一种ROV释放回收的半主动升沉补偿装置
一种rov释放回收的半主动升沉补偿装置
技术领域
1.本发明属于海洋工程技术及装备领域,具体涉及一种rov释放回收的半主动升沉补偿装置。
背景技术:
2.遥控水下机器人,是人类探索、开发海洋的重要工具之一,可以在深海中进行长时间的作业,安全、经济、高效的完成深海观察、地质调查、打捞等作业任务。因此伴随着海洋资源的不断开发深入,rov已然成为人类开发利用海洋资源不可或缺的重要工具。rov虽然具有很出色的作业能力,但其作业能力很大程度上受到作业海况的限制,而限制的主要方面在于rov的下水与回收。故对rov收放系统的研究成为关乎rov发展未来的重要课题,其中rov收放系统在恶劣海况下的升沉补偿技术也成为研究的重中之重。
3.申请号202010433766.4的中国专利文件(申请日:2020年5月21日)中公开的“一种分布式节能型主被动复合升沉补偿系统及其工作方法”,提供了一种分布式节能型主被动复合升沉补偿系统及其工作方法。虽然与本专利属于同一技术领域,但两者之间存在显著不同。
4.现有的rov升沉补偿装置主要包括主动、被动以及主被动相结合三种方式,其中被动升沉补偿装置结构简单但精度较低、补偿效率不高,较难适应复杂的海况环境。主动升沉补偿装置具有精度高、补偿效率高的优点但造价高昂,结构复杂。综上,本发明采用主被动相结合的方式,结合主动与被动的相关优点,设计一种rov释放回收的半主动升沉补偿装置以达到补偿精度与补偿效率问题。同时,针对rov释放回收时受限于海况环境的问题,本发明加入基于张力运动切换控制器用于在不同层级海况的工作环境下运用半主动升沉补偿装置进行主被动作业方式的切换,从而提高装置的工作效率,达到优化结构、降低成本、降低能耗、增加通用性的目的。
技术实现要素:
5.本发明的目的在于一种rov释放回收的半主动升沉补偿装置。
6.本发明的目的通过如下技术方案来实现:
7.一种rov释放回收的半主动升沉补偿装置,包括主动补偿单元、气-液弹性储能被动补偿单元、基于张力运动切换控制器单元、张力传感器a、张力传感器b、储缆绞车、收放支撑架及作业rov;
8.所述基于张力运动切换控制器单元放置位于主动单元与气-液弹性储能被动补偿单元之间,包括非奇异滑模控制器,通过事件驱动的切换律进行主被动补偿在不同等级海况下的切换;
9.所述储缆绞车固定在船板上,储缆绞车连接缆绳的一端,缆绳的另一端依次连接主动补偿单元、张力传感器a、气-液弹性储能被动补偿单元、张力传感器b、收放支撑架、作业rov。
10.进一步地,所述主动补偿单元包括两个主动补偿补偿缸、电液伺服阀、压力表、过滤器、变量泵、截止阀、油缸、溢流阀及dsp控制器;每个主动补偿液压缸内设置一个活塞杆,活塞杆的上方连接一个主动补偿单元滑轮,主动补偿单元滑轮上连接缆绳,活塞杆的两侧安装位移传感器、压力传感器及速度传感器;两个主动补偿液压缸的无杆腔依次与电液伺服阀、压力表、过滤器、变量泵、截止阀以及油缸相连,过滤器和变量泵上并联有溢流阀;dsp控制器控制电液伺服阀。
11.进一步地,所述主动补偿液压缸3为非对称双作用液压缸。
12.进一步地,所述主动补偿单元的电液伺服阀串联于截止阀和单向阀之间,单向阀与主动补偿蓄能器相连;变量泵上并联有溢流阀,变量泵依次连接电动机和转速传感器,电动机连接有蓄电池组,变量泵还连接有角度传感器;压力传感器、位移传感器、速度传感器、角度传感器、转速传感器、电液伺服阀均与dsp控制器连接。
