电力设备吊装方法、装置、设备、存储介质和程序产品与流程
本技术涉及电力设备高空吊装,特别是涉及一种电力设备吊装方法、装置、计算机设备、存储介质和计算机程序产品。
背景技术:
1、随着电力设备高空吊装技术的发展,出现了基于输电线路的电力设备高空吊装技术,该技术通过工作人员固定在高空输电线路上,再将电力设备用绳索吊装到高空输电线路上。
2、上述技术方案需要工作人员手动将电力设备吊装到高空输电线路上,通常是需要工作人员移动到输电线路预定位置,然后将电力设备吊装到该位置,这样会导致吊装过程耗费大量时间,吊装效率低下。
3、例如,输电线路悬垂倒v绝缘子串吊装更换和安装作业方法异于常规的悬垂串的更换工作,其更换作业难度、精准度要求比较高。输电线路悬垂倒v绝缘子串使用常规吊装更换方法时其效率低、高空作业人员劳动强度大、作业步骤繁琐。为了简化吊装更换倒v悬垂绝缘子串的操作流程,减轻作业强度、难度,本发明专利通过对传递物体力学计算,选用适合的滑轮,计算单根输电线路张力是否满足第一滑轮所承受的水平拉力。一种针对更换输电线路倒v串悬垂整串绝缘子轻量化作业方法,是使用特制轻量化机动电机作为动力牵引,迪尼玛绳索作为总牵引绳和吊装使用,传递限位装置第一滑轮实现定点吊装工作。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够高效率吊装电力设备的电力设备吊装方法、装置、计算机设备、计算机可读存储介质和计算机程序产品。
2、第一方面,本技术提供了一种电力设备吊装方法。所述方法包括:
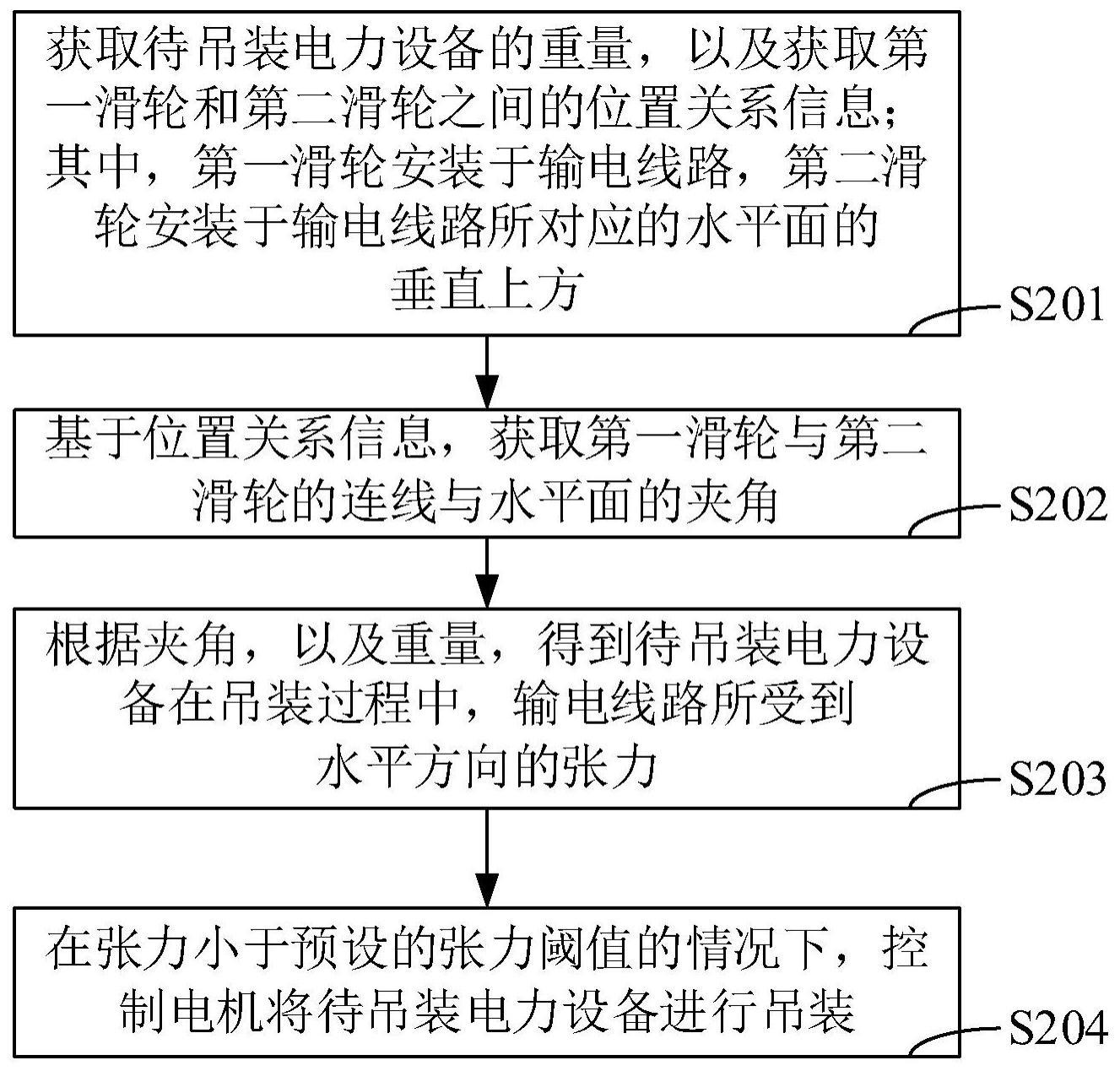
3、获取待吊装电力设备的重量,以及获取第一滑轮和第二滑轮之间的位置关系信息;其中,所述第一滑轮安装于输电线路,所述第二滑轮安装于所述输电线路所对应的水平面的垂直上方;
4、基于所述位置关系信息,获取所述第一滑轮与所述第二滑轮的连线与所述水平面的夹角;
5、根据所述夹角,以及所述重量,得到所述待吊装电力设备在吊装过程中,所述输电线路所受到水平方向的张力;
6、在所述张力小于预设的张力阈值的情况下,控制电机将所述待吊装电力设备进行吊装。
7、在其中一个实施例中,所述获取第一滑轮和第二滑轮之间的位置关系信息,包括:在预设的坐标系中,获取所述第一滑轮的第一位置坐标,以及获取所述第二滑轮的第二位置坐标;基于所述第一位置坐标以及所述第二位置坐标,得到所述第一滑轮和所述第二滑轮之间的位置关系信息。
