一种可自动存取档案的档案架、档案自动存取机器人及档案自动存取方法与流程
1.本发明涉及档案智能管理技术领域,特别是涉及一种种可自动存取档案的档案架、档案自动存取机器人及档案自动存取方法。
背景技术:
2.档案盒是各个机关和单位档案管理部门整理和装订储存文件的装具。通常是由纸板和牛皮纸裱糊制作的,基本都用无酸纸制作。由于无酸纸采用国际上先进的akd中性施胶工艺,无酸腐蚀,使档案可以长期保存,不变质、不褪色,具有防虫、防霉等特点,对装订在盒子内的档案文件没有腐蚀破坏,使用方便,全国都在逐步无酸纸档案盒替换掉过去老式笨重的纸板档案盒。市场上也有塑料材质的档案盒,主要用于日常办公场所的文件保存和档案管理,主要形式为单面翻开式结构,将背脊一侧的翻合面打开,使档案盒的内部处于敞开状态,完成文档的存取过程后,再次将翻合面盖上,翻合面通过魔术贴或磁片或按扣与档案盒的固定侧壁连接。通常在背脊处设置通孔,以便于档案盒的抽出。
3.为解决上述问题,笔者设计了一款使用方便的档案盒(专利号:zl 202220164397.8,授权公告号:cn 217170312u),采用密封结构,使档案盒具备良好的密封性,能够很好的防尘、防水,通过在盒体侧面设置磁条,可使毗邻的档案盒彼此吸附,并在盒体底部设置磁块,使盒体可吸附在档案架上,从而增强档案盒单体及整体放置状态的稳定性,在盒体上设置兼具照明功能的辅助装置,便于盒体的拿取操作和信息读取,提高了档案盒的使用便利性。然而,其仍然是采用人工管理的方式,实现档案盒的借阅操作和归还操作,虽然在档案盒的背脊黏贴档案信息,以便查阅时的查找,而档案数量较多时,快速、准确地找到所需查阅的档案也不容易;进入档案室的人员都有可能调阅档案,尤其档案管理人员可以自由翻阅档案,且可能存在借阅记录填写不规范或漏填的情况,则会造成档案的保密性不高。同时,在档案借阅过程中,非专业的操作容易对档案袋或档案盒造成损伤,尤其在重新放回时,借阅人员容易随意放置,给后期的档案管理和查阅造成不便,若通过管理员集中进行分类和放回档案架,则会加大管理员的劳动强度。
技术实现要素:
4.本发明所要解决的技术问题是提供一种可自动存取档案的档案架、档案自动存取机器人及档案自动存取方法,通过在档案架上设置可垂向和水平方向移动定位的抓取机械手机构,完成借阅阶段档案盒在档案架上的自动选取、转移和送出,以及归还阶段档案盒在档案架上的自动定位和放置,通过设置配套的档案自动存取机器人,完成档案盒在档案柜与借阅者之间的位置传递,可实现档案的自助式借阅管理,提升管理效率,降低管理者的工作强度。
5.为解决上述技术问题,本发明采用的一个技术方案是:提供
6.一种可自动存取档案的档案架,包括架体,所述架体内设置有多个沿垂向等距分
布的放置架板,所述放置架板上放置有档案盒,档案盒的背脊上设置有编码,所述架体的侧面固定设置有垂向定位装置,所述放置架板的侧方对应地固定设置有水平定位装置,所述垂向定位装置上固定设置有与水平定位装置位于同侧的第一夹持组件,所述第一夹持组件上可分离地夹持有抓取机械手机构,每个水平定位装置上固定设置有第二夹持组件;
7.所述垂向定位装置驱动第一夹持组件垂向移动并停留于其中一个第二夹持组件水平一侧的切换位置,通过该第二夹持组件对抓取机械手机构的夹持和第一夹持组件对抓取机械手机构的释放,完成抓取机械手机构从垂向定位装置到该第二夹持组件所在的水平定位装置上的位置切换;
8.水平定位装置驱动抓取机械手机构至指定地点,抓取机械手机构完成档案盒的抓取/存放,水平定位装置驱动抓取机械手机构返回至切换位置,通过第一夹持组件对抓取机械手机构的夹持和该第二夹持组件对抓取机械手机构的释放,完成抓取机械手机构从该第二夹持组件所在的水平定位装置到垂向定位装置上的位置切换。
9.进一步的,所述抓取机械手机构包括基座、固定设置于基座上方的转向定位电机、固定连接于转向定位电机顶部输出端的转动盘,所述转动盘的顶面固定安装有机械手水平定位装置,所述机械手水平定位装置上固定设置有机械手垂向定位装置,所述机械手垂向定位装置的顶部固定安装有机械手组件。
10.进一步的,所述机械手垂向定位装置包括垂向定位安装架、固定安装于垂向定位安装架底部的垂向定位驱动电机、固定连接于垂向定位驱动电机输出轴端的第一丝杠、螺纹套接于第一丝杠上的第一螺母座,所述第一螺母座的顶部固定连接有至少一个活动贯穿垂向定位安装架顶部的导向杆,所述机械手组件固定连接于导向杆的顶端。
11.进一步的,所述机械手组件包括安装架板、固定安装于安装架板一侧壁上的夹持驱动电机、固定连接于夹持驱动电机输出轴端并转动安装于安装架板内的双头螺杆,所述双头螺杆的两端分别螺纹连接有相对设置的夹持手指,夹持驱动电机通过双头螺杆驱动两个夹持手指相互靠近或相互远离。
12.进一步的,所述基座的顶面两侧分别开设有第一压槽和第二压槽,基座的一端侧面内设置有第一插接孔组、另一端侧面内设置有第二插接孔组,第一插接孔组和第二插接孔组内均设置有接线端子。
13.进一步的,所述第一夹持组件包括固定安装于垂向定位装置上第一托板、固定安装于第一托板顶面上的第一夹持支架、固定安装于第一夹持支架顶部的第一夹持电机,所述第一夹持电机的输出轴端固定连接有第二丝杠,所述第二丝杠上螺纹套接有第二螺母座,第二螺母座的端面上固定连接有位于基座上方的第一压板,所述第一压板的底面固定设置有与第一压槽相匹配的第一凸起,所述第一托板的顶面靠近基座的一侧固定设置有与接线端子对应插接的第一接线柱体。
14.还提供了一种档案自动存取机器人,应用于所述的可自动存取档案的档案,包括avg运载车、固定设置于avg运载车上的放置台,所述放置台的内部一侧转动安装有载台转轴,放置台的内部设置有驱动载台转轴步进转动的驱动装置,载台转轴上设置有四个圆周均匀分布的载台,其中一个载台的顶面与放置台的顶面位于同一水平面内,且该载台所处位置为档案盒的借还-存取位置,其中一个载台处于垂直状态,且该载台所处位置为档案盒的借还-取放位置;
15.放置台的内部另一侧分别设置有位于借还-存取位置一侧的存储箱和位于存储箱一侧的垂向升降驱动装置,所述垂向升降驱动装置上固定设置有位于存储箱内的升降载台,所述存储箱靠近载台一侧的侧壁上开设有通口;
16.所述放置台的顶面一侧分别设置有推进定位装置和送出定位装置,所述推进定位装置上固定设置有位于载台远离通口的一侧且与通口相对应的推进板,所述送出定位装置上固定设置有位于存储箱远离载台的一侧且与通口相对应的推送盒体;
17.所述放置台的外壁上还固定设置有位于推进板远离存储箱的因此而并与通口相对应的扫码装置。