13.进一步地,所述气-液弹性储能被动补偿单元包括:两组被动补偿气瓶组、两个被动补偿液压缸、被动补偿单元导轮、框架支座及气瓶支撑板;两个被动补偿液压缸位于中间位置两侧对称放置被动补偿气瓶组,并以串联的方式相连;每组被动补偿气瓶组均包括两个蓄能气瓶、两个蓄气气瓶、一个被动补偿蓄能器,并以串联的方式相连;被动补偿单元导轮包括一个定滑轮和一个动滑轮,之间通过缆绳连接,被动补偿单元导轮竖直放置在框架支座上,在被动补偿单元导轮两侧各连接一个连接器,将两个被动补偿液压缸对称放置在被动补偿单元导轮两侧,被动补偿液压缸的输出端口与连接器相连;蓄能气瓶、蓄气气瓶及被动补偿蓄能器均放置在气瓶支撑板上。
14.进一步地,被动补偿蓄能器的一端通过被动补偿液阀与被动补偿液压缸的输入口相连接,另一端通过蓄能气瓶气阀和蓄气气瓶气阀分别与对应的蓄能气瓶和蓄气气瓶的过气端口相连,同时被动补偿蓄能器还与外部油路相连。
15.进一步地,所述基于张力运动切换控制器单元包括非奇异终端滑模控制器,并以非奇异终端滑模控制器为基础控制器;通过张力传感器检测收放作业时缆绳上的实时张力,基于切换信号本身的过去值和整体系统的状态进行主被动补偿方式的切换;非奇异终端滑模控制中二阶不确定性的非线性有干扰的状态方程为:
[0016][0017][0018]
其中,x=[x1,x2]
t
,f(x),b(x)为已知的系统状态非线性函数矩阵,b(x)≠0,g(x)为不确定性的外部干扰和系统模型且g(x)≤lg,u为系统控制输入向量。当收放作业开始时,需要给出张力期望x3,利用经过张力传感器检测的实时张力x,定义误差e,则:
[0019]
e=x
3-x
[0020]
非奇异滑模控制面为:
[0021][0022]
式中,β》0,p》q》0,p和q为正奇数;则二阶段状态方程非奇异终端滑模控制器为:
[0023]
[0024]
所述切换信号依赖其本身的过去值以及系统的状态,即以张力传感器检测的实时张力为数据;’换信号采取事件驱动的切换律:
[0025]
σ(t
+
)=s(σ(t-),x(t))
[0026]
式中,σ为切换信号,σ(t-)为切换信号本身的过去值,x(t)为系统的状态。
[0027]
本发明的有益效果在于:
[0028]
本发明采用主被动相结合方式,基于rov工作时海况环境的优劣等级能够通过装置中的基于张力运动切换控制根据缆绳上的实时张力来进行主被动补偿作业方式的切换,通过在高等级海况下运用主动补偿方式经由主动控制调节主动补偿缸中的电液伺服阀以及在低等级海况环境下运用气-液弹性储能被动补偿方式保证rov收放过程中的稳定性和补偿精度,从而达到精确控制rov收放,保护rov本体。本发明具有提高作业效率、降低能耗、增加通用性等优点。
附图说明
[0029]
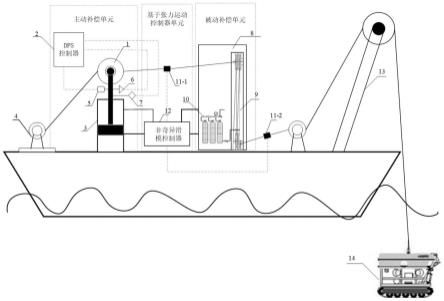
图1是本发明的总体结构示意图;
[0030]
图2是本发明的主动补偿单元内部工作原理示意图;
[0031]
图3是本发明的主动补偿单元电液伺服阀方法示意图;
[0032]
图4是本发明的主动补偿单元dsp控制器方法示意图;
[0033]
图5是本发明的主动补偿单元控制方法示意图;
[0034]
图6是本发明的被动补偿单元被动补偿气缸示意图;
[0035]
图7是本发明的被动补偿单元一侧被动补偿气瓶示意图;
[0036]
图8是本发明的被动补偿单元气瓶局部运转示意图;
[0037]
图9是本发明的基于张力运动切换控制器单元方法示意图。
具体实施方式
[0038]
下面结合附图对本发明做进一步描述。
[0039]
