双极板及膜电极上下料机构及其控制方法与流程
本发明的实施例涉及一种应用于燃料电池的上下料机构及其控制方法,特别涉及一种双极板及膜电极上下料机构及其控制方法。
背景技术:
1、在氢燃料电池电堆堆叠的生产线中,需要人工先将料仓装满,然后机械手对双极板/膜电极读码抓取,放到压机中堆叠。读码失败的需要放到不合格品料仓。
2、目前上料装置的料仓是和压机组合在一起的,每次放一定数量产品,等取完料仓所有物料之后,停机才能进行下次放料。而且料仓里的双极板/膜电极是从上一个物料盒中取出的,属于二次取料,取料过程难免会有不必要的损伤,增加了物料的成本。停机放料、二次放料既大大增加了燃料电池堆叠的时间,使得生产效率不高;同时也增加了人工的成本,且会有不必要的物料损伤,增加物料的原料费。
3、上料装置的料仓不可拆卸性,使得本设备只能匹配单一规格形状的双极板/膜电极。若改制产品,则需要拆卸更好料仓的部分结构,增加了更改设备的费用,且更换之后仍需要调机,既增加了成本,也会延迟工期。
技术实现思路
1、本发明的实施方式的目的在于提供一种可以改变现有的双极板/膜电极送料方式,同时能够减少送料成本,提高生产效率的双极板及膜电极上下料机构及其控制方法。
2、为了实现上述目的,本发明的实施方式设计了一种双极板及膜电极上下料机构,包括:
3、输送结构;在所述的双极板及膜电极上下料机构的下方设置所述的输送结构;
4、推杆机构,在所述的输送结构的一端所述推杆机构;
5、物料暂存结构,在所述的输送结构的上方设置所述的物料暂存结构;
6、取料结构,在所述的输送结构的上方,在所述的物料暂存结构的一侧,在所述的推杆机构的运动范围内设置所述的取料结构;
7、顶升结构,在所述的取料结构的下方设置所述的顶升结构;
8、双极板或膜电极,在所述的物料暂存结构和所述的取料结构上方设置所述的双极板或膜电极;
9、所述的双极板或膜电极通过所述的输送结构输送到所述的物料暂存结构;所述的双极板或膜电极在所述的推杆机构的驱动下,从所述的物料暂存结构输送至所述的取料结构。
10、进一步,在所述取料结构的一侧,在所述的输送结构的一侧设置一不良物暂存结构。
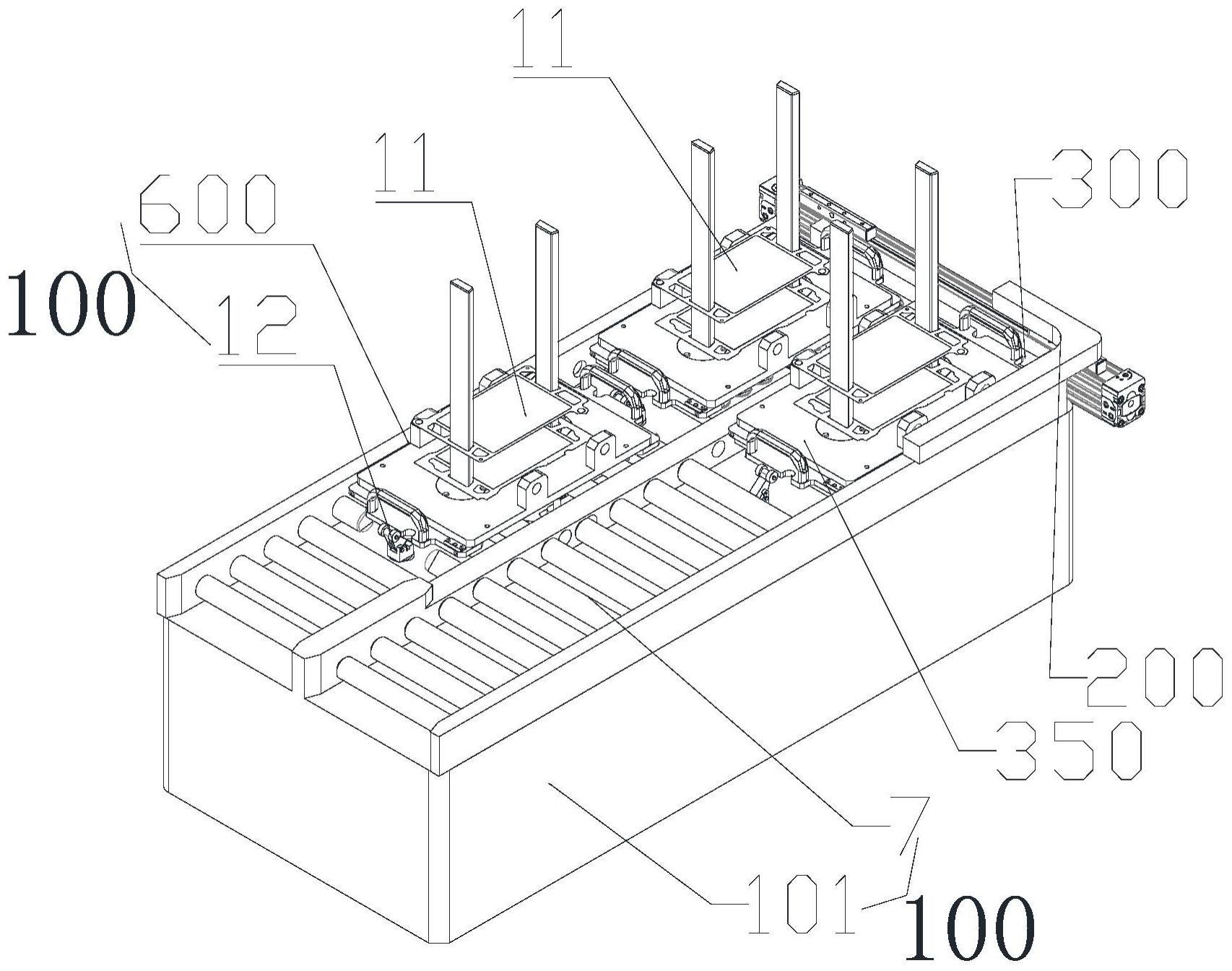
11、进一步,所述的输送结构,还包括:
12、输送底座,在所述的输送结构的下方设置所述的输送底座;
13、输送滚筒,在所述的输送底座上设置所述的输送滚筒;所述的输送滚筒通过链传动形成所述的输送滚筒并排滚动;在一侧所述的输送滚筒的一端设置所述的物料暂存结构;在另一侧所述的输送滚筒的一端设置所述的取料结构和不良物暂存结构;两侧所述的输送滚筒滚动方向相反;在所述的物料暂存结构和所述的不良物暂存结构的同侧,在所述输送底座上固定气动挡停机构。
