一种智能分类垃圾箱的制作方法
1.本实用新型涉及垃圾箱的技术领域,尤其是一种智能分类垃圾箱。
背景技术:
2.随着社会的不断进步,垃圾箱在各行各业中得到了广泛的运用。目前市场上使用的垃圾箱多种多样,但是前提是都需要人为将垃圾投入箱体内。为了适应环境保护的需要,目前需要人们对垃圾进行分类投箱,这样可以很好的对后续垃圾进行处理;但是垃圾分类还是需要人们进行提前分类,操作起来很不方便,而且还会存在投箱错误的现象,这就需要人们对垃圾分类的理念进行深入学习,这样无疑会增加人们对垃圾箱的整体使用负担,造成使用过程中的繁琐。
技术实现要素:
3.本实用新型要解决的技术问题是:为了解决上述背景技术中存在的问题,提供的是一种智能分类垃圾箱,无需人为提前分类,可一次性投入后自动分类投箱,节约时间和精力,也可以在很大程度上提高垃圾箱的使用便利性,可以与传统垃圾箱媲美,又可以满足整体环保的需求。
4.本实用新型解决其技术问题所采用的技术方案是:一种智能分类垃圾箱,包括底座,所述的底座上端面上均匀放置分类垃圾桶,所述的分类垃圾桶的上端的螺旋嵌入分拣组件下端;所述的分拣组件包括基座,所述的基座底部端面上开设分投料口,所述的分投料口的一侧水平设置传送带,所述的基座上端面一侧设置垃圾总投入口;所述的传送带上部相对分投料口位置处均设置分拣夹爪,所述的分拣夹爪上端连接驱动气缸,所述的驱动气缸的上部通过齿轮套固定,所述的齿轮套与齿轮带啮合;所述的齿轮带外接减速电机。
5.进一步地限定,上述技术方案中,所述的分拣组件的上部还设置监测组件,所述的监测组件包括红外透视仪、物体识别仪和控制器;所述的红外透视仪嵌入设置在基座内顶部端面上;所述的物体识别仪设置在红外透视仪一侧;所述的红外透视仪和物体识别仪均分别通过导线连接控制器,所述的控制器设置在基座外部上端面上;这样的设计可通过监测组件的监测来实现垃圾的快速识别分类,方便后续的分拣。
6.进一步地限定,上述技术方案中,所述的分拣组件的一侧还设置推料组件,所述的推料组件相对分投料口位置设置,所述的推料组件包括推料气缸和推料板,所述的推料气缸水平设置在传送带一侧,所述的推料气缸的伸缩端连接推料板;这样的设计可以通过推料组件来实现同类垃圾的一次性入箱。
7.进一步地限定,上述技术方案中,所述的分投料口内壁上均设置内螺纹,所述的分类垃圾桶上端口与分投料口螺纹连接固定;这样的设计是为了方便其后续的更换。
8.进一步地限定,上述技术方案中,所述的底座上均匀设置若干凸块,所述的分类垃圾桶下端均设置凹坑,所述的分类垃圾桶通过凹坑套设在凸块上实现限位固定;可起到很好的限位固定效果。
9.进一步地限定,上述技术方案中,所述的推料气缸的外侧还设置防护罩,可有效的对推料气缸进行保护。
10.进一步地限定,上述技术方案中,所述的底座下端还设置滚轮;方便其推动到各个位置进行使用。
11.本实用新型的有益效果是:本实用新型提出的一种智能分类垃圾箱,无需人为提前分类,可一次性投入后自动分类投箱,节约时间和精力,也可以在很大程度上提高垃圾箱的使用便利性,可以与传统垃圾箱媲美,又可以满足整体环保的需求。
附图说明
12.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
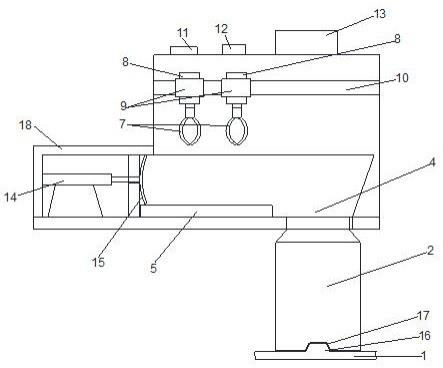
