一种新型智能掏箱系统的制作方法
1.本实用新型涉及一种掏箱结构,具体为一种新型智能掏箱系统,属于货物安检技术领域。
背景技术:
2.根据航空货物安检工作流程,当检测出某集装箱或者集装板装上的货物有嫌疑物品时,工作人员需将货物搬运至开检区,由安检人员进行手动开箱检查,确认嫌疑物品是否为违禁品或危险品。
3.但由于集装板上货物较多,外观形状差别范围较大,且货物堆叠情况严重,可能需要大量的搬运工作才能找到带有嫌疑物品的货物,严重影响了开检效率,同时大大增加了人员的工作强度,尤其是当嫌疑集装板较多时,很容易造成开检区拥堵。
技术实现要素:
4.(一)解决的技术问题
5.本实用新型的目的就在于为了解决上述问题而提供一种新型智能掏箱系统,以解决现有技术中集装板上货物较多,外观形状差别范围较大,且货物堆叠情况严重,可能需要大量的搬运工作才能找到带有嫌疑物品的货物,严重影响了开检效率,同时大大增加了人员的工作强度,尤其是当嫌疑集装箱或者集装板较多时,很容易造成开检区拥堵的问题。
6.(二)技术方案
7.为实现以上目的,本实用新型通过以下技术方案予以实现:一种新型智能掏箱系统,包括安装架,所述安装架内部安装有集装板运输设备,所述安装架顶部设置有安装板,所述安装板顶部安装有机械臂,所述安装板顶部转动安装有两个往复丝杆,两个往复丝杆之间固定连接有连接杆,所述连接杆一侧设置有低速电机,所述往复丝杆外侧通过滚珠螺母副套设有移动板,所述移动板底部固定连接有长板,所述长板底部固定连接有多个3d视觉定位设备,所述安装板底部两侧均设置有危险物品扫描设备,所述安装架顶部设置有plc控制箱,所述机械臂、多个3d视觉定位设备和两个危险物品扫描设备均与plc控制箱电性连接。
8.优选地,所述安装板底部两侧均与安装架之间固定连接有支撑板,两个所述危险物品扫描设备分别固定连接于两个支撑板靠近机械臂的一侧,所述plc控制箱固定连接于支撑板一侧。
9.优选地,所述机械臂外侧固定套设有支撑架,所述支撑架固定连接于安装板顶部,所述机械臂底部贯穿安装板。
10.优选地,两个所述往复丝杆外侧一端均通过轴承转动套设有轴承座,所述轴承座固定连接于安装板顶部,两个所述往复丝杆外侧两端均固定套设有两个限位环。
11.优选地,所述安装板顶部开设有限位槽,所述移动板底部贯穿限位槽,所述长板设置于安装板与安装架之间。
12.优选地,所述安装板顶部前侧和后侧均固定连接有侧板,所述低速电机固定连接于其中一个侧板一侧。
13.优选地,所述连接杆外侧和低速电机输出轴外侧均固定套设有带轮,两个所述带轮外侧套设有皮带,所述皮带贯穿侧板并与侧板相接触。
14.本实用新型提供了一种新型智能掏箱系统,其具备的有益效果如下:
15.该新型智能掏箱系统,工作的机械臂将集装板上没有危险物品的箱体抓起放置到集装板运输设备顶部一侧,直到将装有危险物品的箱体抓起放置到集装板运输设备顶部另一侧后,此时plc控制箱控制集装板运输设备工作输送集装板和箱体,收到消息提醒的工作人员在集装板运输设备一端等候,将没有危险物品的箱体装到集装板顶部,将含有危险物品的箱体进行处理,可以快速找出集装板顶部固定箱体中含有危险物品的箱体,减少工作人员搬动搬货物的劳动量,提高开检效率,降低工作人员的工作强度和工作难度,减少拥堵的情况出现。
附图说明
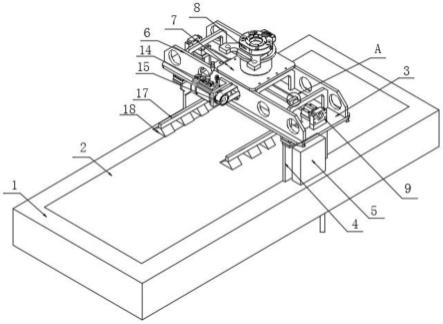
16.图1为本实用新型的整体结构示意图;
17.图2为本实用新型图1的a部结构示意图;
18.图3为本实用新型轴承座的结构示意图;
19.图4为本实用新型支撑板的结构示意图;
20.图5为本实用新型移动板的结构示意图。
