轮409,第二齿轮409和第二齿板408啮合,第五转杆407上键连接有第一锥齿轮410,梯级件102固接有支撑固定架411,支撑固定架411转动连接有第六转杆412,第六转杆412和第四转杆302之间通过皮带轮和皮带传动,且第六转杆412上的皮带轮为单向皮带轮,第六转杆412键连接有第二锥齿轮413,第二锥齿轮413和相邻的第一锥齿轮410啮合,通过探位件401传动第四转杆302转动,避免梯级件102偏移后仍处于运行状态,保护梯级件102上行人的生命安全。
46.当某个梯级件102偏移时,偏移方向的探位件401受到挤压后移动,并挤压相邻的第二弹簧402,第二弹簧402受到挤压后产生反向的作用力,探位件401带动相邻的第一齿板403移动,第一齿板403通过其反方向的第一齿轮405传动蜗杆404转动,蜗杆404通过蜗轮406传动,相反于偏移方向的第二转杆105转动,第二转杆105通过相邻的梯级固定架103,带动矩形滑动件106和其上的部件向远离偏移方向移动,避免梯级件102发生偏移后,梯级件102陷落,威胁到行人生命安全。
47.当梯级件102向左偏移时,左侧的探位件401受到挤压,并重复上述步骤,且左侧的第一齿板403带动第二齿板408向右移动,第二齿板408通过第二齿轮409、第五转杆407、第一锥齿轮410、第二锥齿轮413和第六转杆412传动第四转杆302转动,重复上述步骤,避免梯级件102偏移后仍处于运行状态,保护梯级件102上行人的生命安全。
48.当梯级件102向右偏移时,右侧的探位件401受到挤压,并重复上述步骤,且在此过程中,左侧的蜗杆404通过皮带轮和皮带传动第五转杆407转动,重复上述步骤,避免梯级件102偏移后仍处于运行状态,保护梯级件102上行人的生命安全。
49.以上所述仅是本发明的优选实施方式,并不用以限制本技术,凡在本技术的精神
和原则之内,所做的任何修改、等同替换、改进等,均应包含在本技术保护的范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1