一种具备智能对位与辅助挂索功能的桥面吊机的制作方法
1.本实用新型涉及桥梁架设安装领域,具体为一种具备智能对位与辅助挂索功能的桥面吊机。
背景技术:
2.当前斜拉桥的施工方法中,节段梁对位施工通过采用手拉葫芦、撬棍、码板等施工机具配合起重设备进行节段梁的反复调整,从而完成节段梁的对位安装,斜拉索挂索施工采用的是汽车吊与手拉葫芦架相互配合的方式完成挂索施工。但是待安装梁与已安装梁衔接部分是动、静结合部,临边防护设置困难,却又是现场施工人员聚集的作业场所;斜拉桥挂索施工与桥面吊机吊装施工工作面高度重合,作业空间有限,特别是前端索挂索施工汽车吊辅助作业会与桥面吊干涉,采用手拉葫芦架每挂一次要重新进行安拆,而且挂索时进一步占用了有限的作业空间,施工相当繁琐,因此有必要研究一种具备智能对位与辅助挂索功能的桥面吊机克服目前施工存在的不足。
技术实现要素:
3.本实用新型的目的在于提供一种测量、对位、挂索一体化作业的桥面吊机,以解决作业空间有限,施工相互干扰,人员安全无法保障等问题。
4.为解决上述技术问题,本实用新型提供如下技术方案:一种具备智能对位与辅助挂索功能的桥面吊机,包括用于起吊待架梁的桥面吊机本体、设置在桥面吊机本体上的辅助挂索装置和搭载装置,所述搭载装置上设置有用于测量的摄影装置,所述摄影装置滑动设置在搭载装置上,所述辅助挂索装置用于辅助完成斜拉索的梁端挂索。
5.进一步地,所述搭载装置包括上搭载机构和下搭载机构,所述上搭载机构设置在下搭载机构上方,所述上搭载机构上吊有搭载杆,所述上搭载机构用于控制搭载杆的升降,所述下搭载机构用于固定搭载杆,所述摄影装置滑动设置在搭载杆上。
6.进一步地,所述上搭载机构包括设置在桥面吊机本体上部的第一横梁以及用于控制搭载杆升降的第一提升装置,所述第一提升装置设置在第一横梁上。
7.进一步地,所述下搭载机构包括设置在桥面吊机本体下部的第二横梁,所述第二横梁远离桥面吊机本体一端设置有用于固定搭载杆的固定装置。
8.进一步地,所述固定装置包括设置在第二横梁端部的固定套和设置在第二横梁内部的自动插拔销,所述搭载杆设置在固定套中,所述搭载杆的上部和下部分别开设有第一固定孔和第二固定孔,所述固定套开设有第三固定孔,所述自动插拔销用于通过第三固定孔伸入第一固定孔或第二固定孔中对搭载杆进行固定。
9.进一步地,所述搭载装置设置在桥面吊机本体两侧,所述上搭载机构还包括第一支撑座和第一折转装置,所述下搭载机构还包括第二支撑座和第二折转装置,所述第一支撑座和第二支撑座均固定在桥面吊机本体上,所述第一横梁一端与第一支撑座铰接,所述第二横梁一端与第二支撑座铰接,所述第一折转装置和第二折转装置用于控制第一横梁和
第二横梁同步转动。
10.进一步地,所述辅助挂索装置包括固定在桥面吊机本体上的支架、设置在支架上的第三折转装置以及滑动设置在第三折转装置上的起吊装置,所述起吊装置用于通过起吊斜拉索辅助完成斜拉索的梁端挂索,所述第三折转装置用于将起吊装置折出支架和折回支架。
11.进一步地,所述折转装置包括驱动装置、沿桥梁长度方向布置的轨道梁以及平行布置的两个外伸横梁,两个所述外伸横梁的一端均与支架铰接,两个所述外伸横梁的另一端分别与轨道梁的两端铰接,所述起吊装置滑动设置在轨道梁上,所述驱动装置用于控制外伸横梁的转动。
12.进一步地,所述辅助挂索装置还包括设置在支架上方的立柱、第一斜拉杆,所述立柱底部固定在支架上,所述第一斜拉杆一端与立柱顶部铰接,另一端与轨道梁的铰接点铰接,所述轨道梁的铰接点为外伸横梁和轨道梁的连接处。