根据图1~图9,一种rov释放回收的半主动升沉补偿装置包括:主动补偿单元滑轮1,dsp控制器2,主动补偿液压缸3,储缆绞车4,压力传感器5,位移传感器6,速度传感器7,被动补偿装置8,被动补偿液压缸9,被动补偿气缸组10,张力传感器a 11-1,张力传感器b11-2,非奇异滑模控制器12,收放支撑架13,作业rov14,电液伺服阀15,压力表16,过滤器17,变量泵18,截止阀19,油缸20,溢流阀21,主动补偿蓄能器22,单向阀23,角度传感器24,电动机25,转速传感器26,蓄电池组27,被动补偿单元导轮28,框架支座29,被动补偿一侧蓄气气瓶组30,被动补偿蓄能器31,被动补偿一侧蓄能气瓶组32,气瓶支撑板33,被动补偿液阀34,被动补偿蓄能气瓶组气阀35,被动补偿蓄气气瓶组气阀36,被动补偿快速接头阀37,被动补偿充油阀38。
[0040]
一种rov释放回收的半主动升沉补偿装置主要包括:主动补偿单元、气-液弹性储能被动补偿单元、以及基于张力运动切换控制器单元。同时添加相关的张力传感器、储缆绞车4、滑轮作为辅助装置。
[0041]
所述的主动补偿单元包括:两个主动补偿补偿缸3、电液伺服阀15、压力表16、过滤器17、变量泵18、截止阀19、油缸20、溢流阀21以及dsp控制器2组成。其中主动补偿液压缸3
由变量泵18提供动力,主动补偿液压缸3与电液伺服阀15相连接,通过主动控制电液伺服阀15的阀芯位移来控制管道内液体的流量进而使得主动补偿补偿缸3中无杆腔与有杆腔存在压力变化,从而实现对主动补偿液压缸3中活塞杆的上下位移运动进行控制。所述的主动补偿液压缸3中其活塞杆连接一个主动补偿单元滑轮1,为定滑轮,通过缆绳将储缆绞车4、主动补偿单元、基于张力运动切换控制器单元以及被动补偿单元连接在一起。其中,所述的储缆绞车4固定在母船;主动补偿液压缸3无杆腔依次与电液伺服阀15、压力表16、过滤器17、变量泵18、截止阀19以及油缸20相连,过滤器17和变量泵18上并联有溢流阀21。具体的,主动补偿液压缸3的无杆腔通过过滤器17、变量泵18连接截止阀19以及油缸20;电液伺服阀15串联于截止阀19和单向阀23之间,单向阀23与主动补偿蓄能器22相连;变量泵18上并联有溢流阀21,变量泵18依次连接有电动机25和转速传感器26,电动机25连接有蓄电池组27,蓄电池组27将承担着将系统中液压能与电能相互转化的任务,变量泵18还连接有角度传感器24;在压力传感器5、位移传感器6、速度传感器7、角度传感24、转速传感器26、电液伺服阀15均与dsp控制器2连接。同时选取主动补偿液压缸3为非对称双作用液压缸,其可以提供两个方向的输出的行程,具有满足外伸内缩时带动负载的功能以及结构紧凑占用空间小等优良特点。所述的电液伺服阀15作为主动补偿单元的主要控制部件,基于dsp控制器2的控制对流向主动补偿液压缸3的液体流量起到调节作用,进而控制主动补偿液压缸3中无杆腔与有杆腔间的压力变化。由于电液伺服阀15可以将较小电控信号按比例转换成较大的液压功率,即电液伺服阀15可以在液压伺服中起到放大、转换作用,使得液压驱动提高功率和适应性,其不仅体积小、质量轻,同时在主动补偿单元中具有控制精度高响应快、运动平稳可靠、等优点。其中,电液伺服阀15为双喷嘴挡板力反馈电液伺服阀15,内部二级伺服线圈相串联。其具有压力灵敏度高、线性好、响应速度快等优点。作为主要控制部件,需要确定电液伺服阀15的流量额定值进行适配选取。基于主动补偿液压缸3为非对称双作用液压缸导致通过电液伺服阀15的两条流路的流量是不同的,由此定义有杆腔的流量为q1,无杆腔的流量为q2,主动补偿液压缸3的有杆腔的作用面积为a1,主动液压补偿液压缸3的无杆腔的作用面积为a2,则有以下关系:
[0042][0043]
由于电液伺服阀15的流量平方与压降成正比,由此可得:
[0044][0045]
