一种镜片物料盒全自动拆垛机的制作方法
1.本实用新型涉及一种镜片物料盒全自动拆垛机,属于镜片自动化生产设备技术领域。
背景技术:
2.目前,随着自动化技术的突飞猛进,许多镜片生产制造企业开始引用自动化生产线,但是,目前大多数的企业使用的自动化生产线并不完备,只能实现半自动化生产,尤其是放置镜片毛坯的物料盒进入生产加工线时,仍旧需要人工放置,并且劳动强度很大。
3.有鉴于上述的缺陷,本设计人,积极加以研究创新,以期创设一种镜片物料盒全自动拆垛机,使其更具有产业上的利用价值。
技术实现要素:
4.为解决上述技术问题,本实用新型的目的是提供一种镜片物料盒全自动拆垛机。
5.本实用新型的一种全自动拆垛机,包含竖直升降模块、过渡模块和水平移动模块。
6.所述水平移动模块安装在过渡模块和竖直升降模块上方,所述竖直升降平台模块包括丝杠模组,所述丝杠模组上安装有模组连接板和凹槽光电开关,所述模组安装板上通过加强板垂直连接物料盒放置板。
7.进一步的,所述过渡模块包括过渡板,所述过渡板上安装有接近开关,所述过渡板下方安装在纵向伸缩气缸的输出端上,所述纵向伸缩气缸安装在气缸安装板上,所述气缸安装板固定安装在支架上。
8.进一步的,所述气缸安装板上安装有直线轴承,所述过渡板上连接光轴,过渡板一端通过光轴和直线轴承滑动连接,用于保证过渡板在纵向气缸作用下稳定运动。
9.进一步的,所述模组安装板侧边装有感应片,光电开关通过感应片是否处于光电开关凹槽位置来确定丝杠模组是否处于零点和极限位置。
10.进一步的,所述过渡板上安装有特定宽度并带有倒角的安装块,通过配合物料盒底部的缺口,以此来限定物料盒的放置位置。
11.进一步的,所述过渡板比物料盒宽度窄,过渡板放置在同步传送带中间,过渡板下落过程中,物料盒正好落在同步传送带上。
12.进一步的,水平移动模块包括无杆气缸,所述无杆气缸固定安装在支架上,所述无杆气缸移动块上安装有抓取装置。
13.进一步的,所述抓取装置包括两个三轴气缸,所述三轴气缸输出端安装聚四氟乙烯块,所述两个三轴气缸安装在竖直安装板上,所述竖直安装板竖直安装在连接板上,所述连接板安装在无杆气缸移动块上。
14.借由上述方案,本发明至少具有以下优点:
15.本实用新型的镜片物料盒全自动拆垛机结构简单、体积小、可以完美匹配自动生产线、节省人工、降低劳动强度。
16.上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例并配合附图详细说明如后。
附图说明
17.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本实用新型的某个实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
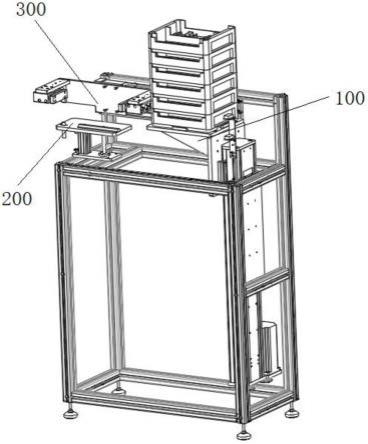
18.图1是本实用新型全自动拆垛机的立体结构示意图;
19.图2是本实用新型全自动拆垛机中竖直升降模块的结构示意图;
20.图3是本实用新型全自动拆垛机中过渡模块中的结构示意图;
21.图4是本实用新型全自动拆垛机中水平移动模块中的结构示意图。
22.其中,图中;
23.100、竖直升降模块;200、过渡模块;300、水平移动模块;
24.101、一号反射型光电开关;102、二号反射型光电开关;103、光电开关安装钣金;104、丝杠模组;105、一号凹槽光电开关;106、感应片;107、丝杠模组安装板;108、二号凹槽光电开关;109、连接板;110、加强板;111、物料盒放置板;112、物料盒限位块;
25.201、过渡板;202、光轴;203、直线轴承;204、气缸安装板;205、纵向伸缩气缸;206、接近开关;207、安装块;
26.301、无杆气缸固定块;302、无杆气缸移动块;303、无杆气缸连接板;304、三轴气缸加强板;305、竖直安装板;306、三轴气缸;307、聚四氟乙烯块。
具体实施方式
27.下面结合附图和实施例,对本实用新型的具体实施方式作进一步详细描述。以下实施例用于说明本实用新型,但不用来限制本实用新型的范围。
28.参见图1至图4,本实用新型一较佳实施例的一种全自动拆垛机,包括竖直升降模块100、过渡模块200和水平移动模块300。
29.如图2所示,竖直升降模块100包括一号反射型光电开关101、二号反射型光电开关102、光电开关安装钣金103、丝杠模组104、一号凹槽光电开关105、感应片106、丝杠模组安装板107、二号凹槽光电开关108、连接板109、加强板110、物料放置板111、物料盒限位块112。