18.进一步的,所述载台的承载面靠近载台转轴的一侧内部设置有感应检测装置,载台的承载面相对的侧面靠近载台转轴的一侧固定设置有永磁铁块。
19.进一步的,所述放置台的顶面上还设置有显示器,放置台的内部还放置有主控机。
20.还提供了一种基于所述的档案自动存取机器人的档案自动存取方法,包括借阅档案和归还档案两个过程:
21.借阅档案的过程包括以下步骤:
22.s101、借阅者通过档案管理系统或客户端查询所要借阅的档案,并发出借阅请求;
23.s102、具有借阅管理权限的管理员授权通过借阅请求,借阅信息和授权指令经局域网传送至档案自动存取机器人内部的主控机,并依次排队;
24.s103、主控机接收借阅信息和授权指令后,按照授权指令的先后顺序驱动avg运载车(8)到达存放所借阅的档案所对应的档案架处,并在预设的档案转移位置停驻;
25.s104、垂向定位装置驱动第一夹持组件和抓取机械手机构垂向定位至存放所借阅的档案所对应的放置架板处;
26.s105、与该放置架板对应位置的水平定位装置驱动对应的第二夹持组件靠近第一夹持组件至切换位置,该第二夹持组件与抓取机械手机构对接后,该第二夹持组件将抓取机械手机构夹持,同时第一夹持组件将抓取机械手机构释放,该水平定位装置驱动抓取机械手机构至所借阅的档案所在的位置;
27.s106、抓取机械手机构的夹持部位将放置有所借阅的档案的档案盒夹持并提升,进而从放置架板上的档案盒中抽离出来;
28.s107、水平定位装置驱动第二夹持组件和抓取机械手机构返回至切换位置,第一夹持组件与抓取机械手机构对接后,第一夹持组件将抓取机械手机构夹持,同时该第二夹持组件将抓取机械手机构释放,该水平定位装置驱动该第二夹持组件反向移动至初始位置,使该第二夹持组件与抓取机械手机构分离;
29.s108、垂向定位装置驱动第一夹持组件和抓取机械手机构垂向定位至初始位置,抓取机械手机构向朝着档案架一侧的方向水平转动270
°
,此时抓取机械手机构上夹持的档案盒位于处于垂直状态的载台的承载面一侧上方,抓取机械手机构将档案盒降低并释放,档案盒自然落至下一个载台的承载背面上并与该载台的承载面贴合,抓取机械手机构的抓取部位高度提升并与档案盒分离;
30.s109、驱动装置驱动载台转轴正向步进转动90
°
,此时该垂直状态的载台处于水平状态,档案盒由借还-取放位置变为借还-存取位置,扫码装置读取档案盒背脊上的编码信息,将读取结果传送至主控机,主控机记录该次取出过程已取档案盒的数量及每个档案盒
对应的编码信息;
31.s110、推进定位装置驱动推进板水平移动,推进板推动档案盒从通口进入存储箱内,而后推进定位装置驱动推进板复位,此时档案盒位于升降载台的顶面上;
32.s111、垂向升降驱动装置驱动升降载台下降一个单位距离,使其上方的档案盒的顶面不高于放置台的顶面;
33.s112、主控机在借阅信息队列里移出该条借阅信息,继续查询借阅信息,若无剩余借阅信息,则档案取出过程结束,若还有借阅信息且存储箱内的存储数量未到限定值,则重复执行步骤s103至步骤s111继续完成档案盒的取出过程;
34.s113、取出过程完成后,主控机驱动avg运载车到达档案拿取位置,等待借阅人拿取;
35.s114、借阅人在拿取位置验证身份信息,验证通过后,垂向升降驱动装置驱动升降载台及其上的堆码的档案盒整体步进上升,扫码装置对档案盒背脊上的编码信息进行逐个扫描,直至所读取的编码信息与借阅者所借阅的档案所存放的档案盒的信息一致,此时垂向升降驱动装置暂停工作;
36.s115、送出定位装置驱动推送盒体将位于通口位置的档案盒从存储箱内推出至载台的上方,驱动装置驱动载台转轴反向步进转动90
°
,此时该水平状态的载台处于垂直状态,档案盒由借还-存取位置变为借还-取放位置,其档案盒位于借阅者所在侧,而后送出定位装置驱动推送盒体复位;
37.s116、借阅者将所借阅的档案盒从载台上取走后,主控机内记录的存储箱存储数量减一,若该存储数量为零,则结束拿取过程,若该存储数量不为零,则重复执行步骤s114至步骤s115继续完成档案盒的拿取过程;
38.归还档案的过程包括以下步骤:
39.s201、借阅者通过档案管理系统或客户端预约归还所借阅的档案,并发出归还请求信息,归还请求信息经局域网传送至档案自动存取机器人内部的主控机;
40.s202、主控机接收归还请求信息后,驱动avg运载车到达档案归还位置后停驻;
41.s203、借阅者将需要归还的档案盒按照规定的位姿放置在处于垂直状态的载台的承载面上,驱动装置驱动载台转轴反向步进转动90
°
,此时该垂直状态的载台处于水平状态,档案盒由借还-取放位置变为借还-存取位置,扫码装置读取档案盒背脊上的编码信息,将读取结果传送至主控机,主控机记录该次归还过程已还档案盒的数量及每个档案盒对应的编码信息;
42.s204、推进定位装置驱动推进板水平移动,推进板推动档案盒从通口进入存储箱内,而后推进定位装置驱动推进板复位,此时档案盒位于升降载台的顶面上;
43.s205、垂向升降驱动装置驱动升降载台下降一个单位距离,使其上方的档案盒的顶面不高于放置台的顶面;
44.s206、主控机等待一定时间,继续接收归还信息,若无新增的归还信息,则档案归还过程结束,若还有新增的归还信息且存储箱内的存储数量未到限定值,则重复执行步骤s203至步骤s205继续完成档案盒的归还过程;
45.s207、归还过程完成后,主控机根据扫码装置最后一次读取的编码信息查询该编码信息所对应的档案盒在档案架上对应的摆放位置,并驱动avg运载车到达对应的档案架
处,并在预设的档案转移位置停驻;
46.s208、垂向升降驱动装置驱动升降载台上升一个单位距离,使其上方的档案盒位于存储箱的通口位置;
47.s209、送出定位装置驱动送出盒体将位于通口位置的档案盒从存储箱内推出至载台的上方,而后送出定位装置驱动送出盒体复位,驱动装置驱动载台转轴反向步进转动90
°
,此时该水平状态的载台处于垂直状态,档案盒由借还-存取位置变为借还-取放位置,此时档案盒位于抓取机械手机构的正下方;
48.s210、抓取机械手机构的抓取部位下降并夹持档案盒,而后抓取机械手机构的专区部位上升并将档案盒从载台上提起;
49.s211、垂向定位装置驱动第一夹持组件和抓取机械手机构垂向定位至存放所归还的档案所对应的放置架板处,抓取机械手机构向朝着档案架一侧的方向水平转动270
°
,此时被夹持的档案盒背脊上的编码朝外;
50.s212、与该放置架板对应位置的水平定位装置驱动对应的第二夹持组件靠近第一夹持组件至切换位置,该第二夹持组件与抓取机械手机构对接后,该第二夹持组件将抓取机械手机构夹持,同时第一夹持组件将抓取机械手机构释放,该水平定位装置驱动抓取机械手机构至所归还的档案所在的位置;