其中,p为主动补偿单元压力,p1为有杆腔压力,p2为无杆腔压力,p
t
为背压值。由于本发明采用单根伺服液压驱动,由此针对外伸行程,力平衡方程为:
[0046]
p2a2=p1a1+f,
[0047]
其中,f为外伸时的推力。将式(1-2)与式(1-3)联立得:
[0048]
[0049][0050]
定义主动补偿液压缸3的活塞杆的最高速度为v
max
,主动补偿液压缸3的活塞杆的所需流量为q3,电液伺服阀15每条流路的压降为p3,电液伺服阀15的额定流量为q。则:
[0051]
q3=v
max
a2[0052][0053]
同理,对缩短行程用于上述公式进行求解,将外伸行程与缩短行程得出的电液伺服阀15额定流量值进行比较,选取最大值作为选取电液伺服阀15的依据指标。同时,在电液伺服阀15控制非对称双作用液压缸过程中,由于伺服放大器输出相同幅值的电信号,而对称双作用液压缸的无杆腔与有杆腔作用面积不同,导致出现活塞杆在两个方向上出现速度不同的情况。为保证活塞杆速度一致,需要考虑下列等式:
[0054][0055]
式中p4为供油压力,p5为回油压力,g为负载重量。当数据等式平衡时达到目的。所述的压力表16用于监测主动补偿液压缸3内液体压力值;所述的过滤器17通过过滤杂质来防止主动补偿液压缸3中的液压油被污染;所述变量泵18为主动补偿单元提供动力能源;所述的溢流阀21作为主动补偿单元的安全阀使用;所述的截止阀19为油缸20与主动补偿液压缸3间的安全阀;所述的油缸20为整个装置供油。
[0056]
所述的dsp控制器2为主动补偿单元的主要控制器。在rov14收放作业时遇到较高等级的海况环境时,通过位移传感器6、压力传感器5、转速传感器26、角度传感器24以及速度传感器7,检测到由风浪引起的甲板的相对速度和液压马达的转速,将数据传到控制器中。控制器算出误差后,发出控制信号,控制电液伺服阀15的开口的大小和方向,进而调节rov14的主动补偿。其中,dsp控制器2的功能在于搭配旋转编码器和信号转换模块用于接收指令和反馈信号,随后计算出偏差并输出控制信号。在整个控制过程中,dsp控制器2接收上位机的信号,根据接收的命令进行a/d转换,然后经过控制算法实现电液伺服阀15的位置控制、速度控制。在此过程中通过功率放大器进行功率放大,直接驱动电液伺服阀15,进而实现对输出流量和压力进行连续双向控制;传感器将检测出的数据转换成数字量最为变量输入dsp控制器2算法程序,实现多种形式的闭环控制。在控制算法方面运用pid控制算法,其基本原理为:根据获得的指令信号与反馈信号进行比较,从而获得跟踪误差信号,由pid算法给出控制信号;随后得到的控制信号经过伺服放大器发大后驱动电液伺服阀15;随后电液伺服阀15控制液压油流量进而控制主动补偿液压缸3中压力变化,之后移动主动补偿液压缸3中的活塞杆消除误差,进而完成控制目的。具体的:通过dsp控制器2的ad采样模块读取的位置传感器信号,由于存在噪声可能会对信号的可靠性造成影响,需要对位置信号进项滤波处理,随后将最后得到的差值输入到pid控制器2中,经由pid控制算法计算出的结果输送给da模块,da模块将接收的指令以模拟量输出作用与电液伺服阀15上,进而控制电液