8、在其中一个实施例中,所述基于所述位置关系信息,获取所述第一滑轮与所述第二滑轮的连线与所述水平面的夹角,包括:基于所述第一滑轮和所述第二滑轮之间的位置关系信息,得到在所述预设坐标系中,所述第一滑轮与所述第二滑轮的连线的位置信息;基于所述位置信息,得到所述第一滑轮与所述第二滑轮的连线与所述水平面的夹角。
9、在其中一个实施例中,所述根据所述夹角,以及所述重量,得到所述待吊装电力设备在吊装过程中,所述输电线路所受到水平方向的张力,包括:基于所述待吊装电力设备的重量,得到所述待吊装电力设备所产生的重力;基于所述夹角以及所述重力,得到所述待吊装电力设备在吊装过程中,所述输电线路所受到水平方向的张力。
10、在其中一个实施例中,所述方法还包括:在所述张力大于或等于所述张力阈值的情况下,控制电机保持静止状态,并产生安全警告信息。
11、在其中一个实施例中,所述方法还包括:获取所述输电线路对应的水平应力,以及获取所述输电线路对应的横截面积;基于所述水平应力以及所述横截面积,得到所述张力阈值。
12、第二方面,本技术还提供了一种电力设备吊装装置。所述装置包括:
13、信息获取模块,用于获取待吊装电力设备的重量,以及获取第一滑轮和第二滑轮之间的位置关系信息;其中,所述第一滑轮安装于输电线路,所述第二滑轮安装于所述输电线路所对应的水平面的垂直上方;
14、夹角获取模块,用于基于所述位置关系信息,获取所述第一滑轮与所述第二滑轮的连线与所述水平面的夹角;
15、张力获取模块,用于根据所述夹角,以及所述重量,得到所述待吊装电力设备在吊装过程中,所述输电线路所受到水平方向的张力;
16、设备吊装模块,在所述张力小于预设的张力阈值的情况下,控制电机将所述待吊装电力设备进行吊装。
17、第三方面,本技术还提供了一种计算机设备。所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
18、获取待吊装电力设备的重量,以及获取第一滑轮和第二滑轮之间的位置关系信息;其中,所述第一滑轮安装于输电线路,所述第二滑轮安装于所述输电线路所对应的水平面的垂直上方;
19、基于所述位置关系信息,获取所述第一滑轮与所述第二滑轮的连线与所述水平面的夹角;
20、根据所述夹角,以及所述重量,得到所述待吊装电力设备在吊装过程中,所述输电线路所受到水平方向的张力;