13.进一步地,所述辅助挂索装置还包括第二斜拉杆,所述第二斜拉杆与第一斜拉杆相对设置,所述第二斜拉杆一端与立柱顶部铰接,另一端与支架铰接。
14.本实用新型的有益效果:
15.1.本实用新型通过将搭载装置和辅助挂索装置设置在桥面吊机上,实现了桥面吊机测量、对位、挂索一体化作业,可有效的减少桥面吊机操作人员、监护人员必要的作业中断时间,节省梁面挂索作业班组作业人员,降低人力资源成本,优化梁面作业班组管理,施工效率高。
16.2.本实用新型通过设置上搭载机构控制搭载杆的升降,摄影装置通过第二提升装置在搭载杆上竖向移动,测量距离的调整范围广,实现了一套装置对已架梁和待架梁多个点位的测量,测量效率高;通过设置下搭载机构对搭载杆进行固定,下搭载机构包括固定套和自动插拔销,固定套能够使得搭载杆仅能沿竖直方向上移动,对水平向进行了限位,自动插拔销通过插入搭载杆的固定孔中,对搭载杆进一步固定,能够减少摄影装置在测量过程中的摆动,提高测量精度,有利于提高待架梁与已架梁的拼接质量。
17.3.本实用新型通过设置可控制摄影装置移动的搭载装置,无需使用人工进行测量,设备操作人员可在桥面吊机的司机室内操作摄影装置,保证了施工人员的安全。
18.4.本实用新型的辅助挂索装置通过设置第一斜拉杆和第二斜拉杆,提高了轨道梁的起吊能力,使得辅助挂索装置能够完成塔区短索、中长索、长索施工。
19.5.本实用新型的搭载装置和辅助挂索装置均可向桥面吊机内侧折转,桥面吊机行走时可有效的避开已挂索,减少了对施工现场的干扰。
20.6.本实用新型的辅助挂索装置位于桥面吊机的尾部,可有效降低整机行走配重,增加桥面吊机行走过跨的稳定性。
附图说明
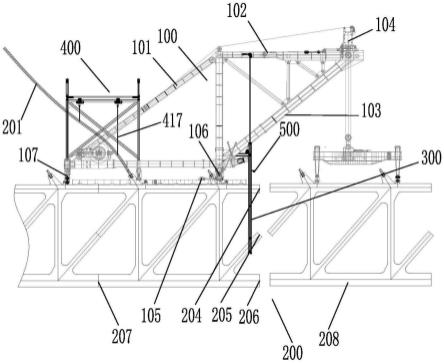
21.图1为本实用新型的使用状态侧视图;
22.图2为本实用新型的使用状态正视图;
23.图3为本实用新型的行走状态侧视图;
24.图4为本实用新型的行走状态正视图;
25.图5为本实用新型上搭载机构的正视图;
26.图6为本实用新型上搭载机构的俯视图;
27.图7为本实用新型下搭载机构的正视图;
28.图8为本实用新型下搭载机构的俯视图;
29.图9为本实用新型下搭载机构的侧视图;
30.图10为本实用新型的起吊装置折出支架时的结构示意图;
31.图11为图10中a处放大图;
32.图12为本实用新型的折转装置和支架的俯视图;
33.图13为本实用新型的起吊装置折回支架时的结构示意图;
34.附图标记说明:
35.桥面吊机本体100;主桁架101;上部框架102;前撑杆103;提升系统104;行走装置105;支撑装置106;锚固装置107;
36.斜拉桥200;斜拉索201;上层桥面202;下层桥面203;上弦杆204;斜杆205;下弦杆206;已架梁207;待架梁208;
37.搭载装置300;上搭载机构301;下搭载机构302;搭载杆303;耳板304;第一提升装置305;第二提升装置306;第一横梁307;第一支撑座308;第二横梁309;第二支撑座310;固定套311;自动插拔销312;第一固定孔313;第二固定孔314;第三固定孔315;第一折转装置316;第二折转装置317;
38.辅助挂索装置400;支架401;第三折转装置402;起吊装置403;轨道梁404;外伸横梁405;立柱406;第一斜拉杆407;安装座408;竖轴409;轴套410;连接板411;套筒412;补强板413;封板414;第二斜拉杆415;驱动装置416;吊带417;
39.摄影装置500。
具体实施方式
40.下面将结合附图和具体实施例对本实用新型作进一步的详细说明。
