一种存储装置
1.本实用新型涉及自动控制领域,尤其涉及一种存储装置。
背景技术:
2.随着生物医学领域以及计算机领域的飞速发展,近年来,将智能化和生物医学相结合的自动化系统变得越来越成熟。96孔板是一种适用于细胞培养的容器,在生物医学自动化系统中应用十分广泛。自动化系统中大都采用机械臂完成96孔板的夹取、放置以及转移的动作,与此同时,在实验中不可避免地要将待使用的96孔板放入系统或是将不使用的96孔板移出系统。为了方便机械臂夹取、放置96孔板以及提高自动化系统的实验效率,需要一个结构合理的96孔板存储设备。
技术实现要素:
3.有鉴于此,本技术提出了一种存储装置,以提供结构合理的存储装置供机械臂夹取、放置物体。
4.根据本技术的一个方面,提供了一种存储装置,其中,所述存储装置包括:
5.驱动部件,
6.旋转部件,其与所述驱动部件相接以驱动所述旋转部件旋转,其中,所述旋转部件的内侧设置有支撑架,所述支撑架与所述驱动部件相接,所述支撑架的周向设有多个承载待存储对象的承载组件。
7.如上所述的存储装置,其中,所述承载组件包括沿所述支撑架的轴向间隔设置的多个承载架。
8.如上所述的存储装置,其中,所述支撑架的侧面沿其周向设有间隔设置的多个支撑板,所述支撑板沿所述支撑架的轴向延伸,所述支撑板沿所述支撑架的轴向设有间隔设置的多个所述承载架。
9.如上所述的存储装置,其中,还包括带轴支架,所述带轴支架设置于所述支撑架的下部且与所述支撑板相接,所述带轴支架与所述驱动部件相接。
10.如上所述的存储装置,其中,所述承载架的侧部预留有机械臂抓取的空间,所述承载架的挡板具有折角。
11.如上所述的存储装置,其中,还包括:底座,所述底座设置于所述旋转部件的下部。
12.如上所述的存储装置,其中,所述底座下部设有支腿。
13.如上所述的存储装置,其中,所述底座上设置有圆形转盘,所述支撑板的底部通过连接部件支撑在所述圆形转盘上。
14.如上所述的存储装置,其中,所述驱动部件包括:
15.电机,
16.联轴器,所述电机通过所述联轴器与所述带轴支架相接。
17.如上所述的存储装置,其中,还包括:
18.电机固定支架,其上设置有所述电机;
19.传感器,其设置于所述电机固定支架的侧部;以及
20.控制柜,其与所述电机和所述传感器相接。
21.本技术提供了一种结构合理的存储装置,可以方便机械臂夹取、放置物体。
22.本技术的其它特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
23.构成本技术的一部分的附图用来提供对本技术的进一步理解,本技术的示意性实施方式及其说明用于解释本技术。在附图中:
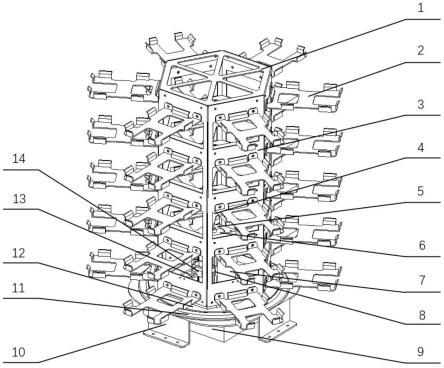
24.图1为本技术提供的存储装置示意图;
25.图2为本技术提供的存储装置内部结构示意图;
26.图3为本技术提供的承载架的结构示意图;
27.图4为本技术提供的支撑架的结构示意图;
28.图5为本技术提供的带轴支架的结构示意图;以及
29.图6为本技术提供的控制系统示意图。
30.附图标记说明:
31.1、支撑架(六角固定支架),2、承载架,3、支撑板,4、带轴支架(带轴六角固定支架),5、联轴器,6、电机,7、电机固定支架,8、传感器安装平台,9、控制柜,10、底座,11、圆形转盘,12、圆形转盘上半部分连接部件,13、光电传感器触发器,14、光电传感器。
具体实施方式
32.需要说明的是,在不冲突的情况下,本技术中的实施方式及各个实施方式中的特征可以相互组合。
33.下面将参考附图并结合实施方式来详细说明本技术。
34.如图1至图6所示,本技术提供了一种存储装置,其中,所述存储装置包括:驱动部件和旋转部件,其中,旋转部件与驱动部件相接以驱动旋转部件旋转,其中,旋转部件的内侧设置有支撑架1,支撑架1与驱动部件相接,支撑架1的周向设有多个承载待存储对象的承载组件。
35.在一具体实施例中,本技术的存储装置可以存储96孔板,当然也可以存储其他物体,在此不做具体限定,现以96孔板为例对本技术进行说明,以使本技术清楚,其并非对本技术的限制。
36.具体地,承载组件包括沿支撑架1的轴向间隔设置的多个承载架2(也可以称为载板架)。承载架2以堆栈方式安装在支撑板3上,支撑板3沿支撑架的轴向延伸,支撑板3沿支撑架1的轴向设有间隔设置的多个承载架2,支撑架1的下侧设置有带轴支架4,该带轴支架4紧贴在支撑板3内侧,联轴器5与该带轴支架4连接。如图2所示,在一具体实施例中,旋转部件的内侧设置有三个支撑架1和支撑架1下部的一个带轴支架4,带轴支架4和支撑架1的区别是带轴支架4带轴,而支撑架1不带轴,支撑架1和带轴支架4均为六边形。承载架2也具有镂空设计。承载架2在支撑架1的六个侧面上以堆栈方式设置,每层之间的间隔距离为100mm左右。承载架2的样式方便机械臂将96孔板从承载架2上夹取或是将96孔板放置在承载架2