13.图1是本实用新型的连接示意图;
14.图2是图1中推料组件、监测组件、分拣夹爪和驱动气缸的分布示意图。
15.附图中的标号为:1、底座,2、分类垃圾桶,3、基座,4、分投料口,5、传送带,6、垃圾总投入口,7、分拣夹爪,8、驱动气缸,9、齿轮套,10、齿轮带,11、红外透视仪,12、物体识别仪,13、控制器,14、推料气缸,15、推料板,16、凸块,17、凹坑,18、防护罩,19、滚轮。
具体实施方式
16.为了使本实用新型所解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
17.在本技术中,驱动气缸8、红外透视仪11、物体识别仪12、控制器13、推料气缸14和传送带5都是根据具体型号直接从市场上购置后匹配安装使用。
18.在本技术中,物体识别仪12内集成了上万种垃圾形状颜色气味及大小的数据,只需要进行简单比对就可以实现其快速识别,方便控制器13做出相应的控制。
19.当控制器13控制驱动气缸8伸出的时候,可以使得分拣夹爪7下移进行垃圾的抓取操作。
20.见图1和图2所示的是一种智能分类垃圾箱,包括底座1,底座1上端面上均匀放置分类垃圾桶2,分类垃圾桶2的上端的螺旋嵌入分拣组件下端;分拣组件包括基座3,基座3底部端面上开设分投料口4,分投料口4的一侧水平设置传送带5,基座3上端面一侧设置垃圾总投入口6;传送带5上部相对分投料口4位置处均设置分拣夹爪7,分拣夹爪7上端连接驱动气缸8,驱动气缸8的上部通过齿轮套9固定,齿轮套9与齿轮带10啮合;齿轮带10外接减速电机。
21.其中,分拣组件的上部还设置监测组件,监测组件包括红外透视仪11、物体识别仪12和控制器13;红外透视仪11嵌入设置在基座3内顶部端面上;物体识别仪12设置在红外透视仪11一侧;红外透视仪11和物体识别仪12均分别通过导线连接控制器13,控制器13设置在基座3外部上端面上。分拣组件的一侧还设置推料组件,推料组件相对分投料口4位置设
置,推料组件包括推料气缸14和推料板15,推料气缸14水平设置在传送带5一侧,推料气缸14的伸缩端连接推料板15。分投料口4内壁上均设置内螺纹,分类垃圾桶2上端口与分投料口4螺纹连接固定。底座1上均匀设置若干凸块16,分类垃圾桶2下端均设置凹坑17,分类垃圾桶2通过凹坑17套设在凸块16上实现限位固定。推料气缸14的外侧还设置防护罩18。底座1下端还设置滚轮19。
22.该智能分类垃圾箱的操作原理如下:
23.首先,人们可有直接将垃圾通过垃圾总投入口6投入到基座3内的传送带5上,通过控制器13可以控制其传送运行,在转送过程中,垃圾会经过监测组件的监测,通过红外透视仪11快速识别其垃圾进行影像传递给控制器13, 控制器13将其信号传递给物体识别仪12进行识别比对,在比对成功后会通过分拣夹爪7进行特定位置的抓取操作,最后控制减速电机运行使得分拣夹爪7移动到相应的分投料口4上端后松开分拣夹爪7,垃圾自动入箱;当监测组件检测传送带5上是同一种垃圾的时候,会会控制推料气缸14伸出,通过推料板16直接将其整体推入分投料口4内收集,这样就避免传统通过人为来进行分拣后入箱带来的繁琐。
24.以上所述的,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1