一种模块式变角悬臂运输器、运输机及升降机的制作方法
1.本实用新型属于运输装置或升降机技术领域,具体涉及一种模块式变角悬臂运输器、运输机及升降机。
背景技术:
2.随着城市化进程越来越快,对于土地的需求也越来越大,而立体化的使用土地是提高土地利用率非常有效的手段,随着立体化工厂和立体化实验室等建筑物数量的逐渐增加,如何让设备和货物等高效进场成了亟待解决的问题,例如,大型实验仪器搬运进实验室,机床在多层厂房的进出等。
3.发明人发现,在解决设备和货物等高效进场问题时,现采用的普通机械存在以下问题:普通的升降机或吊车起吊占比太大,在满足多平面和多角度位置调节是,其结构不够紧凑,体积较大,在有限空间内很难满足起吊高度和设备的转场运输,高层实验室或大型生产厂房没有满足该要求的行车等起吊设备。
技术实现要素:
4.本实用新型为了解决上述问题,提出了一种模块式变角悬臂运输器、运输机及升降机,本实用新型结构紧凑,占用空间少,可以满足在有限空间内的转场运输需求。
5.根据一些实施例,本实用新型的第一方案提供了一种模块式变角悬臂运输器,采用如下技术方案:
6.一种模块式变角悬臂运输器,包括运输臂、升降架、环向调节机构、第一固定机构、水平转向机构、第二固定机构、驱动臂和伸缩机构;
7.所述运输臂与所述升降架固定,所述升降架远离所述运输臂的一侧与所述环向调节机构固定,所述环向调节机构远离所述升降架的一侧与所述第一固定机构,第一固定机构远离所述环向调节机构的一侧与所述水平转向机构固定,所述水平转向机构远离所述第一固定机构的一侧与所述第二固定机构连接,所述第二固定机构远离所述水平转向机构一侧的上端与所述驱动臂铰接;所述伸缩机构的一端与所述第二固定机构远离所述水平转向机构一侧的下端铰接,另一端与所述驱动臂远离所述第二固定机构一侧的下端铰接。
8.进一步的,所述运输臂为双叉运输臂,包括第一运输臂和第二运输臂。
9.进一步的,所述第一运输臂和第二运输臂均包括相互垂直固定的横梁和竖梁,所述竖梁远离所述横梁一侧的两端分别设置有轴孔和滑槽;所述升降架靠近所述双叉运输臂一侧的一端设置有滑动轴,另一端设置有滑轨;所述轴孔滑动套设在所述滑动轴上,所述滑槽与所述滑轨滑动连接。
10.进一步的,所述环向调节机构包括与所述升降架固定连接的内圈以及与所述第一固定机构固定连接的外圈;所述内圈与所述外圈转动连接,所述内圈连接有环向驱动装置。
11.进一步的,所述水平转向机构包括与所述第一固定机构固定连接的转轴、固定在所述转轴上的齿轮、与所述齿轮啮合的齿条以及与所述齿条连接的水平转向驱动装置;所
述第二固定机构与所述转轴铰接;所述水平转向驱动装置与所述第二固定机构固定连接。
12.进一步的,所述驱动臂远离所述第二固定机构的一端固定连接有连接器。
13.进一步的,所述第二固定机构的上端设置有水平仪和报警装置。
14.进一步的,所述驱动臂的上端设置有摄像头,所述升降架的外侧设置有距离传感器。
15.根据一些实施例,本实用新型的第二方案提供了一种运输机,采用如下技术方案:
16.一种运输机,包括运输机本体以及如第一方案中所述的模块式变角悬臂运输器,所述模块式变角悬臂运输器通过连接器与所述运输机本体连接。
17.根据一些实施例,本实用新型的第三方案提供了一种升降机,采用如下技术方案:
18.一种升降机,包括升降机本体以及如第一方案中所述的模块式变角悬臂运输器,所述模块式变角悬臂运输器通过连接器与所述升降机本体连接。
19.与现有技术相比,本实用新型的有益效果为:
20.1、本实用新型中的运输器包括运输臂、升降架、环向调节机构、第一固定机构、水平转向机构、第二固定机构、驱动臂和伸缩机构,通过环向调节机构、水平转向机构和伸缩机构,能够进行多平面和多角度位置的调节,结构紧凑,应用到运输机或升降机,可以满足在有限空间内的转场运输或吊装等需求;
21.2、本实用新型安装有摄像头、水平仪、距离传感器和报警装置,具有障碍物距离自动检测及报警功能,能够实现高层实验室或大型生产厂房等工作场景的大型机械高效安全运输。