14、所述的输送滚筒由设置在所述的输送底座内的驱动装置进行驱动。
15、进一步,所述的推杆机构,还包括:
16、无杆气缸,在所述输送结构的输送底座的一侧的边缘上固定所述的无杆气缸的缸体;
17、移动挡块,在所述的无杆气缸的运动块上固定所述的移动挡块;
18、定位销,在所述的移动挡块的侧面固定所述的定位销。
19、进一步,所述的物料暂存结构,还包括:
20、第一转向机构,在所述的输送结构的输送底座的一侧的上方固定所述的第一转向机构;
21、物料暂存架,在所述的第一转向机构上放置所述的物料暂存架。
22、进一步,所述的第一转向机构,还包括:
23、第一工装板,在所述的输送底座上方固定所述的第一工装板;
24、滚轮,在所述的第一工装板的上方设置若干个所述的滚轮;所述的滚轮可沿着任意方向移动;
25、所述的物料暂存架,还包括:
26、托盘,在所述的物料暂存架的底部设置所述的托盘;
27、料仓底板,在所述的托盘上固定所述的料仓底板;
28、立柱导向座,在所述的料仓底板上固定若干根所述的立柱导向座;
29、定位立柱,在所述的立柱导向座内穿入所述的定位立柱;所述的定位立柱通过所述的立柱导向座固定在所述的料仓底板和所述的托盘之间;
30、把手,在所述的托盘的前后两端上固定所述的把手;
31、定位耳板,在所述的料仓底板的左右两侧设置所述的定位耳板;
32、定位孔,在所述的定位耳板上开设所述的定位孔;在所述的推杆机构移动时,在所述的定位孔内在插入所述的推杆机构上的定位销,进行所述的物料暂存架的定位;
33、顶升机构连接块,在所述的托盘的上方,在所述的料仓底板的下方固定所述的顶升机构连接块;所述的顶升机构连接块嵌入开设在所述托盘上的凹孔中;在所述顶升机构连接块的中心开设中心孔,所述中心孔用于定位整个物料暂存架。
34、进一步,所述的取料结构,还包括:
35、第二转向机构,在所述的第一转向机构的一侧的上方固定所述的第一转向机构;
36、在所述的第二转向机构上设置物料暂存架;在所述的第二转向机构的下方设置所述的顶升结构。
37、进一步,所述的第二转向机构,还包括:
38、第二工装板,在所述输送结构的输送底座上方固定所述的第二工装板;在所述的第二工装板中间开设一方孔;在所述的方孔的两侧,在所述的第二工装板上开设两个凹孔;在所述的凹孔中放置所述顶升结构的导向轴。
39、同样,在所述的第二工装板的上方设置若干个滚轮。