51.s213、抓取机械手机构将所归还的档案的档案盒推送至其在放置架板上原来所处的位置,进而抓取机械手机构下降,将档案盒放置于放置架板上;
52.s214、抓取机械手机构的抓取部位从档案盒内抽离出来,水平定位装置驱动第二夹持组件和抓取机械手机构返回至切换位置,第一夹持组件与抓取机械手机构对接后,第一夹持组件将抓取机械手机构夹持,同时该第二夹持组件将抓取机械手机构释放,该水平定位装置驱动该第二夹持组件反向移动至初始位置,使该第二夹持组件与抓取机械手机构分离;
53.s215、垂向定位装置驱动第一夹持组件和抓取机械手机构垂向定位至初始位置;
54.s216、完成一个档案的放置过程后,主控机内记录的存储箱存储数量减一,若该存储数量为零,则结束放置过程,若该存储数量不为零,该归还请求信息从归还请求队列中清除,则重复执行步骤s207至步骤s215继续完成档案盒的放置过程。
55.与现有技术相比较,本发明的有益效果如下:
56.1.本发明通过在档案架上设置可垂向和水平方向移动定位的抓取机械手机构,完成借阅阶段档案盒在档案架上的自动选取、转移和送出,以及归还阶段档案盒在档案架上的自动定位和放置,通过设置配套的档案自动存取机器人,完成档案盒在档案柜与借阅者之间的位置传递,可实现档案的自助式借阅管理,提升了管理效率,降低了管理者的工作强度;
57.2.本发明通过将档案柜与档案盒的拿取或归还位置设置在两个独立位置,通过档案自动存取机器人实现两个位置的沟通连接,可避免借阅者进入档案放置区域,以提升档案放置的安全性,也可避免传统的档案管理中借阅者的拿取和放回操作对档案盒的放置位置造成混乱,以便于后续对所要查找档案的快速和准确定位;
58.3.本发明的档案架和自动存取机器人可通过内部的局域网与现有的档案管理系统进行通讯网络的搭建,通过现场或线上预约的方式完成档案的借阅请求和归还请求,通
过档案自动存取机器人完成预约借阅档案的集中拿取及送出和预约归还档案的集中收集及放置上架,可有效减少借阅者不必要的等待时间,极大提升了管理工作的效率。
附图说明
59.图1为本发明所使用的档案盒的立体结构示意图;
60.图2为本发明的可自动存取档案的档案架的立体结构示意图;
61.图3为本发明的可自动存取档案的档案架放置档案盒状态的立体结构示意图;
62.图4为抓取机械手机构的立体结构示意图;
63.图5为基座的立体机构示意图之一;
64.图6为基座的立体机构示意图之二;
65.图7为第一夹持组件的立体结构示意图;
66.图8为第二夹持组件的立体结构示意图;
67.图9为第一夹持组件夹持抓取机械手机构状态的示意图;
68.图10为第二夹持组件夹持抓取机械手机构状态的示意图;
69.图11为抓取机械手机构从垂向定位装置向水平定位装置转移前状态的示意图;
70.图12为抓取机械手机构从垂向定位装置向水平定位装置转移后状态的示意图;
71.图13为所述抓取机械手机构在档案柜上抓取/放置档案盒状态的示意图;
72.图14为抓取机械手机构从水平定位装置向垂向定位装置转移前状态的示意图;
73.图15为抓取机械手机构从水平定位装置向垂向定位装置转移后状态的示意图;
74.图16为所述抓取机械手机构在档案自动存取机器人上抓取/放置档案盒的状态示意图;
75.图17为本发明的所述档案自动存取机器人的立体结构示意图之一;
76.图18为本发明的所述档案自动存取机器人的立体结构示意图之二;
77.图19为载台转轴和载台的立体结构示意图;
78.图20为放置台上各部件的位置分布示意图;
79.图21为档案盒位于借还-取放位置状态的示意图;
80.图22为档案盒位于借还-存取位置状态的示意图;
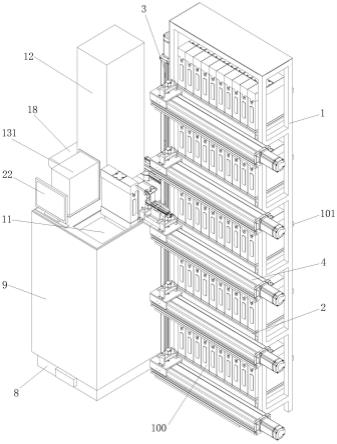
81.图23为本发明的可自动存取档案的档案架与档案自动存取机器人配合工作状态的示意图。
82.图中:1架体、101横梁板、102隔条、2放置架板、3垂向定位装置、4水平定位装置、5第一夹持组件、501第一托板、502第一夹持支架、503第一夹持电机、504第一压板、505第一凸起、506第一接线柱体、507第一导向柱、508第二螺母座、6抓取机械手机构、601基座、6011第一压槽、6012第二压槽、6013第一插接孔组、602转向定位电机、603转动盘、604机械手水平定位装置、605机械手垂向定位装置、6051垂向定位驱动电机、6052导向杆、6053第一螺母座、6054垂向定位安装架、606机械手组件、6061安装架板、6062夹持驱动电机、6063双头螺杆、6064夹持手指、607转位电机支架、7第二夹持组件、701第二托板、702第二夹持支架、703第二夹持电机、704第二压板、705第二凸起、706第二接线柱体、707第二导向柱、708第二螺母座、8avg运载车、9放置台、10载台转轴、11载台、12存储箱、13垂向升降驱动装置、131保护壳罩、14升降载台、15推进定位装置、16送出定位装置、17推进板、18推送盒体、19扫码装置、
20感应检测装置、21永磁铁块、22显示器、100档案盒。
具体实施方式
83.下面结合附图对本发明的较佳实施例进行详细阐述,以使本发明的优点和特征能更易于被本领域技术人员理解,从而对本发明的保护范围做出更为清楚明确的界定。
84.请参阅图1,本发明提出的可自动存取档案的档案架以及档案自动存取机器人,需要使用专用的档案盒作为操作对象,该档案盒100的具体结构和使用方式,可参考本笔者已申请的专利:一种使用方便的档案盒,授权公告号:cn 217170312 u,此处不作赘述。本实施例中,档案盒的整体外部尺寸规格为长220mm*宽55mm*高310mm,可满足标准a4及以下尺寸规格的纸质材料的保存。
85.请参阅图2和图3,一种可自动存取档案的档案架,包括架体1,架体1采用方形管材焊接而成的框架结构,可根据美观性的需求在架体1的上、下、左、右、后等侧面方向设置围板。
86.架体1内设置有多个沿垂向等距分布的放置架板2,放置架板2上放置有档案盒100,档案盒100的背脊上设置有编码。放置架板2为顶部开口的钣金槽结构,其槽深度约为30mm(与档案盒100的下壳体的高度接近即可),前、后方向上的槽内宽度为225mm(略大于档案盒100的下壳体长度即可),左、右方向上的长度为600mm(具体宽度以单层放置架板2上需要放置的档案盒100的具体数量而定,略大于单层放置的所有的档案盒100的下壳体累加宽度即可),使得多个档案盒100依次毗邻放置在放置架板2上后,档案盒100下壳体内部底侧的磁块可吸附放置架板2的槽底面上,相邻两个档案盒100可通过设置在下壳体侧面内的下磁条之间的吸附作用和设置在上壳体侧面内的上磁条之间的吸附作用而连接为整体,以增强档案盒100在放置架板2上放置时的稳定性。
