一种基于港口货物装卸的智能输送装置的制作方法
1.本发明涉及货物装卸技术领域,具体涉及一种基于港口货物装卸的智能输送装置。
背景技术:
2.港口是位于海、江、河、湖、水库沿岸,具有水陆联运设备以及条件以供船舶安全进出和停泊的运输枢纽。港口是水陆交通的集结点和枢纽处,是工农业产品和外贸进出口物资的集散地,也是船舶停泊、装卸货物、上下旅客、补充给养的场所。在中国,沿海港口建设重点围绕煤炭、集装箱、进口铁矿石、粮食、陆岛滚装、深水出海航道等运输系统进行,特别加强了集装箱运输系统的建设。
3.现有的港口在对货物进行装卸输送时,为了省力工作人员经常使用夹持设备,将货物夹持到运输带上或者集装箱内部,而现有技术中,在对货物进行夹持时,货物外壁上可能存在大量的大颗粒杂质,而这些杂质的存在,可能使夹持装置在对一些货物造成硬性损伤,从而降低了夹持效率。
技术实现要素:
4.为解决上述技术问题,本发明提供一种基于港口货物装卸的智能输送装置,包括:控制箱,所述控制箱的顶部中轴处设置有挂环,所述控制箱的内部中轴处设置有双螺纹杆,所述双螺纹杆的两端分别贯穿控制箱的左右两侧外壁并延伸至外侧,所述双螺纹杆的左侧延伸谷通过轴承与控制箱的侧壁转动连接,所述双螺纹杆的右侧延伸部固定连接有电机,所述控制箱的底侧外壁中轴处开设有滑槽,夹持箱,所述夹持箱的数量为两个,两个所述夹持箱的顶部外壁中轴处分别固定连接有移动连接杆,所述移动连接杆远离夹持箱的一端固定连接有限位圈,所述限位圈滑动设置在双螺纹杆的外壁。
5.进一步地,所述夹持箱的侧壁固定连接有半圆橡胶囊,所述半圆橡胶囊的内部侧壁中轴处固定连接有移动横杆,所述移动横杆远离半圆橡胶囊的一端滑动贯穿夹持箱的侧壁并延伸至内部,其中,所述移动横杆的延伸部固定连接有气体挤压板,所述气体挤压板的外壁与夹持箱的侧壁接触设置。
6.进一步地,所述夹持箱远离半圆橡胶囊的一端连通设置有若干个l形导气管,所述l形导气管的两端分别连通设置有半圆橡胶管,其中,所述半圆橡胶管的外壁中轴处开设有半圆槽,所述半圆橡胶管的侧壁与半圆橡胶囊的外壁接触设置。
7.进一步地,所述气体挤压板远离移动横杆一侧外壁的两端分别固定连接有弧形弹性杆,所述弧形弹性杆远离气体挤压板的一端与控制箱的侧壁固定连接,其中,所述弧形弹性杆的外壁中轴处固定连接有辅助连接杆,所述辅助连接杆远离弧形弹性杆的一端滑动贯穿控制箱的侧壁并延伸至外侧,所述辅助连接杆的延伸部固定连接有连接球。
8.进一步地,所述连接球的正面外壁中轴处固定连接有辅助杆,所述辅助杆远离连接球的一端固定连接有辅助增强夹持板,其中,所述辅助增强夹持板呈半圆形设置,所述辅
助增强夹持板的呈半圆形设置处具有弹性。
9.进一步地,所述夹持箱上下两侧外壁分别开设有若干个辅助槽,若干个所述辅助槽,若干个所述辅助槽分别正对着若干个半圆橡胶管设置,其中,所述半圆橡胶管的内部滑动设置有气压球,所述气压球的底侧外壁固定连接有l形限位杆,所述l形限位杆滑动贯穿辅助槽的内部并延伸至外侧。
10.进一步地,所述l形限位杆的延伸部固定连接有限位挡板,所述限位挡板的前后两侧侧壁分别固定连接有压缩簧,所述压缩簧远离限位挡板的一端与夹持箱的侧壁固定连接。
11.进一步地,所述气压球远离l形限位杆的一侧外壁中轴处固定连接有弧形杆,所述弧形杆的侧壁固定连接有若干个硬性刷毛,其中,若干个所述硬性刷毛贯穿半圆槽的内部并延伸至外侧。