30.丝杠模组104安装在丝杠模组安装板107上;丝杠模组104上方通过光电开关安装钣金103安装有一号反射型光电开关101和二号反射型光电开关102,通过一号反射型光电开关101和二号反射型光电开关102判断物料盒位置;丝杠模组104侧边安装有一号凹槽光电开关105和二号凹槽光电开关108,丝杠模组104运动部分安装感应片106,通过感应片106和一号凹槽光电开关105和二号凹槽光电开关108的配合,来确定丝杠模组104运动的上下极限位置;连接板109安装在丝杠模组104运动部分;物料放置板111安装在连接板109上,并通过加强板110连接稳固;四个物料盒限位块112安装在物料放置板111前后左右四个方位
上,以此来限制物料盒的放置区域,并保证丝杠模组104在上下运动时,物料盒不发生位移。
31.如图3所示,过渡模块200包括过渡板201、光轴202、直线轴承203、气缸安装板204、纵向伸缩气缸205、接近开关206、安装块207。
32.过渡板201一侧连接在纵向伸缩气缸205的输出端上,过渡板201另一侧安装光轴202;纵向伸缩气缸205安装在气缸安装板204上,气缸安装板204上安装直线轴承203;过渡板201通过光轴202和直线轴承201滑动连接,用于过渡板201上下运动更加稳定;接近开关206安装在过渡板201上,以此来检测物料盒是否放置到位;安装块207安装在过渡板201上,安装块207上方进行倒角处理,通过配合物料盒下端的缺口,自动实现物料盒在过渡板201上的位置校正,处于居中位置。外接同步传送带位于纵向伸缩气缸205两侧偏上方位置,当纵向伸缩气缸205输出端由伸出位置缩回带动过渡板201向下运动过程中,物料盒落在外接同步传送带上。
33.如图4所示,水平移动模块300包括无杆气缸固定块301、无杆气缸移动块302、无杆气缸连接板303、三轴气缸加强板304、竖直安装板305、三轴气缸306、聚四氟乙烯块307。
34.无杆气缸分为无杆气缸固定块301和无杆气缸移动块302,无杆气缸连接板303安装在无杆气缸移动块302上,三轴气缸306安装在竖直安装板305上,竖直安装板305安装在无杆气缸连接板303上,通过三轴气缸加强板304加强连接,聚四氟乙烯块307安装在三轴气缸306输出端上。
35.本实用新型的工作原理如下:
36.本实用新型的初始状态,水平移动模块300中的无杆气缸移动块302位于过渡模块200这一侧的上方位置,水平移动模块300中的两个三轴气缸306输出端处于收缩状态,过渡模块200中的纵向伸缩气缸205输出端处于收缩状态,竖直升降模块100中的物料放置板111移动到丝杠模组104上零点位置,即感应片106运动到一号凹槽光电开关105的凹槽位置。本实用新型开始工作时,将堆叠好的物料盒放置在物料放置板111上,并通过四个物料盒限位块112限制物料盒的放置区域。丝杠模组104向下运动,当最上方的物料盒高度低于二号反射型光电开关102时,丝杠模组104停止运动,水平移动模块300移动到竖直升降模块100的上方;随后丝杠模组104向上运动,当最上方的物料盒到达一号反射型光电开关时,丝杠模组104停止运动,水平移动模块300两侧的三轴气缸306输出端伸出,夹住最上方的物料盒并保持;随后丝杠模组104向下运动,当二号反射型光电开关102检测不到信号时,丝杠模组104停止运动,与此同时水平移动模块300移动到过渡模块200的上方;当水平移动模块300到达过渡模块200上方时,过渡模块200中的纵向伸缩气缸205伸出,三轴气缸306夹持的物料盒落在过渡板201上,接近开关206检测到信号,三轴气缸306输出端收缩,物料盒通过安装块207的导向作用落在过渡板201固定位置。最后,纵向伸缩气缸205输出端开始缩回带动过渡板201向下运动,向下过程中物料盒落在同步传送带上,自动进入生产线。随后,重复循环,实现眼镜物料盒的自动拆垛。
37.本实用新型的全自动拆垛机结构简单、体积小、可以完美匹配自动生产线、节省人工、降低劳动强度。最后应说明的几点是:首先,在本技术的描述中,需要说明的是,除非另有规定和限定,术语“安装”、“相连”、“连接”应做广义理解,可以是机械连接或电连接,也可以是两个元件内部的连通,可以是直接相连,“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变,则相对位置关系可能发生改变;
38.其次:本实用新型公开实施例附图中,只涉及到与本公开实施例涉及到的结构,其他结构可参考通常设计,在不冲突情况下,本实用新型同一实施例及不同实施例可以相互组合;
39.最后:以上仅是本实用新型的优选实施方式,并不用于限制本实用新型,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变型,这些改进和变型也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1