一种基于图像检测的智能制造检测系统
1.本发明涉及检测装置领域,尤其涉及一种基于图像检测的智能制造检测系统。
背景技术:
2.图像检测即视觉检测,其是用机器代替人眼来做测量和判断。视觉检测是指通过机器视觉产品将被摄取目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作,随着科技的发展,其运用的技术也较为成熟,在智能制造的过程中,图像检测也是运用的较为广泛。
3.但是在实际的使用过程中,需要对物件进行全面检测时,现有机构一般采用翻面或者机械手伴随,整体上增加设计成本,同时在整个检测过程中,需要进行间断性的暂停,以使得检测继续,整体上的效率有点降低。
技术实现要素:
4.为解决检测工作有暇滋的技术问题,本发明提供一种基于图像检测的智能制造检测系统。
5.本发明采用以下技术方案实现:机箱,其一侧转动连接有多个移动辊,所述运输辊设置有两组,两组所述移动辊上连接有相对应的运输带;
6.夹具,其连接在运输带上,所述夹具夹持有待检物件,两个运输带行的夹具相互对应;
7.驱动机构,其与机箱相连接,且其输出端驱动两个运输带同时移动;
8.检测机构,其设置有两个,分别位于两个运输带的上方,所述检测机构与机箱相连接;
9.限定套,其设置在检测机构的外侧,且其与机箱固定连接。
10.作为上述方案的进一步改进,所述夹具包括:
11.功能盒,其底部固定连接有磁铁;
12.安装孔,其设置在功能盒上,其内连接有防护机构;
13.齿轮,其设置在功能盒上,其中间固定连接有功能盒转动连接的支撑轴;
14.调节杆,其一端与齿轮固定连接,另一端固定连接有压缩盒,所述压缩盒的顶部设置有多个滑动槽;
15.放置架,其滑动套设在压缩盒的顶部,其底端固定连接有与压缩盒内壁滑动套接的压缩板;
16.软管,其一端与压缩板相连接,另一端连接有位于滑动槽内的调节套,所述调节套的一端与压缩盒固定连接,另一端连接有与滑动槽滑动套接的滑块;
17.限定板,其与滑块固定连接,其一侧滚动镶嵌多过个滚珠。
18.作为上述方案的进一步改进,所述所述防护机构包括:
19.限定筒,其通过螺栓与功能盒固定连接,其内部固定连接有第一弹簧;
20.滑动架,其滑动套设在限定筒内,其一端与第一弹簧固定连接,另一端转动连接有接触轮。
21.作为上述方案的进一步改进,所述检测机构包括:
22.清理单元,其设置在机箱内,且其与限定套相连接;
23.工作板,其与机箱滑动套接,其横截面采用l形结构;
24.防护罩,设置有两个,且与上方防护罩与工作板固定,位于下方的防护罩与工作板滑动套接;
25.摄像头,其设置有多个,其与防护罩相连接;
26.调节块,其与位于下方的所述防护罩固定连接,且其与工作板通过销钉相对固定,所述工作板上设置有容纳调节块的调节槽;
27.稳定条,其与机箱固定连接,其另一端滑动套接有齿条,所述齿条和稳定条通过销钉相对固定。
28.作为上述方案的进一步改进,所述清理单元包括:
29.抽水泵,其固定连接在机箱的一侧,其输入端连接有输入管;
30.存储箱,其设置在机箱内,其与输入管相连通;
31.输出管,其与抽水泵的输出端相连接,且其另一端连接有接触器;
32.其中接触器包括:
33.导向管,其为l形管道,且其与输出管相连通,所述导向管与限定套固定连接;
34.喷射嘴,其设置在导向管的一侧,其两侧设置有与导向管固定粘接的清理棉;
35.微型超声波发生器,其固定在导向管内,且其设置有多个。
36.作为上述方案的进一步改进,所述驱动机构包括:
37.驱动电机,其与机箱固定连接,其输出端固定连接有转动盘;
38.驱动杆,其与转动盘转动连接,另一端转动连接有对称设置的联动杆;
39.驱动块,其一侧转动连接有与联动杆转动连接的驱动轴;
40.工作轴,其位于机箱的外侧,且其与驱动块通过弹簧铰链转动连接;
41.接触块,其固定套接在工作轴的外侧,且其与运输带相配,所述接触块的一侧设置有与驱动块固定连接的限位板;
42.延时杆,其与驱动块固定连接,且其另一端滑动套设有与工作板固定连接随动杆,所述随动杆内固定连接有第二弹簧。