87.优选的,架体1的背面上固定设置有位于放置架板2上方一侧且水平设置的横梁板101,横梁板101的侧面上固定设置有若干个等间距设置的隔条102,每个隔条102的厚度为档案盒100下壳体的侧面壁厚的两倍,使得隔条102可插入两个毗邻的档案盒100中部位置的间隙中;且隔条102位于档案盒100的上壳体底部边缘的下方附近位置,以便某个档案盒100在抽离或插入的过程中,保持该档案盒100两侧的档案盒100不会发生倾倒或位置偏移。
88.相邻两层放置架板2之间的净间距为350mm,使得某个档案盒100在被抽离或插入时,其与相邻两侧的档案盒100在高度上可具备一定的高度差,使得其上壳体内的上磁条位于相邻的档案盒100的上磁条的上方、其下壳体内的下磁条位移相邻的档案盒100的中部位置,即解除放置架板2对该档案盒100的吸附作用以及其与相邻的档案盒100之间的吸附作用,以实现该档案盒100的顺利抽离或放置。本实施例中,如图2所示,放置架板2共设置有5层,则连通架体1底部的支脚高度和顶板厚度,档案架的整体高度约为2000mm,与现有的档案架高度接近,可充分利用档案室的有效空间。
89.架体1的侧面(如图2中所示的左侧面)上固定设置有垂向定位装置3,放置架板2的侧方(如图2中所示的档案柜正面)对应地固定设置有水平定位装置4。为提高定位装置的定位精度、降低定位装置在运行过程中产生的噪音,且降低部件的生产加工成本,本实施例中,所有的定位装置均采用伺服电机驱动的滚珠丝杠传动式线性模组。垂向定位装置3的运动输出部件的有效行程需覆盖每个放置架板2所在的高度位置,每个水平定位装置4的运动
输出部件的有效行程需覆盖整个放置架板2的长度方向。垂向定位装置3和水平定位装置4的运动控制模块(图中未示出)均通过档案室内的局域网络与档案管理系统通讯连接(均为现有技术)。
90.垂向定位装置3上固定设置有与水平定位装置4位于同侧的第一夹持组件5,第一夹持组件5上可分离地夹持有抓取机械手机构6,每个水平定位装置4上固定设置有第二夹持组件7。
91.如图4所示,抓取机械手机构6包括基座601、固定设置于基座601上方的转向定位电机602、固定连接于转向定位电机602顶部输出端的转动盘603,转动盘603的顶面固定安装有机械手水平定位装置604,机械手水平定位装置604上固定设置有机械手垂向定位装置605,机械手垂向定位装置605的顶部固定安装有机械手组件606。具体的,基座601为立方体结构,其顶面中处通过螺钉固定连接有龙门架式的转位电机支架607,转向定位电机602采用伺服电机,其固定安装于转位电机支架607的顶板底部,其输出轴端垂直向上贯穿转位电机支架607的顶部并与转动盘603的底面中心固定插接。转位电机支架607的顶面中心开设有直径与转动盘603的外径相匹配的嵌槽,转动盘603活动嵌设在嵌槽内,且转动盘603的顶面不低于转位电机支架607的顶面,使得机械手水平定位装置604(伺服电机驱动的滚珠丝杠传动式线性模组)固定安装于转动盘603的顶面上后,其可在转向定位电机602的驱动下,在转位电机支架607的上方以预设的固定角度转动,从而实现位置切换和定位。
92.机械手垂向定位装置605包括龙门架式的垂向定位安装架6054、固定安装于垂向定位安装架6054底部的垂向定位驱动电机6051、固定连接于垂向定位驱动电机6051输出轴端的第一丝杠(图中未示出)、螺纹套接于第一丝杠上的第一螺母座6053,第一螺母座6053的顶部固定连接有至少一个(本实施例中为4个)活动贯穿垂向定位安装架6054顶部的导向杆6052,机械手组件606固定连接于导向杆6052的顶端。具体的,垂向定位安装架6054通过螺钉固定安装于机械手水平定位装置装置604顶部的运动输出部件上,其内侧底部焊接设置有电机安装板,垂向定位驱动电机6051采用伺服电机并固定安装在电机安装板的底部,其输出轴端垂直向上地活动贯穿电机安装板并与第一丝杠的底端固定插接,第一丝杠的顶端通过轴承转动安装于垂向定位安装架6054的顶板底面上。通过吹向定位驱动电机6051驱动第一丝杠正向/反向转动,可通过螺纹传动作用下和导向杆6052的导向作用下驱动第一螺母座6053垂向上升/下降,从而带动导杆6052顶端上的机械手组件606同步上升/下降。
93.机械手组件606包括安装架板6061、固定安装于安装架板6061一侧壁上的夹持驱动电机6062、固定连接于夹持驱动电机6062输出轴端并转动安装于安装架板6061内的双头螺杆6063,双头螺杆6063的两端分别螺纹连接有相对设置的夹持手指6064,夹持驱动电机6062通过双头螺杆6063驱动两个夹持手指6064相互靠近或相互远离。具体的,安装架板6061为u型截面,其底面与四个导向杆6052的底端焊接或螺栓连接,其两侧垂直侧板之间的间距为60mm(略大于单个档案盒100的宽度尺寸55mm即可)。夹持手指6064为水平条板结构,其板厚小于档案盒100下壳体的侧面壁厚的两倍,使得夹持手指6064可轻松插入两个毗邻的档案盒100中部位置的间隙中,并在该间隙中具备一定的活动空间,以完成夹持操作。两个夹持手指6064相互靠近的侧壁上分别固定焊接有螺母座,两个螺母座的螺纹导程相同、旋转方向相反,并分别与双头螺杆6063的两端螺纹段螺纹连接,且两个夹持手指6064在安装架板6061内对称设置,通过夹持驱动电机6062可驱动双头螺杆6063正向/反向转动移动
角度,从而通过螺纹传动作用驱动两个夹持手指6064同步地相互靠近/远离,从而实现对档案盒100的夹持/释放功能。优选的,夹持手指604相互远离的侧面上固定设置有活动插接于安装架板6061侧壁内的限位导杆,以使夹持手指604在水平移动过程中保持位姿不变。
94.通过机械手垂向定位装置605可实现机械手组件606在垂直方向上的上升/下降,当机械手组件606处于垂向最低位置时,两个夹持手指6064在水平方向上位于档案盒100的上壳体的底部边缘下方附近;机械手组件606的垂向移动距离范围与档案盒100的顶面距离其上方最近的放置架板2的底面之间的高度差相当,则当机械手组件606垂于垂向最高位置时,被夹持的档案盒100与相邻两侧的档案盒100在高度上可具备一定的高度差,使得其上壳体内的上磁条位于相邻的档案盒100的上磁条的上方、其下壳体内的下磁条位移相邻的档案盒100的中部位置,即解除放置架板2对该档案盒100的吸附作用以及其与相邻的档案盒100之间的吸附作用。通过机械手水平定位装置604可驱动机械手组件606沿水平纵向插入档案盒100的夹持位置,并在夹持完成后,反向驱动机械手组件606及被夹持的档案盒100从放置架板2的上方移出,并在水平定位装置4驱动整个抓取机械手机构6沿水平横向移动过程中,该被夹持的档案盒100不会与其他档案盒100或架体1产生运动干涉。