伺服阀15开启的方向和阀口大小,最后控制主动补偿液压缸3运动补偿rov14收放作业。当收放作业时,由于惯性力的作用,缆绳以及rov有维持原位置的趋势,这会造成在收放过程中存在向上或向下的运动方式。基于此,张力传感器a11-1与张力传感器11-2b将实时张力信号传递给dsp控制器2,dsp控制器2控制主动补偿液压缸3使其活塞杆向上或向下的运动,进而抵消向上或向下的运动方式对主动补偿液压缸3的影响,达到主动补偿效果。主动补偿液压缸3的活塞杆在向上或向下运动的过程中,变量泵18和主动补偿蓄能器22将油液输送至主动补偿液压缸3的无杆腔,dsp控制器2控制电液伺服阀15从而改变流向主动补偿液压缸3的液体流量;液体流入主动补偿液压缸3的无杆腔后,为系统提供相应动力,使得主动补偿液压缸3中的活塞杆上升或下降,而压力传感器5、位移传感器6、速度传感器7角度传感器24、转速传感器26将各自的实时信号传输至dsp控制器2,实现系统的多闭环控制。基于此,完成主动补偿单元。至此,半主动升沉补偿装置针对rov收放过程中主被动补偿全部完成,达到对rov精准收放作业补偿。其中,经典pid控制算法的表达式为:
[0057][0058]
由于dsp控制器2采用的传感器信号时离散的,所以需要将上式中的连续微分和积分进行离散化处理。定义t为采样的周期,i为采用样序列号,在连续时间内用增量方式替换微分,求和方式替换积分则得到新表达式为:
[0059][0060]
其中,i取1,2,3,
……
,n;u0为初始输出值,un为第n次输出值,en为第n次输入的偏差值,e
n-1
为第n-1次输入的偏差值。通过对数据离散化的处理进一步优化数据,从而达到精准控制的目的。
[0061]
所述的被动补偿单元以气-液弹性储能装置为主体包括:四个蓄能气瓶32、四个蓄气气瓶30、两个被动补偿蓄能器31、两个被动补偿液压缸9、一个动滑轮以及一个定滑轮组成。其中,蓄能气瓶32与蓄气气瓶30间串联连接;动滑轮与定滑轮通过缆绳连接组成被动补偿单元导轮28放置在框架支座29,同时在被动补偿单元导轮28两侧各连接一个连接器,将两个被动补偿液压缸9对称放置在被动补偿单元导轮28两侧,被动补偿液压缸9的输出端口与连接器相连。所述的蓄能气瓶32、蓄气气瓶30以及被动补偿蓄能器31均对称放置在被动补偿液压缸9的两侧。其中蓄能气瓶32、蓄气气瓶30以及被动补偿蓄能器31均放置在气瓶支撑板33上;被动补偿蓄能器31的一端与被动补偿液压缸9的输入口相连接,另一端口通过气阀与蓄能气瓶32过气端口相连,同时被动补偿蓄能器31还与外部油路相连同;蓄能气瓶32的充气阀端口与蓄气气瓶30相连接。当在低等级海况进行rov14收放作业时,将运用被动补偿单元进行工作。在被动补偿过程中,被动补偿装置8开始工作。在被动补偿装置8工作前需要进行以下预处理:打开被动补偿液阀34和被动补偿蓄气气瓶组气阀36,让被动补偿一侧蓄气气瓶组30给被动补偿蓄能器31充气。充气完毕后,关闭被动补偿蓄气气瓶组气阀36。然后,打开被动补偿充油阀38,通过被动补偿快速接头阀37给被动补偿液压缸9和被动补偿蓄能器31充油。充油完毕后,关闭各个阀门。在收放作业过程中,当母船随海浪上升而上升时水下rov并不会及时做出跟随上升动作,此时被动补偿单元导轮28上缆绳的张力会增加,缆
绳张力的增加使得被动补偿液压缸3中的液压杆向下压缩,液压油流入被动补偿蓄能器31进而释放部分缆绳减少张力。当母船随海浪向下移动时,同理被动补偿液压缸9中的推力将液压杆相外推动,进而收紧缆绳,增加张力,保证rov的稳定。同时针对由于连续作业造成的刚度问题,气-液弹性储能装置可按需要通过依次打开被动补偿液阀34以及被动补偿蓄能气瓶组气阀35,利用框架支座29上的被动补偿气缸组10中的蓄气气瓶调节初始的气体体积以及改变被动补偿一侧蓄能气瓶组32工作数量来改变补偿气体的体积进而调节刚度,最终减少最大张力的波动。基于此,完成装置被动补偿单元。随后,当作业处于高等级海况环境下,实时拉力高于期望值时,被动补偿单元无法完成rov的收放补偿。由此,基于张力运动切换控制器单元通过张力传感器b11-2与张力传感器a11-1同时传输来的缆绳上的实时张力数据将信号切换至1转换为主动补偿单元。