43.作为上述方案的进一步改进,所述运输带内设置有接触槽,所述接触块间接与接触槽接触,所述限位板的一侧固定连接有缓冲板。
44.作为上述方案的进一步改进,所述限定套的两侧均通过弹簧铰链转动连接有对称设置的密封门,所述限定套采用钢化玻璃材质。
45.作为上述方案的进一步改进,所述驱动机构输出端的两侧均设置有与机箱固定连接的稳定板,所述稳定板与运输带相抵压,所述机箱上设置有过个限位弧,所述限位弧的一端连接有与机箱相连接导向条。
46.作为上述方案的进一步改进,所述所述机箱的底部固定连接有收料板,所述收料板上固定连接有缓冲片,所述缓冲片上设置有多个缓冲块。
47.相比现有技术,本发明的有益效果在于:
48.1、通过工作机构和夹具的同步移动,可以进行伴随性的拍摄,保证识别的质量,同时夹具可以适应多种物件的放置,适应不同工作的需要,整体上通过驱动机构使得两个运输带同步运动,可以不间断的进行检测,增加整体的效率,减少其他装置的投入,降低使用成本,同时也较少的人工投入,适应智能制造的过程。
49.2、通过多个装置之间的相互工作,可以很好的进行配合工作,缩小装置的体积,适应生产过程,同时结构简单,易于实现,方便后续的维护和使用。
附图说明
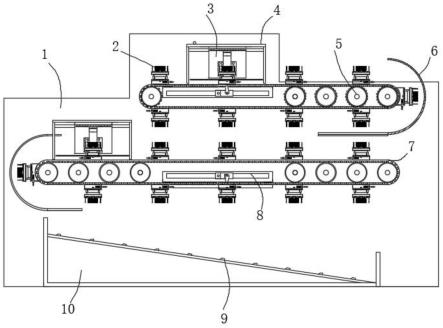
50.图1为本发明的主视剖视示意图;
51.图2为本发明的右视剖视示意图;
52.图3为本发明的局部右视剖视示意图;
53.图4为图3中a处放大的结构示意图;
54.图5为接触器局部主视剖视示意图;
55.图6为夹具主视剖视示意图;
56.图7为夹具右视剖视示意图;
57.图8为图7中b处放大的结构示意图;
58.图9为驱动机构主视剖视示意图;
59.图10为夹具结构示意图。
60.主要符号说明:
61.1、机箱;2、夹具;3、检测机构;4、限定套;5、移动辊;6、限位弧;7、运输带;8、驱动机构;9、缓冲片;10、收料板;11、存储箱;12、输入管; 13、抽水泵;14、输出管;16、密封门;17、稳定板;18、稳定条;19、齿条; 20、功能盒;21、限定筒;22、磁铁;23、调节杆;24、压缩盒;25、滑动槽; 26、放置架;27、滚珠;28、限定板;29、压缩板;210、齿轮;211、安装孔; 212、第一弹簧;213、滑动架;214、接触轮;215、调节套;216、软管;217、滑块;30、工作板;31、摄像头;32、防护罩;33、接触器;34、调节块;35、喷射嘴;36、清理棉;37、微型超声波发生器;38、导向管;81、驱动电机; 82、转动盘;83、联动杆;84、随动杆;85、驱动块;86、驱动杆;87、延时杆;88、第二弹簧;810、驱动轴;811、接触块;812、工作轴;813、限位板; 814。
具体实施方式
62.下面,结合附图以及具体实施方式,对本发明做进一步描述,需要说明的是,在不相冲突的前提下,以下描述的各实施例之间或各技术特征之间可以任意组合形成新的实施例。
63.实施例1:
64.请结合图1-10,本技术实施例中一种基于图像检测的智能制造检测系统的实施原理为:
65.机箱1,其一侧转动连接有多个移动辊5,运输辊5设置有两组,两组移动辊5上连接有相对应的运输带7,机箱1进行必要的防护,同时移动柜5对的运输带7进行必要的支撑和拉紧,保证运输带移动的稳定。
66.夹具2,其连接在运输带7上,夹具2夹持有待检物件,两个运输带7行的夹具2相互对应,夹具2进行物件夹持,保证运输的需要,同时两个运输带7 上的夹具相互配合,使得物件可以进行转移。
67.驱动机构8,其与机箱1相连接,且其输出端驱动两个运输带7同时移动,驱动机构提供基础动力,使得运输带7进行移动。
68.检测机构3,其设置有两个,分别位于两个运输带7的上方,检测机构与机箱1相连接,检测机构3进行必要的检测工作。
69.限定套4,其设置在检测机构3的外侧,且其与机箱1固定连接,限定套4 对检测机构3进行必要防护,同时进行部分光线的遮挡,保证内部光线的稳定。