41.如图1、2所示,为该桥面吊机使用在公铁两用斜拉桥200上的使用状态图,公铁两用斜拉桥200的节段梁包括上层桥面202和下层桥面203,所述上层桥面202沿长度方向的两侧设置有上弦杆204,所述下层桥面203沿长度方向的两侧设置有下弦杆206,所述上弦杆204和下弦杆206之间设置有斜杆205,该节段梁进行对接时需要进行四次测量对位,分别为待架梁208的初步对位、下弦杆206的精确对位、斜杆205的精确对位以及上弦杆204的精确对位。
42.本实用新型提供一种具备智能对位与辅助挂索功能的桥面吊机实现节段梁的测量、对位、挂索一体化施工,该桥面吊机包括用于起吊待架梁208的桥面吊机本体100、设置在桥面吊机本体100上的辅助挂索装置400和搭载装置300,所述搭载装置300上设置有用于测量的摄影装置500,所述摄影装置500滑动设置在搭载装置300上,所述辅助挂索装置400用于辅助完成斜拉索201的梁端挂索。
43.具体地,所述桥面吊机本体100包括设置在已架梁207上的主桁架101,所述主桁架101底部设置有行走装置105,所述行走装置105用于控制桥面吊机本体100在桥面上的移动,所述主桁架101顶部为上部框架102,所述上部框架102前端设置有用于提升待架梁208
的提升系统104,所述主桁架101底部前端设置有支撑装置106,所述支撑装置106用于支撑桥面吊机本体100以及桥面吊机提升的待架梁208的重量,所述主桁架101底部后端设置有锚固装置107,所述锚固装置107用于保证桥面吊机的稳定性。
44.在一些实施例中,所述辅助挂索装置400设置有两个,分别在桥面吊机尾部的两侧,即锚固装置107上方能够辅助完成斜拉桥200两侧斜拉索201的梁端挂索,能够有效降低桥面吊机的行走配重,增加桥面吊机行走过跨的稳定性。所述搭载装置300设置在桥面吊机本体100靠近已架梁207和待架梁208对接处,能够控制摄影装置500进行对接前的测量工作,以提高对接的精度和效率。
45.所述搭载装置300包括上搭载机构301和下搭载机构302,所述上搭载机构301设置在下搭载机构302上方,所述上搭载机构301上吊有搭载杆303,所述上搭载机构301用于控制搭载杆303的升降,所述下搭载机构302用于固定搭载杆303,所述摄影装置500滑动设置在搭载杆303上。
46.所述上搭载机构301能够控制搭载杆303在第一工位和第二工位之间移动,所述第一工位为摄影装置500进行初步对位测量的位置,所述第二工位为摄影装置500进行下弦杆206、斜杆205以及上弦杆204的测量位置,从而实现多点位的测量。所述下搭载机构302主要对搭载杆303起到固定的作用,防止搭载杆303晃动对测量结果产生较大的影响。
47.如图5所示,所述上搭载机构301包括设置在桥面吊机本体100上部的第一横梁307以及用于控制搭载杆303升降的第一提升装置305,所述第一提升装置305设置在第一横梁307上。
48.具体地,所述第一提升装置305为电动葫芦,所述电动葫芦能在第一横梁307上移动,所述第一提升装置305通过钢丝绳与所述搭载杆303一端连接。
49.如图7、9所示,所述下搭载机构302包括设置在桥面吊机本体100下部的第二横梁309,所述第二横梁309远离桥面吊机本体100一端设置有用于固定搭载杆303的固定装置。
50.具体地,所述固定装置包括设置在第二横梁309端部的固定套311和设置在第二横梁309内部的自动插拔销312,所述搭载杆303设置在固定套311中,所述搭载杆303的上部和下部分别开设有第一固定孔313和第二固定孔314,所述固定套311开设有第三固定孔315,所述自动插拔销312用于通过第三固定孔315伸入第一固定孔313或第二固定孔314中对搭载杆303进行固定。