95.进一步的,如图5和图6所示,基座601的顶面两侧分别开设有第一压槽6011和第二压槽6012,第一压槽6011和第二压槽6012分居于转位电机支架607的两侧。基座601的底面内部嵌装有运动控制子模块(图中未示出),并通过档案室内的局域网络与档案管理系统无线互联(亦均为现有技术)。基座601的一端侧面内设置有第一插接孔组6013、另一端侧面内设置有第二插接孔组,第一插接孔组6013和第二插接孔组内均设置有接线端子,接线端子与运动控制子模块电性连接,且基座601两侧的各个相同接线端子为并联结构。
96.如图7所示,第一夹持组件5包括固定安装于垂向定位装置3上第一托板501、固定安装于第一托板501顶面上的第一夹持支架502、固定安装于第一夹持支架502顶部的第一夹持电机503,第一夹持电机503的输出轴端固定连接有第二丝杠(图中未示出),第二丝杠上螺纹套接有第二螺母座508,第二螺母座508的端面上固定连接有位于基座601上方的第一压板504,第一压板504的底面固定设置有与第一压槽6011相匹配的第一凸起505。具体的,第一托板501的末端安装位置为水平板结构,第一夹持支架502为龙门式支架,且其两侧垂直立板分别位于基座601的外部。第一夹持电机503采用伺服电机,第二丝杠的底端通过轴承转动安装于第一托板501的顶面内,第一压板504空套设置在第二丝杠的外侧。通过第一夹持电机503驱动第二丝杠正向/反向转动一定角度,可通过螺纹传动作用驱动第一压板504下降靠近基座601而将基座601压紧/上升远离基座601而解除压紧。优选的,第一压板504的顶面上固定设置有至少一个垂向设置的第一导向柱507,以保证第一压板504沿垂向运动;第一压槽6011和第二压槽6012的截面为v型,且沿水平纵向分布,第一凸起505与第一压板504为一体结构。第一托板501的顶面靠近基座601的一侧固定设置有与接线端子对应插接的第一接线柱体506,当第一接线柱体506与接线端子对应插接后,可为抓取机械手机构6内的运动控制子模块供电。
97.如图8所示,第二夹持组件7的结构组成及功能与第一夹持组件5的结构组成及功能完全相同,区别仅在于二者分别相对地设置于基座601的两端侧,抓取机械手机构6在垂向定位装置3和水平定位装置4上进行位置切换的过程中,两个夹持组件与基板601支架的位置状态相反。为便于表述,下文中第二夹持组件7与第一夹持组件5中相同的结构名称分
别将冠以“第二”或“第三”,以与第一夹持组件5中的相同结构进行区分。抓取机械手机构6在第一夹持组件5上的夹持状态如图9所示,抓取机械手机构6在第二夹持组件7上的夹持状态如图10所示。
98.在档案盒100的取出过程中,垂向定位装置3驱动第一夹持组件5垂向移动并停留于其中一个第二夹持组件7(该档案盒100所对应的放置层)水平一侧的切换位置,该放置层所对应的水平定位装置4驱动其上的第二夹持组件7向第一夹持组件5所在侧移动,直至第二压板704上的第二凸起705位于基座601上的第二压槽6012的正上方,在这一过程中,第二托板701上的第二接线柱体706与基座601上对应侧的接线端子插接后,与第一接线柱体506形成并联的供电电源,以保证抓取机械手机构6内部的运动控制子模块的正常运行,且对基座601形成水平纵向上的限位作用,如图11所示;而后第二夹持电机703正向转动一定角度,通过第三丝杠(图中未示出)驱动第三螺母座708向下移动,直至第二压板704下降并紧压在基座601的顶面上,且第二凸起705对应地嵌入第二压槽6012中,实现抓取机械手机构6在该第二夹持组件7上的夹紧,以及垂直方向和水平横向上的限位;进而第一夹持电机503反向转动一定角度,驱动第一压板504上升并使第一凸起505与第一压槽6011完全分离,此时第一压板504解除对基座601的压紧作用;该放置层所对应的水平定位装置4驱动其上的第二夹持组件7向远离第一夹持组件5的一侧移动,则第一接线柱体506从对应侧的接线端子中抽离,抓取机械手机构6与第一夹持组件5完全脱离连接关系,如图12所示。即通过该第二夹持组件7对抓取机械手机构6的夹持和第一夹持组件5对抓取机械手机构6的释放,完成抓取机械手机构6从垂向定位装置3到该第二夹持组件7所在的水平定位装置4上的位置切换。
99.水平定位装置4驱动抓取机械手机构6至指定地点,抓取机械手机构6完成档案盒100的抓取/存放,如图13所示。具体的抓取过程为:机械手水平定位装置604正向工作,驱动机械手组件606移动一定距离并靠近目标档案盒100,使两个夹持手指6064插入该档案盒100的中部两侧;夹持驱动电机6062正向转动一定角度,驱动两个夹持手指6064相互靠近一定的距离,使两个夹持手指6064将档案盒100夹紧;垂向定位驱动电机6051正向转动一定角度,驱动机械手组件606向上移动一定的距离,使该档案盒100与两侧的档案盒100具有一定的高度差;机械手水平定位装置604反向工作,驱动机械手组件606移动一定距离并远离放置架板2,使该档案盒100与其余的档案盒100之间完全脱离;水平定位装置4驱动第二夹持组件7和抓取机械手机构6朝第一夹持组件5所在侧移动,直至抓取机械手机构6重新位于其切换位置,如图14所示。
100.在这一过程中,第一托板501上的第一接线柱体506与基座601上对应侧的接线端子插接后,与第二接线柱体706形成并联的供电电源,以保证抓取机械手机构6内部的运动控制子模块的正常运行,且对基座601形成水平纵向上的限位作用;而后第一夹持电机503正向转动一定角度,驱动第一压板504下降并紧压在基座601的顶面上,且第一凸起505对应地嵌入第一压槽6011中,实现抓取机械手机构6在第一夹持组件5上的夹紧,以及垂直方向和水平横向上的限位;进而第二夹持电机703反向转动一定角度,驱动第三丝杆驱动第二压板704上升并使第二凸起705与第二压槽6012完全分离,此时第二压板704解除对基座601的压紧作用,如图15所示;该放置层所对应的水平定位装置4驱动其上的第二夹持组件7向远离第一夹持组件5的一侧移动,则第二接线柱体706从对应侧的接线端子中抽离,抓取机械手机构6与第二夹持组件7完全脱离连接关系,如图16所示。即通过第一夹持组件5对抓取机
