智能物流分拣机器人
1.本实用新型涉及智能机器人,尤其涉及一种智能物流分拣机器人。
背景技术:
2.当下,我国中小区域物流节点仍为传统方式,很难配备三类机器人协同工作,货件的分类、挑拣和搬运主要依靠人工手搬肩扛,费时费力。而目前绝大部分的中小物流节点没有机器人,物流的分拣、运输、摆放都是由人工手动进行的,需要先将需要分拣的货物运输至仓库之后,物流工作人员会一个个扫描包裹上的条形码将信息录入系统,然后根据物流信息将包裹进行分类。这种完全人工的分拣系统在操作过程中,就有可能发生包裹损坏、放错等问题,导致分拣员的出错率和损坏率增加。
技术实现要素:
3.本实用新型要解决的技术问题在于,针对现有技术的缺陷,提供一种智能物流分拣机器人。
4.本实用新型解决其技术问题所采用的技术方案是:提供一种智能物流分拣机器人,包括移动主体、设置在所述移动主体上并用于叉起目标货物的搬运单元、分别与所述移动主体和所述搬运单元连接的控制模块;
5.所述控制模块用于依据目标货物信息控制所述搬运单元叉起所述目标货物,并控制所述移动主体沿预设路径移动;
6.所述控制模块内设有用于传输所述目标货物信息的无线传输模块,所述无线传输模块包括5g通信单元和/或wifi通信单元。
7.优选地,所述移动主体包括主体、设置在所述主体底部的全向轮、与所述全向轮连接并驱动所述全向轮转动的第一驱动电机。
8.优选地,所述搬运单元包括竖直设置在所述移动主体一侧上的导轨、相互平行地设置在所述导轨上的操作臂、驱动所述操作臂沿所述导轨方向作升降运动的第二驱动电机;
9.所述第二驱动电机和所述操作臂之间设置有用于传递动力的链传动机构。
10.优选地,所述搬运单元还包括设置在所述操作臂上的操作臂驱动电机,所述操作臂驱动电机与所述控制模块连接,并驱动所述操作臂叉起所述目标货物。
11.优选地,所述操作臂驱动电机包括第三驱动电机和舵机,所述第三驱动电机用于驱动所述操作臂沿水平方向作开合运动,所述舵机用于驱动所述操作臂转动。
12.优选地,所述智能物流分拣机器人还包括设置在所述移动主体上的循迹传感器,所述循迹传感器与所述控制模块通讯连接,并配合所述控制模块控制所述移动主体沿所述预设路径移动。
13.优选地,所述智能物流分拣机器人还包括设置在所述移动主体上的运动控制传感器,所述运动控制传感器与所述控制模块通讯连接,用于收集外界环境信息,并将所述外界
环境信息实时传递至所述控制模块。
14.优选地,所述运动控制传感器包括红外传感器和/或超声波传感器。
15.优选地,所述运动控制传感器还包括设置在所述移动主体底部的陀螺仪,所述陀螺仪用于监测所述移动主体的实时运动姿态信息并传递给所述控制模块。
16.优选地,所述智能物流分拣机器人还包括设置在所述移动主体上的数字摄像机,所述数字摄像机与所述控制模块连接,并配合所述控制模块识别出货物信息。
17.本实用新型至少具有以下有益效果:本实用新型的智能物流分拣机器人可在控制模块的控制下识别并获取特定的目标货物,并可沿预设路径移动,运输目标货物,完成对目标货物的分拣;同时其还配备了5g和wifi通信单元,使信息传输更为方便快捷,可为目前中小区域的物流产业提供更智能、更高效和更少人力成本的工作模式。
附图说明
18.下面将结合附图及实施例对本实用新型作进一步说明,附图中:
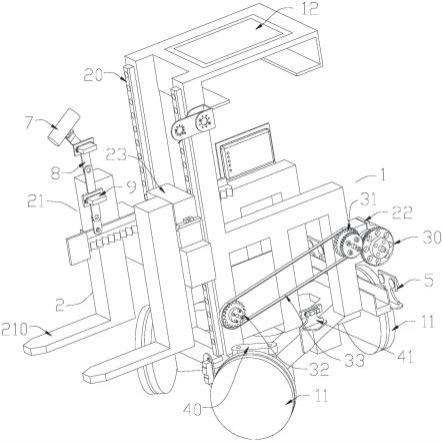
19.图1是本实用新型一实施例的智能物流分拣机器人结构示意图;
20.图2是本实用新型一实施例的智能物流分拣机器人一视角下的俯视图;