12.进一步地,两侧所述弧形杆之间固定连接有震动簧,所述震动簧的外壁上固定连接有若干个震动球,其中,若干个所述震动球悬空设置。
13.与现有技术相比,本发明的有益效果是:(1)、该基于港口货物装卸的智能输送装置,当需要对货物进行装卸运输时,可以将起吊装置挂住挂钩,然后调节控制箱的高度,当将控制箱调节到合适位置时,启动电机可以带动双螺纹杆发生转动,双螺纹杆的转动可以带动限位圈发生移动,限位圈的移动可以带动移动连接杆和夹持箱移动,以此实现对货物的夹持效果。
14.(2)、该基于港口货物装卸的智能输送装置,当夹持箱在对货物进行夹持时,利用货物的挤压力,可以使半圆橡胶囊发生变形,半圆橡胶囊的变形可以使移动横杆推动气体挤压板移动,气体挤压板的移动,可以对夹持箱内部的气体进行挤压,在挤压效果下,可以使气体进入到l形导气管的内部,在气体推动力的作用下,可以使气压球带动弧形杆发生移动,弧形杆的移动可以带动硬性刷毛沿着货物的外壁移动,从而利用硬性刷毛的移动效果,达到对货物表面清理的目的,防止货物表面存在大颗粒杂质,而影响夹持效果。
15.(3)、该基于港口货物装卸的智能输送装置,在对货物进行夹持过程中,弧形杆的移动可以带动震动簧发生震动,从而带动震动球发生抖动,利用震动球的抖动效果,可以对货物与夹持箱的夹持部位进行敲击,从而利用敲击震动效果,进一步增强了该装置对货物夹持面的清理效果,进一步增强了该装置的夹持效果,另一方面,当夹持箱完成对货物的夹持之后,由于半圆橡胶管和震动球的设置,可以使夹持箱的侧壁呈凹凸状态,进而利用此状态可以增强该装置与货物之间的摩擦力,从而进一步的增强了该装置对货物的夹持效果。
16.(4)、该基于港口货物装卸的智能输送装置,当气体挤压板在夹持箱内部移动时,可以对弧形弹性杆进行挤压,在挤压效果下,可以使弧形弹性杆发生变形,弧形弹性杆的变形可以推动辅助连接杆带动连接球移动,连接球的移动可以带动辅助杆和辅助增强夹持板移动,利用辅助增强夹持板的移动效果,可以增大夹持箱与货物之间的夹持面积,从而进一步的增强了该装置对货物的夹持效果。
附图说明
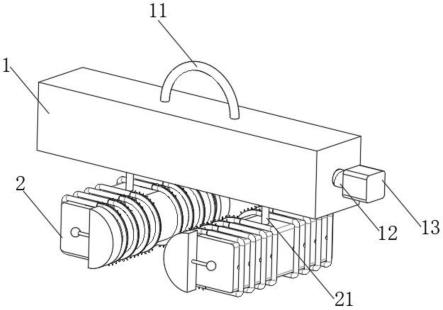
17.图1为本发明整体结构示意图;图2为本发明整体结构剖视图;
图3为本发明夹持箱整体结构示意图;图4为本发明夹持箱整体结构剖视图;图5为本发明半圆橡胶管整体结构示意图;图6为本发明气压球整体结构示意图。
18.图中:1、控制箱;11、挂环;12、双螺纹杆;13、电机;14、滑槽;2、夹持箱;21、移动连接杆;22、限位圈;3、半圆橡胶囊;31、移动横杆;32、气体挤压板;4、l形导气管;41、半圆橡胶管;42、半圆槽;5、弧形弹性杆;51、辅助连接杆;52、连接球;6、辅助杆;61、辅助增强夹持板;7、辅助槽;71、气压球;72、l形限位杆;8、限位挡板;81、压缩簧;9、弧形杆;91、硬性刷毛;10、震动簧;101、震动球。
具体实施方式
19.下面结合附图和具体实施方式对本发明作进一步详细的说明。本发明的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本发明限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本发明的原理和实际应用,并且使本领域的普通技术人员能够理解本发明从而设计适于特定用途的带有各种修改的各种实施例。