械手机构6的夹持和该第二夹持组件7对抓取机械手机构6的释放,完成抓取机械手机构6从该第二夹持组件7所在的水平定位装置4到垂向定位装置3上的位置切换。
101.垂向定位装置3驱动第一夹持组件5垂向移动并停留于档案送出位置,如此,则完成了档案盒100的自动取出过程。在档案盒100归还的自动放置过程与上述自动取出过程基本相反,此处不再赘述。
102.请参阅图17和图18,为实现档案盒100的借阅和归还过程中借阅人与档案柜之间的自助操作,还提供了一种档案自动存取机器人,应用于上述可自动存取档案的档案,该档案自动存取机器人包括avg运载车8、固定设置于avg运载车8上的放置台9。avg运载车8采用现有的自动引导物料转运小车,在档案管理室的底面铺设相应的制导电缆,以实现avg运载车8的自动循迹运行。放置台9为方形箱体结构,其顶面离地高度与上述档案架中处于中间层的放置架板2的槽底顶面离地高度接近,约为900mm,既便于机械手组件606在放置台9上完成档案盒100的放置或抓取,也便于借阅者在放置台9上完成档案盒100的拿取或归还。放置台9的顶面上还设置有显示器22,用于显示当前借阅或归还的档案盒状态信息以及借阅者验证信息等,也用于借阅者拿取档案盒100或归还档案盒100时的确认操作;放置台9的内部还放置有主控机,与档案馆的档案管理系统通过局域网互联通讯,用于接收档案管理系统的档案借阅请求信息和档案归还信息,并通过相应的控制程序驱动avg运载车8的运动以及其他机构的运动控制(均为现有技术)。
103.放置台9的内部一侧(靠近档案架的一侧)转动安装有载台转轴10,放置台9的内部设置有驱动载台转轴10步进转动的驱动装置,载台转轴10上设置有四个圆周均匀分布的载台11,如图19所示。在实际工作过程中,其中一个载台11的顶面与放置台9的顶面位于同一水平面内,且该载台11所处位置为档案盒100的借还-存取位置,其中一个载台11处于垂直状态,且该载台11所处位置为档案盒100的借还-取放位置。为防止驱动装置对载台转轴10以及载台11的正常转动产生干涉,且不与存储箱12之间存在位置干涉,本实施例中,驱动装置采用伺服电机驱动、齿轮副传动的形式,通过采用惰轮传动,保证传动精度的同时,有效增加了伺服电机与输出齿轮之间的中心距,可满足装配和传动的要求。
104.放置台9的内部另一侧分别设置有位于借还-存取位置一侧的存储箱12和位于存储箱12一侧的垂向升降驱动装置13,垂向升降驱动装置13上固定设置有位于存储箱12内的升降载台14,存储箱12靠近载台11一侧的侧壁上开设有通口,如图20所示。具体的,存储箱12的内部水平截面轮廓大于档案盒100水平放置时其顶面轮廓,使得档案盒100可在存储箱12内进行堆码存储。通口的顶部边缘高于水平放置状态的档案盒100的顶面、底部边缘不高于放置台9的顶面、通口的两侧边缘均位于水平状态的档案盒100的左右两端的外侧,使得水平状态的档案盒100可由通口水平进入存储箱12内或从存储箱12内水平移出。优选的,垂向升降驱动装置13的顶部外侧设置有固定连接于放置台9的顶面和储存箱12的侧壁上的保护壳罩131。
105.在档案借阅阶段,抓取机械手机构6夹持档案盒100并重新被第一夹持组件5夹紧后,垂向定位装置3驱动抓取机械手机构6移动至初始位置,转向定位电机602驱动转动盘603向朝着档案架一侧的方向(俯视为顺时针方向)水平转动270
°
,此时抓取机械手机构6上夹持的档案盒100位于处于垂直状态的载台11的承载面一侧上方,且档案盒100背脊上的编码信息朝向档案柜所在侧;垂向定位驱动电机6051反向转动一定角度,使机械手组件606下
降至初始高度,此时抓取机械手机构6将档案盒100降低而后释放,档案盒100自然落至下一个载台11的承载背面上并与该载台11的承载面贴合,即档案盒100处于借还-取放位置,而后抓取机械手机构6的抓取部位高度提升并与档案盒100分离,紧接着垂向定位驱动电机6051再正向转动一定角度,使机械手组件606的高度提升并与档案盒100分离。在档案归还阶段,借阅者可将档案盒100背脊上的编码信息朝向档案柜所在侧,垂直地直接将档案盒100放置在借还-取放位置。
106.为便于抓取机械手机构6或借阅者在借还-取放位置拿取档案盒100,载台11的垂直高度设置在档案盒100整体高度的1/2至2/3之间,使得档案盒100的上壳体的底部边缘位于载台11的顶端上方(外侧)。
107.如图21所示,当档案盒100位于借还-取放位置后,驱动装置驱动载台转轴10正向步进转动90
°
,此时该垂直状态的载台11处于水平状态,档案盒100由借还-取放位置变为借还-存取位置。放置台9的外壁上还固定设置有位于推进板17远离存储箱12的因此而并与通口相对应的扫码装置19。扫码装置19读取档案盒100背脊上的编码信息,将读取结果传送至主控机,主控机记录该次取出过程已取档案盒100的数量及每个档案盒100对应的编码信息,或该次归还过程已接收档案盒100的数量及每个档案盒100对应的编码信息。
108.优选的,载台11的承载面靠近载台转轴10的一侧内部设置有感应检测装置20,本实施例中选用红外传感器,用于实时检测载台11上是否有档案盒100。当垂直状态的载台11检测到有档案盒100而水平状态的载台11上未检测到有档案盒100时,主控机才启动驱动装置工作,从而驱动载台转轴10正向步进转动90
°
;当水平状态的载台11上检测到有档案盒100时,不论垂直状态的载台11是否检测到有档案盒100,驱动装置均不工作。
109.进一步的优选的,载台11的承载面相对的侧面靠近载台转轴10的一侧固定设置有永磁铁块21,则当档案盒100处于借还-取放位置时,其侧壁贴靠于垂直状态的载台11上,而其底部则被相邻的且处于水平状态的载台11上的永磁体块21吸附,从而使档案盒100在跟随载台11实现位置切换时,不会从载台11上脱落或发生位置偏移。
110.放置台9的顶面一侧分别设置有推进定位装置15和送出定位装置16,推进定位装置15上固定设置有位于载台11远离通口的一侧且与通口相对应的推进板17,送出定位装置16上固定设置有位于存储箱12远离载台11的一侧且与通口相对应的推送盒体18。在档案借阅阶段,在档案自动存取机器人位于档案柜的一侧,通过抓取机械手机构6完成档案盒100在档案自动存取机器人位于档案柜之间进行交换的过程中,或在档案归还阶段,在档案自动存取机器人接收借阅人归还的档案盒100的过程中,当档案盒100处于借还-存取位置时,档案盒100处于水平放置状态并位于存储箱12的通口正前方,此时推进定位装置15驱动推进板17水平纵向(朝着存储箱12所在侧)移动,推进板17推动档案盒100从通口进入存储箱12内,而后推进定位装置15驱动推进板17复位,此时档案盒100位于升降载台14的顶面上。优选的,为避免推进板17对扫码装置19的遮挡,在推进板17的中部开设有通孔,使扫码装置19可透过通孔对档案盒100背脊上的编码信息进行完整扫描。存储箱12的通口两侧设置有向外倾斜的导流板,使得推进板17推动档案盒100水平移动的过程中,档案盒100的两端可沿导流板的侧面逐渐通口位置进行矫正,以使档案盒100能够顺利进入存储箱12内。