21.图中:1、安装架;2、集装板运输设备;3、安装板;4、支撑板;5、plc控制箱;6、侧板;7、支撑架;8、机械臂;9、轴承座;10、往复丝杆;11、限位环;12、连接杆;13、带轮;14、皮带;15、低速电机;16、移动板;17、长板;18、3d视觉定位设备;19、危险物品扫描设备;20、限位槽。
具体实施方式
22.本实用新型实施例提供一种新型智能掏箱系统。
23.请参阅图1、图2、图3、图4和图5,包括安装架1,安装架1内部安装有集装板运输设备2,安装架1顶部设置有安装板3,安装板3底部两侧均与安装架1之间固定连接有支撑板4,两个危险物品扫描设备19分别固定连接于两个支撑板4靠近机械臂8的一侧,plc控制箱5固定连接于支撑板4一侧,安装板3顶部安装有机械臂8,机械臂8外侧固定套设有支撑架7,支撑架7固定连接于安装板3顶部,机械臂8底部贯穿安装板3,安装板3顶部转动安装有两个往复丝杆10,两个往复丝杆10外侧一端均通过轴承转动套设有轴承座9,轴承座9固定连接于安装板3顶部,两个往复丝杆10外侧两端均固定套设有两个限位环11,两个往复丝杆10之间固定连接有连接杆12,连接杆12一侧设置有低速电机15,往复丝杆10外侧通过滚珠螺母副套设有移动板16,安装板3顶部开设有限位槽20,移动板16底部贯穿限位槽20,长板17设置于安装板3与安装架1之间,移动板16底部固定连接有长板17,长板17底部固定连接有多个3d视觉定位设备18,安装板3底部两侧均设置有危险物品扫描设备19,安装架1顶部设置有plc控制箱5,机械臂8、多个3d视觉定位设备18和两个危险物品扫描设备19均与plc控制箱5电性连接,安装板3顶部前侧和后侧均固定连接有侧板6,低速电机15固定连接于其中一个
侧板6一侧,连接杆12外侧和低速电机15输出轴外侧均固定套设有带轮13,两个带轮13外侧套设有皮带14,皮带14贯穿侧板6并与侧板6相接触。
24.具体的,将集装板通过安装架1内部安装的集装板运输设备2进行运输,并且在安装架1固定的支撑板4一侧安装有危险物品扫描设备19,通过危险物品扫描设备19对货物进行扫描,当危险物品扫描设备19扫描到集装板顶部的箱体内部有危险物品时,会使与危险物品扫描设备19电性连接的plc控制箱5控制集装板运输设备2停止工作;
25.随后plc控制箱5控制低速电机15工作,并且低速电机15与连接杆12外侧均安装有带轮13,并且两个带轮13之间通过皮带14形成传动关系,因此工作的低速电机15通过带轮13和皮带14带动连接杆12旋转,并且连接杆12两端均固定连接有的往复丝杆10通过轴承座9转动安装在安装板3顶部,因此旋转的连接杆12带动往复丝杆10在安装板3顶部进行旋转,并且往复丝杆10外侧通过滚珠螺母副套设的移动板16贯穿安装板3开设的限位槽20,因此往复丝杆10旋转时,会使移动板16在限位槽20的限位下进行往复运动,使移动板16底部通过长板17安装的多个3d视觉定位设备18进行往复运动,使多个3d视觉定位设备18扫描集装板顶部的货物后,将精准的集装板顶部箱体的三维坐标信息输送到plc控制箱5内部,使plc控制箱5根据三维坐标信息和危险物品扫描设备19提供的装有危险物品的箱体的信息,使plc控制箱5控制机械臂8工作,工作的机械臂8将集装板上没有危险物品的箱体抓起放置到集装板运输设备2顶部一侧,直到将装有危险物品的箱体抓起放置到集装板运输设备2顶部另一侧后,此时plc控制箱5控制集装板运输设备2工作输送集装板和箱体,收到消息提醒的工作人员在集装板运输设备2一端等候,将没有危险物品的箱体装到集装板顶部,将含有危险物品的箱体进行处理,可以快速找出集装板顶部固定箱体中含有危险物品的箱体,减少工作人员搬动搬货物的劳动量,提高开检效率,降低工作人员的工作强度和工作难度,减少拥堵的情况出现。
26.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1