20.实施例1请参阅图1-图3所示,本发明为一种基于港口货物装卸的智能输送装置,包括:控制箱1,控制箱1的顶部中轴处设置有挂环11,这样设置的目的是为了便于对控制箱1进行拉动,控制箱1的内部中轴处设置有双螺纹杆12,这样设置的目的是为了便于对货物进行夹持,双螺纹杆12的两端分别贯穿控制箱1的左右两侧外壁并延伸至外侧,这样设置的目的是为了便于对双螺纹杆12进行限位,双螺纹杆12的左侧延伸谷通过轴承与控制箱1的侧壁转动连接,这样设置的目的是为了便于双螺纹杆12的转动,双螺纹杆12的右侧延伸部固定连接有电机13,这样设置的目的是为了便于提供外接动力,控制箱1的底侧外壁中轴处开设有滑槽14,这样设置的目的是为了便于辅助设置移动连接杆21;夹持箱2,夹持箱2的数量为两个,这样设置的目的是为了便于对夹持箱2进行限位,两个夹持箱2的顶部外壁中轴处分别固定连接有移动连接杆21,这样设置的目的是为了便于夹持箱2的移动,移动连接杆21远离夹持箱2的一端固定连接有限位圈22,这样设置的目的是为了便于限位圈22的移动,限位圈22滑动设置在双螺纹杆12的外壁,这样设置的目的是为了便于对限位圈22进行限位。
21.夹持箱2的侧壁固定连接有半圆橡胶囊3,这样设置的目的是为了便于对货物进行夹持,半圆橡胶囊3的内部侧壁中轴处固定连接有移动横杆31,这样设置的目的是为了便于利用半圆橡胶囊3的变形效果,移动横杆31远离半圆橡胶囊3的一端滑动贯穿夹持箱2的侧壁并延伸至内部,这样设置的目的是为了便于移动横杆31的移动;其中,移动横杆31的延伸部固定连接有气体挤压板32,这样设置的目的是为了便于利用移动横杆31的移动效果,气体挤压板32的外壁与夹持箱2的侧壁接触设置,这样设置的目的是为了便于对气体挤压板32进行限位。
22.夹持箱2远离半圆橡胶囊3的一端连通设置有若干个l形导气管4,这样设置的目的是为了便于导气,l形导气管4的两端分别连通设置有半圆橡胶管41,这样设置的目的是为
了便于增大夹持箱2与货物之间的摩擦力;其中,半圆橡胶管41的外壁中轴处开设有半圆槽42,这样设置的目的是为了便于辅助设置内部结构,半圆橡胶管41的侧壁与半圆橡胶囊3的外壁接触设置,这样设置的目的是为了便于对半圆橡胶管41进行限位。
23.实施例2请参阅图1-图6所示,本发明为一种基于港口货物装卸的智能输送装置,包括:控制箱1,控制箱1的顶部中轴处设置有挂环11,这样设置的目的是为了便于对控制箱1进行拉动,控制箱1的内部中轴处设置有双螺纹杆12,这样设置的目的是为了便于对货物进行夹持,双螺纹杆12的两端分别贯穿控制箱1的左右两侧外壁并延伸至外侧,这样设置的目的是为了便于对双螺纹杆12进行限位,双螺纹杆12的左侧延伸谷通过轴承与控制箱1的侧壁转动连接,这样设置的目的是为了便于双螺纹杆12的转动,双螺纹杆12的右侧延伸部固定连接有电机13,这样设置的目的是为了便于提供外接动力,控制箱1的底侧外壁中轴处开设有滑槽14,这样设置的目的是为了便于辅助设置移动连接杆21;夹持箱2,夹持箱2的数量为两个,这样设置的目的是为了便于对夹持箱2进行限位,两个夹持箱2的顶部外壁中轴处分别固定连接有移动连接杆21,这样设置的目的是为了便于夹持箱2的移动,移动连接杆21远离夹持箱2的一端固定连接有限位圈22,这样设置的目的是为了便于限位圈22的移动,限位圈22滑动设置在双螺纹杆12的外壁,这样设置的目的是为了便于对限位圈22进行限位。
