一种用于预防叉车碰撞的装置的制作方法
本发明涉及叉车安全驾驶,特别涉及一种用于预防叉车碰撞的装置。
背景技术:
1、叉车是指对成件托盘货物进行装卸、堆垛和短距离运输作业的各种轮式搬运车辆,用额定起重量、载荷中心距、门架倾角等技术参数来表明叉车的结构特征和工作性能。
2、叉车的工作环境复杂,区域狭小,并且其工作区域内还有各种设备,工作人员作业,因此当叉车操作人员不注意时,很容易发生碰撞,导致设备损坏,人员发生危险。
3、因此,设计叉车防撞系统,确保叉车在发生碰撞前限制其行驶速度,也可切断叉车行驶功能,有效预防发生危险。
技术实现思路
1、本发明的主要目的在于提供一种用于预防叉车碰撞的装置,可以有效解决背景技术中的问题。
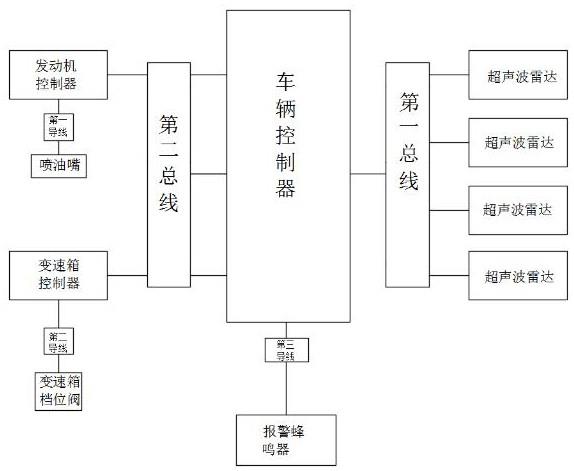
2、为实现上述目的,本发明采取的技术方案为:一种用于预防叉车碰撞的装置,包括设置在叉车上的防撞装置以及用于控制防撞装置的控制系统,所述防撞装置包括超声波雷达、第一总线、车辆控制器、第二总线、发动机控制器、第一导线、喷油嘴、变速箱控制器、第二导线、变速箱档位阀、第三导线、蜂鸣器,所述超声波雷达的个数为四个,四个所述超声波雷达分别安装在叉车前,后,左,右四个方位,四个所述超声波雷达分别通过第一总线与车辆控制器电性连接,所述车辆控制器通过第二总线与所述发动机控制器电性连接,所述发动机控制器通过第一导线与所述喷油嘴电性连接,所述发动机控制器通过所述喷油嘴控制发动机转速,所述车辆控制器通过第二总线与变速箱控制器电性连接,所述变速箱控制器通过第二导线与所述变速箱档位阀电性连接,所述车辆控制器通过第三导线与蜂鸣器电性连接;所述车辆控制器采用整车控制器vcu,所述车辆控制器接收到超声波雷达传输的数据之后,通过设定程序,判断是否发出报警,限制车速以及切断叉车行驶动力等;
3、所述控制系统包括采集模块、处理模块以及预警模块,所述采集模块通过四个所述超声波雷达测量叉车四周距离障碍物的距离,角度以及相对于叉车的速度,将测量结果发送至处理模块,所述处理模块获取障碍物距离数据,角度数据以及相对于叉车的速度,计算发生碰撞的时间t,所述处理模块设定设定时间参数t,当t≤t时,所述处理模块发出预警信号,所述预警模块发出预警操作。根据不同的车型、场景可设置不同的时间参数t。
4、其中,所述超声波雷达在检测当前范围内是否存在障碍物时,若存在障碍物,所述超声波雷达会获取目标id、目标纵向距离lz、目标横向距离lh、目标纵向速度vz、目标横向速度数据vh,并将这些数据通过第一总线通信传递给所述车辆控制器。
5、其中,所述车辆控制器根据目标纵向距离lz、目标横向距离lh、目标纵向速度vz、目标横向速度数据vh数据,计算出车辆周围障碍物距离、障碍物角度以及障碍物相对速度,所述障碍物距离d=sqrt(lz2+lh2),所述障碍物角度:
6、tanθ= lh /lz,θ= arctan(lh /lz),障碍物相对速度:v =vh ×cosθ+ vz×sinθ,根据所述障碍物距离以及所述障碍物相对速度,即可得出碰撞时间t:t = d/ v。通过超声波雷达监测,可以得到关键数据,精度高。控制器可以实现复杂逻辑控制,且方便调整防撞策略和相关参数。
7、其中,四个所述超声波雷达分别安装于叉车货叉底部,叉车左侧上车踏板下方,叉车右侧上车踏板下方以及叉车配重中间。
8、优选地,所述第一总线以及所述第二总线均为can总线,can总线是汽车行业以及重工机械行业标准化通信协议总线。
9、优选地,所述车辆控制器具备多个can输入口以及数字量、模拟量输入/输出端口,可应用于多种叉车车型,分别实现总线控制,数字控制,模拟控制。
10、优选地,所述预警模块获取预警信号后发出预警操作,所诉控制器根据障碍物距离线性削减发动机油门信号,确保车辆离故障物越近,油门开度越小,从而限制车速,同时控制蜂鸣器工作,蜂鸣器主要用于发送提示音。
11、优选地,所述发动机控制器采用总线油门tsc控制方式,所述变速箱控制器采用总线控制方式控制变速箱档位。
12、与现有技术相比,本发明具有如下有益效果:
13、本发明中,通过装在叉车四周的超声波雷达实时检测车辆周围的障碍物,测量出障碍物的数据,通过总线传输至车辆控制器,车辆控制器通过程序判断是否需要进行报警,或者切断叉车行驶动力。如判断为不需要报警或者切断叉车行驶动力,则车辆按正常模式运行;如判断为需要报警或者切断叉车行驶动力,则车辆控制器输出系统电压,驱动蜂鸣器工作;车辆控制器的总线发送数据0,使发动机怠速;车辆控制器发送空档命令,使变速箱切换为空档,切断动力输出。从而使叉车减速或者停止,避免碰撞事故发生。
14、本发明通过软件时间参数设定,能够调整控制器执行防碰撞保护的临界点。
技术特征:
1.一种用于预防叉车碰撞的装置,其特征在于:包括设置在叉车上的防撞装置以及用于控制防撞装置的控制系统,所述防撞装置包括超声波雷达(1)、第一总线(2)、车辆控制器(3)、第二总线(4)、发动机控制器(5)、第一导线(6)、喷油嘴(7)、变速箱控制器(8)、第二导线(9)、变速箱档位阀(10)、第三导线(11)、蜂鸣器(12),所述超声波雷达(1)的个数为四个,四个所述超声波雷达(1)分别安装在叉车前,后,左,右四个方位,四个所述超声波雷达(1)分别通过第一总线(2)与车辆控制器(3)电性连接,所述车辆控制器(3)通过第二总线(4)与所述发动机控制器(5)电性连接,所述发动机控制器(5)通过第一导线(6)与所述喷油嘴(7)电性连接,所述发动机控制器(5)通过所述喷油嘴(7)控制发动机转速,所述车辆控制器(3)通过第二总线(4)与变速箱控制器(8)电性连接,所述变速箱控制器(8)通过第二导线(9)与所述变速箱档位阀(10)电性连接,所述车辆控制器(3)通过第三导线(11)与蜂鸣器(12)电性连接;
2.根据权利要求1所述的一种用于预防叉车碰撞的装置,其特征在于:所述超声波雷达(1)在检测当前范围内是否存在障碍物,若存在障碍物,所述超声波雷达(1)会获取目标id、目标纵向距离lz、目标横向距离lh、目标纵向相对速度vz、目标横向相对速度数据vh,并将这些数据通过第一总线(2)通信传递给所述车辆控制器(3)。
3.根据权利要求2所述的一种用于预防叉车碰撞的装置,其特征在于:所述车辆控制器(3)根据目标纵向距离lz、目标横向距离lh、目标纵向相对速度vz、目标横向相对速度数据vh数据,计算出车辆周围障碍物距离、障碍物方位以及障碍物相对速度,所述障碍物距离:d=sqrt(lz2+lh2),所述障碍物角度:tanθ= lh /lz,θ= arctan(lh /lz),障碍物相对速度:v=vh ×cosθ+ vz×sinθ,根据所述障碍物距离以及所述障碍物相对叉车的速度,即可得出碰撞预判t:t = d/ v。
4.根据权利要求3所述的一种用于预防叉车碰撞的装置,其特征在于:四个所述超声波雷达(1)分别安装于叉车货叉底部,叉车左侧上车踏板下方,叉车右侧上车踏板下方以及叉车配重中间。
5.根据权利要求4所述的一种用于预防叉车碰撞的装置,其特征在于:所述第一总线(2)以及所述第二总线(4)均为can总线。
6.根据权利要求5所述的一种用于预防叉车碰撞的装置,其特征在于:所述车辆控制器(3)具备多个can输入口、数字量以及模拟量输入/输出端口,可应用于多种叉车车型,分别实现总线控制,数字控制,模拟控制。
7.根据权利要求6所述的一种用于预防叉车碰撞的装置,其特征在于:所述车辆控制器(3),可根据障碍物距离线性削减发动机油门比例,确保车辆离故障物越近,油门开度越小,同时控制蜂鸣器(12)工作。
8.根据权利要求7所述的一种用于预防叉车碰撞的装置,其特征在于:所述发动机控制器(5)采用总线油门tsc1控制方式,所述变速箱控制器(8)采用总线控制方式控制变速箱档位。
技术总结
本发明公开了一种用于预防叉车碰撞的装置,涉及叉车安全驾驶技术领域,本发明包括设置在叉车上的防撞装置以及用于控制防撞装置的控制系统,所述防撞装置包括超声波雷达、第一总线、车辆控制器、第二总线、发动机控制器、第一导线、喷油嘴、变速箱控制器、第二导线、变速箱档位阀、第三导线、蜂鸣器,所述超声波雷达的个数为四个,四个所述超声波雷达分别安装在叉车前,后,左,右四个方位,四个所述超声波雷达分别通过第一总线与车辆控制器电性连接,所述控制系统包括采集模块、处理模块以及预警模块。本发明为一种用于预防叉车碰撞的装置,使用效果好。
技术研发人员:徐杰,王年财,朱聚滨
受保护的技术使用者:杭州临安国森机械科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!