21.图3是本实用新型一实施例的智能物流分拣机器人的仰视图。
具体实施方式
22.为了对本实用新型的技术特征、目的和效果有更加清楚的理解,现对照附图详细说明本实用新型的具体实施方式。
23.图1-3示出了本实用新型一实施例的智能物流分拣机器人,包括移动主体1、设置在移动主体1上并用于叉起目标货物的搬运单元2以及分别与移动主体1和搬运单元2连接的控制模块(未图示)。
24.控制模块在本实施例中包括主控器。主控器可支持labview程序开发环境进行编程。labview程序开发环境,类似于c语言和basic开发环境,但是labview与其他计算机语言的显著区别是:其他计算机语言都是采用基于文本的语言产生代码,而labview使用的是图形化编辑语言g编写程序,产生的程序是框图的形式,框图的形式区别于代码的形式,可以非常方便直观地编制各种控制机器人的程序。同时labview针对ni myrio上的各种i/o接口提供经过优化设计的现成驱动函数,方便快速调用控制智能物流分拣机器人所需的相关函数,有利于智能物流分拣机器人的维护和操作。当然,在其他实施例中,控制模块也可以包括其他具有运算能力、可调用计算机程序的处理器、mcu等。
25.控制模块用于依据目标货物信息控制搬运单元2叉起目标货物,并控制移动主体1沿预设路径移动。
26.具体地,在智能物流分拣任务当中,控制模块的控制程序中具有条形码识别程序。控制模块对货物的条形码进行扫描,并将扫描到的条形码与目标货物信息对应的条形码进行一一比对,闭环控制至扫描到的条形码与目标货物信息对应的条形码匹配时认为识别成功,控制模块控制搬运单元2叉起目标货物进行运输。
27.进一步地,控制模块控制搬运单元2叉起目标货物后控制移动主体1沿预设路径移动,在智能物流分拣任务当中,该预设路径可以为a:从货件区到货架区。对应地,智能物流
分拣机器人识别目标货件,沿预设路径a将目标货件运输至货架区进行堆放。
28.在堆放步骤中,具体地,货架区的货架可以本市内、本省内、华东枢纽、华北枢纽、西北枢纽等区域进行分类。同理,货架区的货架可具有对应不同区域的条形码。控制模块可调用上述条形码识别程序对货架的条形码进行识别,并将扫描到的条形码与目标货架信息对应的条形码进行一一比对,闭环控制至扫描到的条形码与目标货架信息对应的条形码匹配时认为识别成功,控制模块控制搬运单元2叉起目标货物,将目标货物装进对应的货架。
29.或者,该预设路径可以为预设路径b:从货架区到货柜区。对应地,智能物流分拣机器人识别目标货架,沿预设路径b将目标货架运输至货柜区进行堆放。
30.在堆放步骤中,同理,货柜区的货柜可具有对应分类特征的条形码。控制模块可调用上述条形码识别程序对货柜的条形码进行识别,并将扫描到的条形码与目标货柜信息对应的条形码进行一一比对,闭环控制至扫描到的条形码与目标货柜信息对应的条形码匹配时认为识别成功,控制模块控制搬运单元2叉起目标货架,将目标货架装进对应的货柜。
31.为了实现目标货物信息的远距离传输,控制模块内设有用于传输所述目标货物信息的无线传输模块(未图示),无线传输模块包括5g通信单元和/或wifi通信单元。wifi通信单元可实现在物流分拣区局域网内对目标货物信息进行无线传输。5g通信单元的设置使得无线传输中信号的传输效率更高,可以更高效地实现对智能物流分拣机器人的技术控制。
32.对应智能物流机器人分拣任务下发的方式,目标货物信息包括由无线传输模块传输的目标货物信息,此时对应的是远程间接交互式的分拣任务下发。例如,可通过在手机等终端设备发送下发任务的指令,经无线传输模块传输至控制模块。