24.夹持箱2的侧壁固定连接有半圆橡胶囊3,这样设置的目的是为了便于对货物进行夹持,半圆橡胶囊3的内部侧壁中轴处固定连接有移动横杆31,这样设置的目的是为了便于利用半圆橡胶囊3的变形效果,移动横杆31远离半圆橡胶囊3的一端滑动贯穿夹持箱2的侧壁并延伸至内部,这样设置的目的是为了便于移动横杆31的移动;其中,移动横杆31的延伸部固定连接有气体挤压板32,这样设置的目的是为了便于利用移动横杆31的移动效果,气体挤压板32的外壁与夹持箱2的侧壁接触设置,这样设置的目的是为了便于对气体挤压板32进行限位。
25.夹持箱2远离半圆橡胶囊3的一端连通设置有若干个l形导气管4,这样设置的目的是为了便于导气,l形导气管4的两端分别连通设置有半圆橡胶管41,这样设置的目的是为了便于增大夹持箱2与货物之间的摩擦力;其中,半圆橡胶管41的外壁中轴处开设有半圆槽42,这样设置的目的是为了便于辅助设置内部结构,半圆橡胶管41的侧壁与半圆橡胶囊3的外壁接触设置,这样设置的目的是为了便于对半圆橡胶管41进行限位。
26.气体挤压板32远离移动横杆31一侧外壁的两端分别固定连接有弧形弹性杆5,这样设置的目的是为了便于利用气体挤压板32的移动挤压效果,弧形弹性杆5远离气体挤压板32的一端与控制箱1的侧壁固定连接,这样设置的目的是为了便于固定弧形弹性杆5;其中,弧形弹性杆5的外壁中轴处固定连接有辅助连接杆51,这样设置的目的是为了便于利用弧形弹性杆5的变形效果,辅助连接杆51远离弧形弹性杆5的一端滑动贯穿控制箱1的侧壁并延伸至外侧,这样设置的目的是为了便于辅助连接杆51的移动效果,辅助连接杆51的延伸部固定连接有连接球52,这样设置的目的是为了便于利用辅助连接杆51的移动效果。
27.连接球52的正面外壁中轴处固定连接有辅助杆6,这样设置的目的是为了便于利用连接球52的移动效果,辅助杆6远离连接球52的一端固定连接有辅助增强夹持板61,这样设置的目的是为了便于增大夹持箱与货物之间的接触面积;其中,辅助增强夹持板61呈半圆形设置,这样设置的目的是为了便于对辅助增强夹持板61进行限位,辅助增强夹持板61的呈半圆形设置处具有弹性,这样设置的目的是为了便于增强辅助增强夹持板61的夹持效果。
28.夹持箱2上下两侧外壁分别开设有若干个辅助槽7,这样设置的目的是为了便于辅助利用气压球71的移动效果,若干个辅助槽7分别正对着若干个半圆橡胶管41设置,这样设置的目的是为了便于对辅助槽7进行限位;其中,半圆橡胶管41的内部滑动设置有气压球71,这样设置的目的是为了便于利用气体的推动效果,气压球71的底侧外壁固定连接有l形限位杆72,这样设置的目的是为了便于利用气压球71的移动效果,l形限位杆72滑动贯穿辅助槽7的内部并延伸至外侧,这样设置的目的是为了便于l形限位杆72的移动。
29.l形限位杆72的延伸部固定连接有限位挡板8,这样设置的目的是为了便于利用l形限位杆72的移动效果,限位挡板8的前后两侧侧壁分别固定连接有压缩簧81,这样设置的目的是为了便于限位挡板8的快速复位,压缩簧81远离限位挡板8的一端与夹持箱2的侧壁固定连接,这样设置的目的是为了便于固定压缩簧81。