51.所述固定套311与搭载杆303同轴,使得固定套311能套在搭载杆303中,所述固定套311能限制搭载杆303的水平运动,所述自动插拔销312能够对搭载杆303进一步固定,减小搭载杆303的晃动,减小摄影装置500的测量误差,当自动插拔销312插入搭载杆303的第一固定孔313中时,此时搭载杆303离已架梁207和待架梁208的距离较远,摄影装置500进行初步测量,作业人员根据初步测量结果通过桥面吊机控制待架梁208进行初步对位,当自动插拔销312插入搭载杆303的第二固定孔314中时,此时搭载杆303离已架梁207和待架梁208的距离较近,摄影装置500通过在搭载杆303上上下移动,可以测量已架梁207和待架梁208之间的上弦杆204、斜杆205以及下弦杆206的偏差,并进行精确对位。
52.所述自动插拔销312通过油缸控制伸出和缩回,所述自动插拔销312靠近固定套311一端设置有接近开关,所述接近开关用于检测第一固定孔313或第二固定孔314是否与第三固定孔315对齐,当接近开关未检测到搭载杆303时,即为第一固定孔313或第二固定孔
314已经与第三固定孔315对齐,此时可控制自动插拔销312伸出。
53.如图6、8所示,所述搭载装置300设置在桥面吊机本体100两侧,所述上搭载机构301还包括第一支撑座308和第一折转装置316,所述下搭载机构302还包括第二支撑座310和第二折转装置317,所述第一支撑座308和第二支撑座310均固定在桥面吊机本体100上,所述第一横梁307一端与第一支撑座308铰接,所述第二横梁309一端与第二支撑座310铰接,所述第一折转装置316和第二折转装置317用于控制第一横梁307和第二横梁309同步转动。
54.具体地,所述第一支撑座308焊接在上部框架102上,所述第二支撑座310焊接在桥面吊机前撑杆103的下部,所述第一折转装置316包括第一油缸,所述第一油缸一端通过耳板304与桥面吊机连接,另一端通过耳板304与第一横梁307连接,所述第一油缸的两端均与耳板304铰接,所述第一折转装置316用于控制第一横梁307向桥面吊机外侧或内侧折转。所述第二折转装置317包括第二油缸,所述第二油缸一端通过耳板304与第二支撑座310连接,另一端通过耳板304与第二横梁309连接,所述第二油缸的两端均与耳板304铰接,所述第二折转装置317用于控制第二横梁309向桥面吊机外侧或内侧折转。
55.可以理解的是,当搭载装置300伸出和收回桥面吊机的过程中,所述第一油缸和第二油缸同步伸缩,以保证第一横梁307和第二横梁309同步转动,从而使得搭载杆303整体伸出或收回桥面吊机。所述第一油缸和第二油缸的活塞杆缩回后,第一横梁307垂直于第一支撑座308,第二横梁309垂直于第二支撑座310,第一横梁307和第二横梁309均平行于桥梁长度方向,此时搭载杆303靠近桥面吊机本体100的立柱406,不会对现场施工设备产生干扰;所述第一油缸和第二油缸的活塞杆伸出后,第一横梁307和第二横梁309折转90
°
,第一横梁307平行于第一支撑座308,第二横梁309平行于第二支撑座310,第一横梁307和第二横梁309均垂直于桥梁长度方向且位于桥梁两侧,此时可以利用电动葫芦控制搭载杆303的移动进行待架梁208的初步定位。所述第一油缸与第一横梁307之间不平行,所述第二油缸与第二横梁309之间不平行。