33.或者,目标货物信息也可以是控制模块通过调用条形码识别程序直接识别工作人员提供的货件单条形码得到的,此时对应的是直接交互式的分拣任务下发。
34.参阅图1-3示出的本实施例的智能物流分拣机器人,移动主体1包括主体、设置在主体底部的全向轮11、与全向轮11连接并驱动全向轮11转动的第一驱动电机10。为保证移动主体1移动时的稳定,在本实施例中设置三个全向轮11,在每个全向轮11处设置一个与其相连的第一驱动电机10,可实现精确控制移动主体1的行进方向和行进速度。当然,在其他实施例中,考虑智能物流分拣机器人的尺寸大小或其他实际应用需求等的不同,全向轮11的数量也可以为三个以上,与其适配的第一驱动电机10也可以根据全向轮11的设置数量、设置方位等进行相应数量上和位置上的调整,不应视为认定为对本实用新型保护范围的限制。
35.参阅图1-3示出的本实施例的智能物流分拣机器人,搬运单元2包括竖直设置在所述移动主体一侧上的导轨20、相互平行地设置在导轨20上的操作臂21、驱动操作臂21沿导轨20方向作升降运动的第二驱动电机22。操作臂21在本实施例中包括了两个间隔一段距离相互平行设置的叉条210,两个叉条210可沿水平方向作开合的相对运动。
36.进一步地,第二驱动电机22和操作臂21之间设置有用于传递动力的链传动机构。链传动机构可包括与第二驱动电机22相连的齿轮30、与齿轮30相连的链轮组、以及设置在链轮组上的链条33。链轮组包括第一链轮31和第二链轮32。
37.具体地,如图1-3所示,本实施例中的第二驱动电机设置在相对于移动主体1的前进方向的后方一侧,导轨20设置在相对于移动主体1前进方向的前方一侧。导轨20与移动主体1连接处设有垂直于第二链轮32并与第二链轮32啮合的转向齿轮(未图示)。通过互相垂
直的啮合方式改变齿轮传动的方向。第二驱动电机22输出的转矩经齿轮30、第一链轮31、链条33、第二链轮32传动至转向齿轮。在导轨20内设有传动丝杆(未图示),传动丝杆一端连接于转向齿轮,操作臂21通过螺母套接在传动丝杆的相对另一端,从而通过传动丝杆的转动带动操作臂21沿导轨20方向作直线升降运动。
38.参阅图1-3示出的本实施例的智能物流分拣机器人,搬运单元2还包括与操作臂21连接的操作臂驱动电机,操作臂驱动电机与控制模块连接,并依据控制模块发出的操作指令驱动操作臂21叉起目标货物。操作臂驱动电机可驱动操作臂21进行不同角度下的开合运动,以此适应目标货物的不同具体位置如高度、角度等,实现叉起目标货物的功能。
39.具体地,操作臂驱动电机可以包括用于控制操作臂21沿水平方向作开合运动的第三驱动电机(未图示),以及控制操作臂21转动的舵机23。为实现操作臂21沿水平方向作开合运动,在操作臂21与导轨20之间可设置一个横向导轨(图中未示出),操作臂21连接在横向导轨上,操作臂21可与横向导轨滑动配合,以实现操作臂21在水平方向上做开合运动。
40.参阅图1-3示出的本实施例的智能物流分拣机器人,智能物流分拣机器人还包括设置在移动主体1上的循迹传感器(未图示),循迹传感器与控制模块通讯连接,并配合控制模块控制移动主体1沿预设路径移动。
41.具体地,循迹传感器可以是具有灰度识别,颜色识别等功能的循迹传感器。对应预设路径的设置之前,可在地面作循迹传感器可识别的对应标记,循迹传感器实时接收对应标记的信息并转换为相应的信号输出给控制模块,控制模块接收相应的信号可分析出对应标记的特征,控制模块调用内部的导航程序,对应标记的特征作为计算参数用于导航程序中对应的机器学习算法模型,从而计算出最优的行进路线作为预设路径。