30.气压球71远离l形限位杆72的一侧外壁中轴处固定连接有弧形杆9,这样设置的目的是为了便于利用气压球71的移动效果,弧形杆9的侧壁固定连接有若干个硬性刷毛91,这样设置的目的是为了便于利用弧形杆9的移动效果;其中,若干个硬性刷毛91贯穿半圆槽42的内部并延伸至外侧,这样设置的目的是为了便于对硬性刷毛91进行限位。
31.两侧弧形杆9之间固定连接有震动簧10,这样设置的目的是为了便于利用弧形杆9的移动效果,震动簧10的外壁上固定连接有若干个震动球101,这样设置的目的是为了便于利用震动簧10的震动效果;其中,若干个震动球101悬空设置,这样设置的目的是为了便于对震动球101进行限位。
32.本实施例的一个具体应用为:当需要对货物进行装卸运输时,可以将起吊装置挂住挂钩,然后调节控制箱1的高度,当将控制箱1调节到合适位置时,启动电机13可以带动双螺纹杆12发生转动,双螺纹杆12的转动可以带动限位圈22发生移动,限位圈22的移动可以带动移动连接杆21和夹持箱2移动,以此实现对货物的夹持效果,其次,当夹持箱2在对货物进行夹持时,利用货物的挤压力,可以使半圆橡胶囊3发生变形,半圆橡胶囊3的变形可以使移动横杆31推动气体挤压板32移动,气体挤压板32的移动,可以对夹持箱2内部的气体进行挤压,在挤压效果下,可以使气体进入到l形导气管4的内部,在气体推动力的作用下,可以使气压球71带动弧形杆9发生移动,弧形杆9的移动可以带动硬性刷毛91沿着货物的外壁移动,从而利用硬性刷毛91的移动效果,达到对货物表面清理的目的,防止货物表面存在大颗粒杂质,而影响夹持效果。
33.其次,在对货物进行夹持过程中,弧形杆9的移动可以带动震动簧10发生震动,从而带动震动球101发生抖动,利用震动球101的抖动效果,可以对货物与夹持箱2的夹持部位
进行敲击,从而利用敲击震动效果,进一步增强了该装置对货物夹持面的清理效果,进一步增强了该装置的夹持效果,另一方面,当夹持箱2完成对货物的夹持之后,由于半圆橡胶管41和震动球101的设置,可以使夹持箱2的侧壁呈凹凸状态,进而利用此状态可以增强该装置与货物之间的摩擦力,从而进一步的增强了该装置对货物的夹持效果,同时,当气体挤压板32在夹持箱2内部移动时,可以对弧形弹性杆5进行挤压,在挤压效果下,可以使弧形弹性杆5发生变形,弧形弹性杆5的变形可以推动辅助连接杆51带动连接球52移动,连接球52的移动可以带动辅助杆6和辅助增强夹持板61移动,利用辅助增强夹持板61的移动效果,可以增大夹持箱2与货物之间的夹持面积,从而进一步的增强了该装置对货物的夹持效果。
34.显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域及相关领域的普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都应属于本发明保护的范围。本发明中未具体描述和解释说明的结构、装置以及操作方法,如无特别说明和限定,均按照本领域的常规手段进行实施。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1