40、进一步,所述的顶升结构,还包括:
41、步进电机,在所述的输送结构的输送底座上固定所述的步进电机的外壳;
42、丝杆,在所述的步进电机上活动连接所述的丝杆;所述的步进电机驱动所述的丝杆进行升降;所述的丝杆一端伸入到所述的物料暂存架的顶升机构连接块的中心孔中;
43、电机安装板,在所述的丝杆上活动连接所述的电机安装板,所述的丝杆带动所述的电机安装板进行升降;
44、导向轴,在所述的电机安装板的两端固定所述的导向轴;所述的导向轴的一端伸入到第二工装板上开设两个凹孔。
45、在本发明中还提供了一种双极板及膜电极上下料机构的控制方法,包括以下的步骤:
46、步骤s10:料仓装满,在物料暂存架堆叠若干层的双极板或膜电极,直至物料暂存架的最高处,进入步骤s20;
47、步骤s20:上料,将装满双极板或膜电极的物料暂存架放到输送底座上,通过所述的输送底座内的驱动装置进行驱动;将所述物料暂存架输送至物料暂存位;进入步骤s30;
48、步骤s30:送料,推杆机构的移动挡块通过无杆气缸的推动将步骤s20中的物料暂存架输送至取料结构,并通过顶升结构的导向轴和丝杆的一端进行定位;进入步骤s40;
49、步骤s40:顶升结构顶升物料暂存架;所述的顶升结构的步进电机驱动丝杆上升,按照每次需要上升的距离顶升物料暂存架;进入步骤s50;
50、步骤s50:机器人取料,机器人通过夹具对所述物料暂存架上的双极板或膜电极进行检验,如果双极板或膜电极合格,所述的机器人进行取料;并进入步骤s40;如果不合格,则进入步骤s60;
51、步骤s60:不良物暂存结构缓存不合格的双极板或膜电极,所述的机器人将不合格的双极板或膜电极放入不良物暂存结构处的物料暂存架上,直至所述物料暂存架上的双极板或膜电极取完,将不良物暂存结构处的物料暂存架和取料结构处的物料暂存架通过所述的输送底座内的驱动装置进行下线。
52、本发明的实施方式同现有技术相比,采用了在双极板及膜电极上下料机构的下方设置输送结构;在输送结构的一端推杆机构;在输送结构的上方设置物料暂存结构;在输送结构的上方,在物料暂存结构的一侧,在推杆机构的运动范围内设置取料结构;在取料结构的下方设置顶升结构;在物料暂存结构和取料结构上方设置双极板或膜电极;双极板或膜电极通过输送结构输送到物料暂存结构;双极板或膜电极料仓在推杆机构的驱动下,从物料暂存结构输送至取料结构。
53、解决了现有技术中的二次取料和上料装置的料仓不可拆卸性的技术问题,以及二次取料取料过程中因取料损坏,增加了物料的成本以及生产效率不高的技术问题。
- 还没有人留言评论。精彩留言会获得点赞!