56.所述搭载杆303上设置有滑道,所述滑道用于使摄影装置500沿滑道竖向滑动,所述搭载杆303上设置有第二提升装置306,所述第二提升装置306用于控制摄影装置500的滑动。
57.具体地,所述第二提升装置306为电动绞盘,所述电动绞盘配双卷筒,摄影装置500通过第一安装座408滑动设置在搭载杆303靠近待架梁208一侧,所述第一安装座408上端和下端的钢丝绳分别绕在各自卷筒上,从而实现摄影装置500的上升和下降,电动绞盘通过第二安装座408安装在搭载杆303上,所述第二安装座408焊接在搭载杆303远离待架梁208一侧。
58.如图10所示,所述辅助挂索装置400包括固定在桥面吊机本体100上的支架401、设置在支架401上的第三折转装置402以及滑动设置在第三折转装置402上的起吊装置403,所述起吊装置403用于通过起吊斜拉索201辅助完成斜拉索201的梁端挂索,所述第三折转装置402用于将起吊装置403折出支架401和折回支架401,图10示出了折出支架401的情况,图13示出了折回支架401的情况。
59.具体地,辅助挂索装置400设置有两个,分别位于桥面吊机上的两侧,能够辅助完成斜拉桥200两侧斜拉索201的梁端挂索,所述支架401为钢结构,通过法兰与桥面吊机本体
100下部固定连接。所述支架401用于支撑第三折转装置402和起吊装置403,使得起吊装置403位于一定的高度以吊起斜拉索201,由于节段梁上施工机具众多,作业面狭小,因此设置了第三折转装置402,所述第三折转装置402能够将起吊装置403向支架401外侧折出,从而实现起吊装置403对斜拉索201的起吊,所述第三折转装置402还能将起吊装置403向支架401内侧折回,即向桥面吊机内侧折转,以减少对其他施工机具的影响以及避开已挂索,节省了现场作业空间,减少了各作业间的扰动,有利于提高作业效率。所述起吊装置403为电动葫芦,设置有两个,电动葫芦通过吊带417与斜拉索201连接。
60.如图12所示,所述第三折转装置402包括驱动装置416、沿桥梁长度方向布置的轨道梁404以及平行布置的两个外伸横梁405,两个所述外伸横梁405的一端均与支架401铰接,两个所述外伸横梁405的另一端分别与轨道梁404的两端铰接,所述起吊装置403滑动设置在轨道梁404上,所述驱动装置416用于控制外伸横梁405的转动。
61.支架401、两个外伸横梁405、轨道梁404共同形成了四杆机构,在驱动装置416的作用下,两个外伸横梁405同时转动,从而实现轨道梁404以及轨道梁404上的起吊装置403折出支架401和折回支架401,所述起吊装置403能够在轨道梁404上移动,在起吊装置403与斜拉索201连接后能够带动斜拉索201在高度方向以及沿桥梁长度方向移动,从而调整斜拉索201的梁端锚具角度与索道管角度一致,便于斜拉索201的梁端锚具插入索道管内。
62.所述支架401上方设置有用于提高轨道梁404起吊能力的拉力机构。
63.由于目前在建的大跨径公铁两用的钢桁斜拉桥200,斜拉索201长超过700m,单根斜拉索201重超过100t,塔区短索施工对起吊装置403起吊能力要求较低,而中长索、长索施工对起吊装置403起吊能力要求较高,因此需要在支架401上方设置拉力机构,所述拉力机构能够减小支架401的弯矩和变形,提高了轨道梁404的起吊能力,也提高了辅助挂索装置400的安全性。
64.所述拉力机构包括设置在支架401上方的立柱406和第一斜拉杆407,所述立柱406底部固定在支架401上,所述第一斜拉杆407一端与立柱406顶部铰接,另一端与轨道梁404的铰接点铰接,所述轨道梁404的铰接点为外伸横梁405和轨道梁404的连接处。