111.垂向升降装置13也采用伺服电机驱动的滚珠丝杠传动式线性模组,储存箱13在靠近垂向升降装置13一侧的侧壁上开设有垂向通孔,升降载台14的一侧通过贯穿垂向通孔的
连接板与垂向升降装置13的运动输出部件固定连接。当档案盒100进入储存箱12内部后,垂向升降装置13正向工作,驱动升降载台14下降一个单位距离(即档案盒100水平放置状态对应的高度,本实施例中为55mm),使其上方的档案盒100的顶面不高于放置台9的顶面,则后续的处于借还-存取位置的档案盒100可被继续推入储存箱12的内部进行逐层堆码,以实现在不通过阶段下,多个从档案架上取出的档案盒100或从借阅者处接收到的其归还的档案盒100的临时存储。为此,存储箱12位于放置台9顶面上方的垂直高度不应小于其位于放置台9顶面下方的垂直高度。
112.在档案借阅阶段,在借阅者从档案自动存取机器人上拿取档案盒100的过程中,垂向升降装置13反向工作,驱动升降载台14以一个单位距离(即档案盒100水平放置状态对应的高度,本实施例中为55mm)逐渐步进上升,扫码装置19对档案盒100背脊上的编码信息进行逐个扫描,直至所读取的编码信息与借阅者所借阅的档案所存放的档案盒100的信息一致,此时垂向升降驱动装置13暂停工作,送出定位装置16驱动推送盒体18将位于通口位置的档案盒100从存储箱12内推出至载台11的上方,即位于借还-存取位置。在档案归还阶段,在抓取机械手机构6从档案自动存取机器人处抓取档案盒100的过程中,垂向升降装置13反向工作,驱动升降载台14以一个单位距离(即档案盒100水平放置状态对应的高度,本实施例中为55mm)逐渐步进上升,扫码装置19对档案盒100背脊上的编码信息进行逐个扫描,直至所读取的编码信息与该档案柜上应归还的档案盒100的信息一致,此时垂向升降驱动装置13暂停工作,送出定位装置16驱动推送盒体18将位于通口位置的档案盒100从存储箱12内推出至载台11的上方,即位于借还-存取位置。
113.优选的,存储箱12在于通口相对的后侧侧壁上也开设有通口,推送盒体18的轮廓及尺寸与档案盒100相同,且位于存储箱12后侧侧壁的外侧,其侧面通过连接板与送出定位装置16的运动输出部件固定连接,连接板活动贯穿存储箱12的侧壁,使得推送盒体18可将位于通口处的档案盒100从存储箱12内完全推出,且在整个推送过程中,处于被推出的档案盒100上方的档案盒100则停留在推送盒体18的顶面,而后送出定位装置16驱动推送盒体18复位,则其上方的档案盒100则整体下落至下方的档案盒100上或升降载台14上。为保证存储箱12的整体强度,存储箱12的侧壁上固定设置有加强板。亦可采用u型连杆,将推送盒体18的后侧侧面通过u型连杆与送出定位装置16的运动输出部件固定连接,则保证推送盒体18能够将位于升降载台14上的档案盒100从存储箱12内完全推出的功能外,无需在存储箱12的侧壁上开设通槽,以保证存储箱12自身的完整性和整体强度。
114.在借阅阶段,在借阅者从档案自动存取机器人上拿取档案盒100的过程中,或在档案归还阶段,在抓取机械手机构6从档案自动存取机器人处抓取档案盒100的过程中,当档案盒100从存储箱12内被推出至借还-存取位置后(如图22所示),驱动装置驱动载台转轴10反向步进转动90
°
,此时该水平状态的载台11处于垂直状态,档案盒100由借还-存取位置变为借还-取放位置,其档案盒100位于借阅者所在侧或抓取机械手机构6的抓取位置。此阶段中,当垂直状态的载台11上检测到有档案盒100时,不论水平状态的载台11是否检测到有档案盒100,驱动装置均不工作;当水平状态的载台11检测到有档案盒100而垂直状态的载台11上未检测到有档案盒100时,主控机才启动驱动装置工作,从而驱动载台转轴10反向步进转动90
°
。
115.同时,请参阅图23,本发明还提供一种基于上述的档案自动存取机器人的档案自
动存取方法,包括借阅档案和归还档案两个过程:
116.借阅档案的过程包括以下步骤:
117.s101、借阅者通过档案管理系统或客户端查询所要借阅的档案,并发出借阅请求;
118.s102、具有借阅管理权限的管理员授权通过借阅请求,借阅信息和授权指令经局域网传送至档案自动存取机器人内部的主控机,并依次排队;
119.s103、主控机接收借阅信息和授权指令后,按照授权指令的先后顺序驱动avg运载车8到达存放所借阅的档案所对应的档案架处,并在预设的档案转移位置停驻;
120.s104、垂向定位装置3驱动第一夹持组件5和抓取机械手机构6垂向定位至存放所借阅的档案所对应的放置架板2处;
121.s105、与该放置架板2对应位置的水平定位装置4驱动对应的第二夹持组件7靠近第一夹持组件5至切换位置,该第二夹持组件7与抓取机械手机构6对接后,该第二夹持组件7将抓取机械手机构6夹持,同时第一夹持组件5将抓取机械手机构6释放,该水平定位装置4驱动抓取机械手机构6至所借阅的档案所在的位置;
122.s106、抓取机械手机构6的夹持部位将放置有所借阅的档案的档案盒100夹持并提升,进而从放置架板2上的档案盒100中抽离出来;
123.s107、水平定位装置4驱动第二夹持组件7和抓取机械手机构6返回至切换位置,第一夹持组件5与抓取机械手机构6对接后,第一夹持组件5将抓取机械手机构6夹持,同时该第二夹持组件7将抓取机械手机构6释放,该水平定位装置4驱动该第二夹持组件7反向移动至初始位置,使该第二夹持组件7与抓取机械手机构6分离;
124.s108、垂向定位装置3驱动第一夹持组件5和抓取机械手机构6垂向定位至初始位置,抓取机械手机构6向朝着档案架一侧的方向水平转动270
°
,此时抓取机械手机构6上夹持的档案盒100位于处于垂直状态的载台11的承载面一侧上方,抓取机械手机构6将档案盒100降低并释放,档案盒100自然落至下一个载台11的承载背面上并与该载台11的承载面贴合,抓取机械手机构6的抓取部位高度提升并与档案盒100分离;
125.s109、驱动装置驱动载台转轴10正向步进转动90
°