70.夹具2包括:
71.功能盒20,其底部固定连接有磁铁22,功能盒2进行必要的支撑,同时经过磁铁22吸附,可以与运输带7进行必要的配合,简化安装的过程。
72.安装孔211,其设置在功能盒20上,其内连接有防护机构,安装孔211方便进行防护机构的安装。
73.齿轮210,其设置在功能盒20上,其中间固定连接有功能盒20转动连接的支撑轴,除轮210在后续工作中,可以以支撑轴为中心,进行转动,带动上方的装置进行旋转。
74.调节杆23,其一端与齿轮210固定连接,另一端固定连接有压缩盒24,压缩盒24的顶部设置有多个滑动槽25,调节杆23实现必要的调节,可以使得压缩盒24的位置发生改变,适应工作的需要,滑动槽25适应后续必要的滑动。
75.放置架26,其滑动套设在压缩盒24的顶部,其底端固定连接有与压缩盒 24内壁滑动套接的压缩板29,放置架26实现物件的放置,在重力的作用下,带动压缩板29进行移动,缩小压缩板29与压缩盒24围成空间的体积。
76.软管216,其一端与压缩板29相连接,另一端连接有位于滑动槽25内的调节套215,调节套215的一端与压缩盒24固定连接,另一端连接有与滑动槽25 滑动套接的滑块217,软管的216接收缩小体积溢出的液体,然后进入到调节套 215中,使得调节套215进行延伸,推动滑块217移动。
77.限定板28,其与滑块217固定连接,其一侧滚动镶嵌多过个滚珠27,限定板28伴随着滑块217的移动而移动,进行夹持,滚珠27减少物件与限定板28 之间的摩擦力,方便后续的卸料。
78.防护机构包括:
79.限定筒21,其通过螺栓与功能盒20固定连接,其内部固定连接有第一弹簧 212,限定筒21进行必要的限定,同时经过第一弹簧212进行必要的缓冲。
80.滑动架213,其滑动套设在限定筒21内,其一端与第一弹簧212固定连接,另一端转动连接有接触轮214,滑动架213在限定筒21内滑动,接触轮214可以转动,减少后续接触的摩擦力。
81.检测机构3包括:
82.清理单元,其设置在机箱1内,且其与限定套4相连接,清理单元进行周期性的清理工作。
83.工作板30,其与机箱1滑动套接,其横截面采用l形结构,工作板30进行必要的支
撑,检测机构3整体的伴随移动。
84.防护罩32,设置有两个,且与上方防护罩32与工作板30固定,位于下方的防护罩32与工作板30滑动套接,防护罩32进行必要的防护。
85.摄像头31,其设置有多个,其与防护罩32相连接,摄像头31进行摄像,实现图像的多角度输入。
86.调节块34,其与位于下方的防护罩32固定连接,且其与工作板30通过销钉相对固定,工作板30上设置有容纳调节块34的调节槽,调节块34可以在调节槽的限定下移动,进而对防护罩32的相对位置进行调节,适应工作的需要。
87.稳定条18,其与机箱1固定连接,其另一端滑动套接有齿条19,齿条19 和稳定条18通过销钉相对固定,齿条19可以在稳定条18很滑动,进行调节,齿条与齿轮210在接触后相互啮合,齿条19的限定,使得齿轮210进行转动。
88.清理单元包括:
89.抽水泵13,其固定连接在机箱1的一侧,其输入端连接有输入管12,抽水泵13在存储箱11中抽水,然后经过输出管14输出。
90.存储箱11,其设置在机箱1内,其与输入管12相连通;
91.输出管14,其与抽水泵13的输出端相连接,且其另一端连接有接触器33;
92.其中接触器33包括:
93.导向管38,其为l形管道,且其与输出管14相连通,导向管38与限定套4固定连接,经过输出管14输出的水进入到导向管38中,然后经过喷射嘴35 雾化喷出,其中水可以为带有清洁作用的洗涤剂。
94.喷射嘴35,其设置在导向管38的一侧,其两侧设置有与导向管38固定粘接的清理棉36,清理棉36将多余的水渍去除。
95.微型超声波发生器37,其固定在导向管38内,且其设置有多个,微型超声波发生器37进行工作,产生震荡,增加清洁的效果。