65.在起吊斜拉索201时,两个外伸横梁405与轨道梁404的铰接处为薄弱处,设置第一斜拉杆407能够提高所述四杆机构的稳定性,也能提高轨道梁404的起吊能力,在第三折转装置402转动过程中,所述第一斜拉杆407也能随之转动。
66.所述立柱406顶部设置有安装座408,所述安装座408内设置有竖轴409,所述竖轴409外套设有可绕竖轴409旋转的轴套410,所述轴套410与第一斜拉杆407的一端连接。
67.如图11所示,所述第一斜拉杆407包括连接板411和套在连接板411外的套筒412,所述套筒412一端与与轨道梁404的铰接点铰接,另一端开口,所述连接板411一端通过套筒412的开口伸出套筒412并与立柱406铰接,即通过与轴套410焊接从而实现与立柱406的铰接,所述连接板411位于套筒412内的一端与套筒412焊接,所述套筒412的开口处设置有用于密封套筒412的封板414,防止雨水进入套筒412内,所述连接板411还焊接有补强板413,由于连接板411与轴套410焊接处为第一斜拉杆407的应力集中处,因此设置了补强板413,补强板413与轴套410焊接,用于提高连接板411与轴套410焊接处的强度。
68.所述第一斜拉杆407通过设置在一端的连接板411与轴套410斜交焊接,当第三折转装置402转动时,所述第一斜拉杆407以竖轴409为转动轴进行旋转。
69.所述支架401上方还设置有第二斜拉杆415,所述第二斜拉杆415与第一斜拉杆407相对设置,所述第二斜拉杆415一端与立柱406顶部铰接,另一端与支架401铰接。
70.所述第二斜拉杆415设置在支架401靠内一侧,所述第一斜拉杆407设置在支架401靠外一侧,所述第一斜拉杆407和第二斜拉杆415分别将立柱406向相反的方向拉伸,第二斜拉杆415能够平衡第一斜拉杆407对立柱406的拉力,提高立柱406的刚度。
71.所述驱动装置416包括折转油缸,所述折转油缸的尾部与支架401铰接,所述折转油缸的活塞杆端部与外伸横梁405铰接,所述折转油缸与外伸横梁405之间不平行。
72.所述外伸横梁405可向支架401外侧折转至与支架401垂直,所述外伸横梁405可向支架401内侧折转至与支架401平行。
73.所述外伸横梁405包括第一外伸横梁和第二外伸横梁,所述折转油缸包括设置在支架401上方的第一折转油缸和设置在支架401外侧的第二折转油缸,所述第一折转油缸和第二折转油缸分别布置在支架401沿桥梁长度方向的两侧,所述第一折转油缸一端与支架401顶部铰接,另一端与第一外伸横梁铰接,所述第二折转油缸一端通过耳板304与支架401侧面铰接,另一端与第二外伸横梁铰接。
74.通过将第一折转油缸和第二折转油缸分别设置在四杆机构的内侧和外侧,能够实现两个外伸横梁405的90
°
同步转动。
75.所述支架401与外伸横梁405之间还连接有防止外伸横梁405转动的紧固装置,可以理解的是,当起吊装置403起吊斜拉索503时,若此时起吊装置403在轨道梁404上移动,则会给外伸横梁405施加水平作用力,使得外伸横梁405有向支架401内侧转动的趋势,通过紧固装置能够阻止外伸横梁405的转动,提高起吊斜拉索503时外伸横梁405的稳定性,虽然第一折转油缸和第二折转油缸能够对外伸横梁405进行锁紧,防止外伸横梁405转动,但是增加紧固装置有利于进一步提高外伸横梁405的稳定性。
76.该桥面吊机的工作流程分为待架梁208对位拼接和挂索:
77.待架梁208对位拼接:如图3、4所示,初始状态下,搭载装置300为收回状态,即第一横梁307和第二横梁309均平行于桥梁长度方向,即搭载杆303靠近桥面吊机立柱406,自动插拔销312插入搭载杆303下部的第二固定孔314中固定搭载杆303;
78.同步启动第一折转装置316和第二折转装置317,控制第一横梁307和第二横梁309同步转动90
°
,第一横梁307和第二横梁309向桥面吊机外侧折转,此时搭载杆303处于第一工位,两个搭载杆303分别位于桥面吊机外的两侧,并且搭载杆303的顶端靠近电动葫芦;
79.通过电动绞盘控制摄影装置500移动至第一测量工位,即靠近搭载杆303下部的位置,使得已架梁207和待架梁208的上弦杆204的标靶进入摄影装置500的焦距范围内(20m范围内),摄影装置500测量待架梁208的标靶相对于已架梁207标靶的位移与角度坐标,测量系统计算出待架梁208的位移与角度调整参数,桥面吊机将待架梁208引导到初定位精度位置,使得待架梁208和已架梁207之间的偏差进入摄影装置500可精确测量的范围内。
80.自动插拔销312收回,使得搭载杆303能够竖向移动,电动葫芦控制搭载杆303移动至搭载杆303上部的第一固定孔313与固定套311的第三固定孔315同轴的位置,当接近开关未检测到搭载杆303时,自动插拔销312伸出依次穿过第三固定孔315和第一固定孔313,对搭载杆303进行固定。
81.电动绞盘控制摄影装置500移动至待架梁208下弦杆206上方5-8m处,使得摄影装
置500能够精确测量已架梁207和待架梁208下弦杆206的偏差,摄影装置500通过已架梁207和待架梁208下弦杆206上的标靶,对待架梁208相对于已架梁207下弦杆206标靶的位移与角度坐标,测量系统计算出待架梁208的位移与角度调整参数控制桥面吊机将待架梁208的下弦杆206与已架梁207的下弦杆206进行精确对位拼接;
82.同理,电动绞盘控制摄影装置500依次移动至待架梁208斜杆205上方5-8m处和上弦杆204上方5-8m处,分别进行待架梁208斜杆205与已架梁207斜杆205的对位拼接以及待架梁208上弦杆204与已架梁207上弦杆204的对位拼接。
83.自动插拔销312收回,电动葫芦控制搭载杆303移动至初始位置,搭载杆303的初始位置为搭载杆303下部的第二固定孔314与固定套311的第三固定孔315同轴时搭载杆303的位置,当接近开关未检测到搭载杆303时,自动插拔销312再次伸出固定搭载杆303,第一折转装置316和第二折转装置317控制搭载杆303向桥面吊机内侧折转90
°
。
84.待架梁208挂索:完成待架梁208对位拼接后,两个折转油缸的活塞杆同时收回,使外伸横梁405向桥面吊机前方折转,可避开已架梁207上的已挂斜拉索201,桥面吊机行走至待架梁208上后,通过钢丝绳连续牵引装置将斜拉索201牵引到辅助挂索装置400下部,辅助挂索装置400的起吊装置403下放,并通过吊带417起吊斜拉索201,通过两个起吊装置403在轨道梁404上纵向移动和调整斜拉索201的起吊高度,调整斜拉索201梁端锚具角度与索道管角度一致,插入索道管内,与索道管内的梁端锚固装置107连接在一起完成梁端挂索施工。
85.以上显示和描述了本实用新型的基本原理和主要结构特征。本实用新型不受上述实例的限制,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型的范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1