,此时该垂直状态的载台11处于水平状态,档案盒100由借还-取放位置变为借还-存取位置,扫码装置19读取档案盒100背脊上的编码信息,将读取结果传送至主控机,主控机记录该次取出过程已取档案盒100的数量及每个档案盒100对应的编码信息;
126.s110、推进定位装置15驱动推进板17水平移动,推进板17推动档案盒100从通口进入存储箱12内,而后推进定位装置15驱动推进板17复位,此时档案盒100位于升降载台14的顶面上;
127.s111、垂向升降驱动装置13驱动升降载台14下降一个单位距离,使其上方的档案盒100的顶面不高于放置台9的顶面;
128.s112、主控机在借阅信息队列里移出该条借阅信息,继续查询借阅信息,若无剩余借阅信息,则档案取出过程结束,若还有借阅信息且存储箱12内的存储数量未到限定值,则重复执行步骤s103至步骤s111继续完成档案盒100的取出过程;
129.s113、取出过程完成后,主控机驱动avg运载车8到达档案拿取位置,等待借阅人拿取;
130.s114、借阅人在拿取位置验证身份信息,验证通过后,垂向升降驱动装置13驱动升
降载台14及其上的堆码的档案盒100整体步进上升,扫码装置19对档案盒100背脊上的编码信息进行逐个扫描,直至所读取的编码信息与借阅者所借阅的档案所存放的档案盒100的信息一致,此时垂向升降驱动装置13暂停工作;
131.s115、送出定位装置16驱动推送盒体18将位于通口位置的档案盒100从存储箱12内推出至载台11的上方,驱动装置驱动载台转轴10反向步进转动90
°
,此时该水平状态的载台11处于垂直状态,档案盒100由借还-存取位置变为借还-取放位置,其档案盒100位于借阅者所在侧,而后送出定位装置16驱动推送盒体18复位;
132.s116、借阅者将所借阅的档案盒100从载台11上取走后,主控机内记录的存储箱12存储数量减一,若该存储数量为零,则结束拿取过程,若该存储数量不为零,则重复执行步骤s114至步骤s115继续完成档案盒100的拿取过程;
133.若还有尚未完成的借阅请求或新增的借阅请求,则尚未完成的借阅请求或新增的借阅请求重新依次排队,继续执行上述的自助借阅过程,直至所有的借阅请求确认完成。
134.归还档案的过程包括以下步骤:
135.s201、借阅者通过档案管理系统或客户端预约归还所借阅的档案,并发出归还请求信息,归还请求信息经局域网传送至档案自动存取机器人内部的主控机;
136.s202、主控机接收归还请求信息后,驱动avg运载车8到达档案归还位置后停驻;
137.s203、借阅者将需要归还的档案盒100按照规定的位姿放置在处于垂直状态的载台11的承载面上,驱动装置驱动载台转轴10反向步进转动90
°
,此时该垂直状态的载台11处于水平状态,档案盒100由借还-取放位置变为借还-存取位置,扫码装置19读取档案盒100背脊上的编码信息,将读取结果传送至主控机,主控机记录该次归还过程已还档案盒100的数量及每个档案盒100对应的编码信息;
138.s204、推进定位装置15驱动推进板17水平移动,推进板17推动档案盒100从通口进入存储箱12内,而后推进定位装置15驱动推进板17复位,此时档案盒100位于升降载台14的顶面上;
139.s205、垂向升降驱动装置13驱动升降载台14下降一个单位距离,使其上方的档案盒100的顶面不高于放置台9的顶面;
140.s206、主控机等待一定时间,继续接收归还信息,若无新增的归还信息,则档案归还过程结束,若还有新增的归还信息且存储箱12内的存储数量未到限定值,则重复执行步骤s203至步骤s205继续完成档案盒100的归还过程;
141.s207、归还过程完成后,主控机根据扫码装置19最后一次读取的编码信息查询该编码信息所对应的档案盒100在档案架上对应的摆放位置,并驱动avg运载车8到达对应的档案架处,并在预设的档案转移位置停驻;
142.s208、垂向升降驱动装置13驱动升降载台14上升一个单位距离,使其上方的档案盒100位于存储箱12的通口位置;
143.s209、送出定位装置16驱动送出盒体18将位于通口位置的档案盒100从存储箱12内推出至载台11的上方,而后送出定位装置16驱动送出盒体18复位,驱动装置驱动载台转轴10反向步进转动90
°
,此时该水平状态的载台11处于垂直状态,档案盒100由借还-存取位置变为借还-取放位置,此时档案盒100位于抓取机械手机构6的正下方;
144.s210、抓取机械手机构6的抓取部位下降并夹持档案盒100,而后抓取机械手机构6
的专区部位上升并将档案盒100从载台11上提起;
145.s211、垂向定位装置3驱动第一夹持组件5和抓取机械手机构6垂向定位至存放所归还的档案所对应的放置架板2处,抓取机械手机构6向朝着档案架一侧的方向水平转动270
°
,此时被夹持的档案盒100背脊上的编码朝外;
146.s212、与该放置架板2对应位置的水平定位装置4驱动对应的第二夹持组件7靠近第一夹持组件5至切换位置,该第二夹持组件7与抓取机械手机构6对接后,该第二夹持组件7将抓取机械手机构6夹持,同时第一夹持组件5将抓取机械手机构6释放,该水平定位装置4驱动抓取机械手机构6至所归还的档案所在的位置;
147.s213、抓取机械手机构6将所归还的档案的档案盒100推送至其在放置架板2上原来所处的位置,进而抓取机械手机构6下降,将档案盒100放置于放置架板2上;
148.s214、抓取机械手机构6的抓取部位从档案盒100内抽离出来,水平定位装置4驱动第二夹持组件7和抓取机械手机构6返回至切换位置,第一夹持组件5与抓取机械手机构6对接后,第一夹持组件5将抓取机械手机构6夹持,同时该第二夹持组件7将抓取机械手机构6释放,该水平定位装置4驱动该第二夹持组件7反向移动至初始位置,使该第二夹持组件7与抓取机械手机构6分离;
149.s215、垂向定位装置3驱动第一夹持组件5和抓取机械手机构6垂向定位至初始位置;
150.s216、完成一个档案的放置过程后,主控机内记录的存储箱12存储数量减一,若该存储数量为零,则结束放置过程,若该存储数量不为零,该归还请求信息从归还请求队列中清除,则重复执行步骤s207至步骤s215继续完成档案盒100的放置过程。
151.若还有尚未完成的归还请求或新增的归还请求,则主控机清除之前已完成的归还请求信息,继续执行上述的自助归还过程,直至接收到与所有归还请求数量和信息均一致的档案盒100,并完成所有档案盒100在档案架上的归位工作。
152.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1