42.本实施例中的智能物流分拣机器人还包括设置在移动主体1上的运动控制传感器,运动控制传感器与控制模块通讯连接,用于收集外界环境信息,并将外界环境信息实时传递至控制模块。
43.进一步地,运动控制传感器包括红外传感器和/或超声波传感器。红外传感器可用于测量移动主体1本身与测量点之间的距离,例如移动主体1本身至货件区的距离,或者移动主体1本身至货架区的距离,又或者移动主体1本身至货柜区的距离等。控制模块接收该距离数值,可用于计算移动主体1的合理行进速度等运动参数。超声波传感器可实时发送超声波与周围环境交互形成反射波,控制模块接收反射波的信号,该反射波的信号可用于检测移动主体1周围是否存在障碍物,从而可根据环境情况实时调整移动主体1的预设路线,避开周围障碍物以及应对突发情况。
44.具体地,在本实施例中设置三个红外传感器,两个超声波传感器。其中,第一红外传感器40和第二红外传感器(未图示)分别设置在移动主体1上靠近万向轮11的位置;第三红外传感器41设置在两个万向轮之间。超声波传感器5设置在相对于移动主体1前进方向的后方处。在其他实施例中,红外传感器也可用于避障,超声波传感器也可用于测量移动主体1本身至货架区的距离等。根据具体使用需求等,两者也可相互配合或替换使用。
45.进一步地,运动控制传感器还包括设置在移动主体1底部的陀螺仪6,陀螺仪6用于监测移动主体1的实时运动姿态信息并传递给控制模块。陀螺仪6作为角运动传感器,可实时监测移动主体1相对于初始位置的角度偏移,该角度偏移数值用于控制模块中导航程序的机器学习算法模型,可以在移动主体1位置偏移初始位置时进行修正补偿,从而对移动主
体1的移动进行纠偏控制,提升其移动的稳定性和行进的灵活性。
46.本实施例中的智能物流分拣机器人还包括设置在移动主体1上的数字摄像机7,数字摄像机7与控制模块连接,并配合控制模块识别出货物信息。数字摄像机7在本实施例中为ccd摄像头,ccd摄像头中的ccd传感器采集画面像素大小为1280*720,可实时采集货物的条形码图像传递至控制模块,控制模块调用条形码识别程序可将采集的货物的条形码与数据库中的条形码进行比对,即可识别出货物信息,该货物信息可以是货物的目的地信息等。
47.进一步地,如图1所示,移动主体1上可设置有摄像机支架8,数字摄像头连接于摄像机支架8上,同时,为了使数字摄像机7具有较大的图像采集范围,可以在摄像机支架8上设置摄像机舵机9,可用于控制摄像机支架8的转动。为了实现更大范围的转动,本实施例中设置两个摄像机舵机9,可以使数字摄像机7具有较大的活动范围,从而可以采集位于不同方位的货物的货物信息。在其他一些实施例中,摄像机舵机9的数量也可以根据具体情况进行相应调整。
48.进一步地,移动主体1上还可以设置一显示屏12,显示屏12可实时显示数字摄像机扫描到的货物的条形码对应的货物信息。具体地,数字摄像机采集货物的条形码图像传递至控制模块,控制模块调用条形码识别程序可将采集的货物的条形码与数据库中的条形码进行比对,识别出采集的货物的条形码对应的货物信息并输出相应的数字信号至显示屏12,显示屏12示出对应的货物信息的图像。
49.以上仅为本实用新型的一些具体实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1