96.驱动机构8包括:
97.驱动电机81,其与机箱1固定连接,其输出端固定连接有转动盘82,通过驱动电机81进行带动,使得转动盘82进行便要转动。
98.驱动杆86,其与转动盘82转动连接,另一端转动连接有对称设置的联动杆 83,在转动盘82转动的过程中,带动联动杆83移动和转动,进一步的带动驱动块85进行移动。
99.驱动块85,其一侧转动连接有与联动杆83转动连接的驱动轴810;
100.工作轴812,其位于机箱1的外侧,且其与驱动块85通过弹簧铰链转动连接。
101.接触块811,其固定套接在工作轴812的外侧,且其与运输带7相配,接触块811的一侧设置有与驱动块85固定连接的限位板813,接触块811在向一侧移动时,对运输带7不起作用,在向另一侧移动后,由于限位板813限定,卡在运输带7内,在驱动块85移动时,推动运输带7移动,实现传送。
102.延时杆87,其与驱动块85固定连接,且其另一端滑动套设有与工作板30 固定连接随动杆84,随动杆84内固定连接有第二弹簧88,在驱动块85移动的过程中,带动延时杆87进行移动,延时杆87首先在随动杆84中空载移动一端距离,然后接触到第二弹簧88,经过传递,使得随动杆84移动,进一步的带动工作板30进行移动,伴随夹具2进行物件的检查。
103.运输带7内设置有接触槽,接触块811间接与接触槽接触,限位板813的一侧固定连接有缓冲板,接触槽与接触块811相互配合,实现稳定的工作,同时经过缓冲板的缓冲,减少工作时的震动。
104.限定套4的两侧均通过弹簧铰链转动连接有对称设置的密封门16,限定套 4采用钢化玻璃材质,密封门16进行必要的密封,同时密封门16与接触轮214 接触,实现开启,减少冲击。
105.驱动机构8输出端的两侧均设置有与机箱1固定连接的稳定板17,稳定板 17与运输带7相抵压,机箱1上设置有过个限位弧6,限位弧6的一端连接有与机箱1相连接导向条,稳定板17进行必要的支撑,保证运输带7运输的稳定,同时限位弧6保证在圆弧转角时,对物件的限定,避免其掉落,限位弧6上设置有减少摩擦的钢珠或者辊。
106.机箱1的底部固定连接有收料板10,收料板10上固定连接有缓冲片9,缓冲片9上设置有多个缓冲块,物件最后经过重力的作用,掉落到缓冲片9上,然后到达收料板10的底部,实现收料。
107.在进行工作时,经过外界的放置,使得物件放置到夹具2上,经过重力的作用,使得放置架26下降,进一步的带动压缩板29下降,液体经过压缩板216 进入到滑动槽25中,带动滑块217进行移动,进一步的推动限定板28移动,对物件进行夹持,然后经过驱动电机81的工作,带动转动盘82转动,进一步的经过驱动杆86和联动杆83的带动,使得驱动块85移动,在移动过程中,带动延时杆87首先空载一段距离,然后经过第二弹簧88接触到随动杆84,带动随动杆84以及随动杆84上的工作板30移动,并在此同时,驱动块85的顺向移动,使得接触块811推动运输带7进行移动,进而带动夹具2以及物料移动,此时工作板30伴随着夹具2同步移动,进行一定时间的同步拍摄,同时齿轮210 与齿条19接触,使得齿轮210转动,进一步的带动整个夹具2移动,进行周边的检测,在检测完上半部分后,伴随着夹具2的移动,到达限位弧6处,在限位弧6的限定下以及圆周的转动下,实现翻转,同时位于下方运输带7上的夹具2移动到限位弧6的下方,在限定下,物件转换方向,掉落到下方的夹具2 内,上下两个夹具2同步移动一定距离后,上方的夹具2继续翻转,进入后期的循环,下方的夹具2进入到下方的检测机构3中,进行再次的检测,使得物件整体均可以被检测到,最后经过重力的作用的,掉落到缓冲片9上,缓冲后进入到收料板10的底部,实现收集。
108.上述实施方式仅为本发明的优选实施方式,不能以此来限定本发明保护的范围,本领域的技术人员在本发明的基础上所做的任何非实质性的变化及替换均属于本发明所要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1