21、在所述张力小于预设的张力阈值的情况下,控制电机将所述待吊装电力设备进行吊装。
22、第四方面,本技术还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
23、获取待吊装电力设备的重量,以及获取第一滑轮和第二滑轮之间的位置关系信息;其中,所述第一滑轮安装于输电线路,所述第二滑轮安装于所述输电线路所对应的水平面的垂直上方;
24、基于所述位置关系信息,获取所述第一滑轮与所述第二滑轮的连线与所述水平面的夹角;
25、根据所述夹角,以及所述重量,得到所述待吊装电力设备在吊装过程中,所述输电线路所受到水平方向的张力;
26、在所述张力小于预设的张力阈值的情况下,控制电机将所述待吊装电力设备进行吊装。
27、第五方面,本技术还提供了一种计算机程序产品。所述计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现以下步骤:
28、获取待吊装电力设备的重量,以及获取第一滑轮和第二滑轮之间的位置关系信息;其中,所述第一滑轮安装于输电线路,所述第二滑轮安装于所述输电线路所对应的水平面的垂直上方;
29、基于所述位置关系信息,获取所述第一滑轮与所述第二滑轮的连线与所述水平面的夹角;
30、根据所述夹角,以及所述重量,得到所述待吊装电力设备在吊装过程中,所述输电线路所受到水平方向的张力;
31、在所述张力小于预设的张力阈值的情况下,控制电机将所述待吊装电力设备进行吊装。
32、上述电力设备吊装方法、装置、计算机设备、存储介质和计算机程序产品,通过获取待吊装电力设备的重量,以及获取第一滑轮和第二滑轮之间的位置关系信息;其中,第一滑轮安装于输电线路,第二滑轮安装于输电线路所对应的水平面的垂直上方;基于位置关系信息,获取第一滑轮与第二滑轮的连线与水平面的夹角;根据夹角,以及重量,得到待吊装电力设备在吊装过程中,输电线路所受到水平方向的张力;在张力小于预设的张力阈值的情况下,控制电机将待吊装电力设备进行吊装。本技术通过将可以移动的第一滑轮安装于输电线路上,再将不可移动的第二滑轮安装于输电线路所对应的水平面的垂直上方,然后基于上述两个滑轮的位置关系信息以及待吊装电力设备的重量,得到输电线路所受到水平方向的张力,在该张力小于预设的张力阈值的情况下,通过电机吊装电力设备,能够高效地对电力设备进行吊装。
- 还没有人留言评论。精彩留言会获得点赞!