上;承载架2的左右两侧以及前端所提供的空间预留方便机械臂安全平稳地夹取96孔板;为了提高夹取或放置96孔板的精确性,承载架2的挡板部分采用了带有折角的样式。
37.在一具体实施例中,如图1所示,该装置包括旋转部件和驱动部件;旋转部件的内侧设置有支撑架1和带轴支架4,该支撑架1和带轴支架4为六边形;驱动部件包括电机6及联轴器5,联轴器5与带轴支架4固定连接,电机6驱动联轴器5转动。支撑架1镂空设计以减轻重量,实现节能高效的目标。带轴支架4固定于支撑架1下侧,从而可以实现带轴支架4旋转时,支撑架1也一同旋转。该装置的旋转部件部分都可以采用铝合金材料制成,例如铝合金材料的型号为5052或6061,优选为6061。
38.进一步地,本技术的存储装置还包括底座10,底座10上设置有圆形转盘11,旋转部件的底部通过连接部件12(即圆形转盘上半部分连接部件)支撑在圆形转盘11上。该底座10具有支腿,使得底座与地面之间具有间隙,以放置控制柜9。
39.驱动部件包括电机固定支架7以及控制柜9,控制柜9设置于底座10与地面的空隙中,电机6及电机固定支架7设置在旋转部件内部,传感器14(例如,光电传感器)设置在传感器安装平台8上,传感器安装平台8设置于电机固定支架7的侧面。电机为步进电机,工作时控制柜9通过步进电机步距角以及给步进电机提供的脉冲数来计算每次转过的角度。
40.本技术提供的控制系统如图2所示。控制柜9中设置有控制板,控制板包括单片机,单片机与上位机、步进电机、通讯单元、传感器连接,通讯单元可以包括串口通信模块,wifi通信模块或者蓝牙通信模块等。上位机上可以通过人机交互界面显示装置的信息,并可以通过人机交互界面下发控制指令。需要说明的是,本技术的步进电机也可以替换为编码电机。
41.单片机和人机交互界面可以实时完成数据的交互;步进电机的旋转角以及各个承载架2是否有96孔板的状态信息会实时反馈给人机交互界面;在机械臂夹取或放置某个承载架2上的96孔板时,控制系统接收到数据后旋转部分会在步进电机驱动下旋转至对应位置,方便机械臂夹取或放置96孔板;通过步进电机步距角以及给步进电机提供的脉冲数来计算每次旋转的角度。由于可能存在累计误差,每工作一段时间可以通过光电传感器对存储装置的精度进行校准。之所以要使用传感器,是因为在多次使用该装置后,步进电机在使用过程中会带来累计误差。控制柜内控制板计算出的角度是一个确定的值,比如旋转30度。由于控制板计算的角度和电机实际旋转的角度可能存在些许误差,所以可以通过光电传感器14来初始化位置,减少累计误差,使得累计误差下降到初始值附近,这样就可以使得设备在一个误差比较小的环境下运行,提高装置的运动精度。光电传感器和光电传感器触发器配套使用,不做特殊说明的情况下,传感器包含了光电传感器14以及光电传感器触发器13。光电传感器14一般用于判断目标物体的运动位置,而仅有光电传感器14无法实现获取目标物体位置的功能,需要配套使用光电传感器触发器13。触发器13可以是一块小金属片,当运动到某一位置时,触发器13遮挡光电传感器14的光束,改变了光电传感器14的状态,从而将非电信号转换为电信号。
42.人机交互界面可以完成数据的实时交互,还可以通过发送控制指令完成设备的调试工作;人机交互界面可以有启动设备、关闭设备、复位以及旋转精度校准等按钮。
43.通讯单元可以通过串口以及其他通信方式(例如wifi或蓝牙)和人机交互界面实现数据交互,而且还可以通过通讯单元实现和其他设备的数据交互。控制指令通过通讯单
元发送给单片机从而控制步进电机和传感器做出响应。
44.自动化系统中液体处理部分以及酶标仪测定部分使用到的容器大都是96标准板,另外该系统还包含振荡培养部分,该部分使用到的容器为96深孔板。承载架2通过螺栓螺母固定在支撑板3上,支撑板3通过螺栓螺母与带轴支架4连接,这样可以保证精度,为了使设备可以更好地兼容96标准板和96深孔板,支撑板3上设置了足够多的螺栓孔,可根据实验中的孔板使用要求调整两块承载架2的上下安装间距,如图3所示。
45.该设备在自动化系统中主要和机械臂对接,所以承载架2的样式需要方便机械臂夹爪夹取和放置96孔板。承载架2的镂空设计一方面为了减轻设备整体的重量,提高运行效率,另一方面左右两侧的镂空也为机械臂夹爪稳定夹取96孔板提供了保障。
46.本实用新型中所述用语“以堆栈方式”是指按序或依次安装或排列。
47.以上所述仅为本技术的较佳实施方式而已,并不用以限制本技术,凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1