[0062]
所述的基于张力运动切换控制器单元是以非奇异终端滑模控制器12为基础控制器,通过单元中的张力传感器检测收放作业时缆绳上的实时张力,基于切换信号本身的过去值和整体系统的状态进行主被动补偿方式的切换。所述的非奇异终端滑模控制器12是滑模控制一种,其本质是在滑模面上引入非线性项,从而可明显加快状态跟踪误差的收敛速度。由于海上作业环境是难以预测的,在收放作业中存在参数和模型出现不确定性以及未知的外部干扰参数的问题。因此,引入非奇异终端滑模控制器12作为基于张力运动切换控制器单元的基础控制器。与常规线性控制相比其作为非线性控制更适合实际需求满足严格复杂的设计要求,同时还具有简单、灵活、鲁棒性以及更快收敛速度的优点。非奇异终端滑模控制中二阶不确定性的非线性有干扰的状态方程为:
[0063][0064][0065]
其中,x=[x1,x2]
t
,f(x),b(x)为已知的系统状态非线性函数矩阵,b(x)≠0,g(x)为不确定性的外部干扰和系统模型且g(x)≤lg,u为系统控制输入向量。当收放作业开始时,需要给出张力期望x3,利用经过张力传感器检测的实时张力x,定义误差e,则:
[0066]
e=x
3-x
[0067]
非奇异滑模控制面为:
[0068][0069]
式中,β》0,p》q》0,p和q为正奇数。则二阶段状态方程非奇异终端滑模控制器为:
[0070][0071]
所述的切换信号依赖其本身的过去值以及系统的状态,即以张力传感器检测的实时张力为数据。本发明的切换信号采取事件驱动的切换律:
[0072]
σ(t
+
)=s(σ(t-),x(t))
[0073]
式中,σ为切换信号,σ(t-)为切换信号本身的过去值,x(t)为系统的状态。其原理为:在收放作业进行时,根据张力传感器检测的实时张力判断是否切换主被动补偿方式,如果海况等级较低,判断实时张力,如果在期望值以内,则选择被动补偿方式,否则切换到主动补偿方式,此时切换信号为1。如果海况等级较高,判读实时张力,如果在期望值外,则选
择主动补偿方式,否则切换到被动补偿方式,此时切换信号为2。由此,基于张力运动切换控制器12单元建立完成,即非奇异终端滑模控制器根据实时张力与期望值的误差输出矩阵来控制补偿方式;张力传感器检测实时张力,决定驱动的切换信号;再根据驱动的切换信号选择主被动补偿方式。
[0074]
于上述的一种rov释放回收的半主动升沉补偿装置整体结构配置,本发明基于rov在作业中遇到不同等级海况环境下,为rov提供精准补偿,提高收放系统的精准度与通用性。一种rov释放回收的半主动升沉补偿装置的工作原理为:在rov收放作业过程中,收放支撑架13悬挂着作业rov14,储缆绞车4固定在船板上并通过缆绳连接各装置部件;张力传感器b11-2与张力传感器a11-1同时对缆绳上的实时张力进行数据收集,数据传输至基于张力运动切换控制器单元中。经由单元中的非奇异滑模控制器12处理,基于切换信号本身的过去值和整体系统的状态进行主被动补偿方式的切换。判定方式为:如果海况等级较低,判断实时张力,如果在期望值以内,则选择被动补偿方式,否则切换到主动补偿方式,此时切换信号为1。如果海况等级较高,判读实时张力,如果在期望值外,则选择主动补偿方式,否则切换到被动补偿方式,此时切换信号为2。当作业处于低等级海况环境下,实时拉力处于期望值以内,信号切换至2转换为被动补偿单元。
[0075]
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1