附图说明
22.构成本实用新型的一部分的说明书附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。
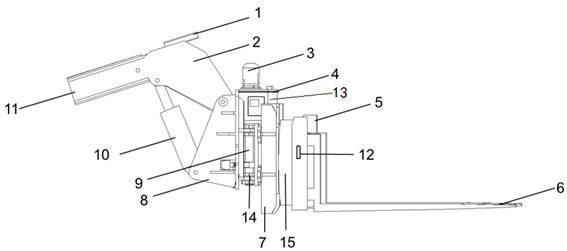
23.图1是本实用新型的结构示意图;
24.图2是本实用新型的环向调节部分三维结构示意图;
25.图3是本实用新型的水平转向部分三维结构示意图;
26.图4是本实用新型的控制电路图;
27.其中:1、摄像头;2、驱动臂;3、电机;4、水平仪;41、预警灯;42、三色灯;5、升降架;51、滑动轴;52、滑轨;6、运输臂;61、第一运输臂;62、第二运输臂;63、横梁、64、竖梁;65、轴孔;66、滑槽;7、第一固定机构;8、第二固定机构;9、转轴;10、伸缩机构;11、连接器;12、距离传感器;13、控制箱;14、水平转向机构;141、齿轮;142、齿条;143、水平转向驱动装置;15、环向调节机构;151、内圈;152、外圈;153、环向驱动装置。
具体实施方式
28.下面结合附图与实施例对本实用新型作进一步说明。
29.应该指出,以下详细说明都是例示性的,旨在对本实用新型提供进一步的说明。除非另有指明,本文使用的所有技术和科学术语具有与本实用新型所属技术领域的普通技术人员通常理解的相同含义。
30.实施例1:
31.如图1所示,本实施例提供了一种模块式变角悬臂运输器,包括运输臂6、升降架5、环向调节机构15、第一固定机构7、水平转向机构14、第二固定机构8、驱动臂2和伸缩机构10;
32.所述运输臂6与所述升降架5固定,所述升降架5远离所述运输臂6的一侧与所述环向调节机构15固定,所述环向调节机15构远离所述升降架5的一侧与所述第一固定机构7,第一固定机构7远离所述环向调节机构15的一侧与所述水平转向机构14固定,所述水平转向机构14远离所述第一固定机构7的一侧与所述第二固定机构8连接,所述第二固定机构8远离所述水平转向机构14一侧的上端与所述驱动臂2铰接;所述伸缩机构10的一端与所述第二固定机构8远离所述水平转向机构14一侧的下端铰接,另一端与所述驱动臂2远离所述第二固定机构8一侧的下端铰接。
33.伸缩机构10可以选用气缸伸缩件、液压缸伸缩件或电缸伸缩件等,或其他常规伸缩结构,在此不再详述。
34.所述环向调节机构15可以实现对所述运输臂6在水平方向上的旋转动作,比如在竖直面内的实现360
°
翻转,所述水平转向机构14可以实现对所述运输臂6在竖直方向上的旋转动作,所述伸缩机构10的伸缩可以实现对所述运输臂6角度上的调节;通过水平方向上的旋转动作、竖直方向上的旋转动作和调节铰接,能够实现多平面和多角度位置调节的目的,且本实施例中的运输器结构紧凑,应用到运输机或升降机,可以满足在有限空间内的转场运输或吊装等需求。
35.所述运输臂6可以为双叉运输臂,具体的,所述运输臂6可以包括第一运输臂61和第二运输臂62。
36.如图2所示,所述第一运输臂61和第二运输臂62均包括相互垂直固定的横梁63和竖梁64,所述竖梁64远离所述横梁63一侧的两端分别设置有轴孔65和滑槽66;所述升降架5靠近所述双叉运输臂一侧的一端设置有滑动轴51,另一端设置有滑轨52;所述轴孔65滑动套设在所述滑动轴51上,所述滑槽66与所述滑轨52滑动连接。
37.具体的,所述横梁63可以设置在叉车等设备上的常规部件,可以在所述竖梁64远离所述横梁63一侧的上、下两端分别设置有轴孔65和滑槽66;所述滑轨52和所述滑槽66匹配,可以通过常规设置实现,比如采用t型滑轨和t型滑槽。
38.本实施例中,所述环向调节机构15可以采用常规设备,可以实现带动所述升降架5绕所述第一固定机构7转动即可;在一些实施例中,如图2所示,所述环向调节机构15可以包括与所述升降架5固定连接的内圈151以及与所述第一固定机构7固定连接的外圈152;所述内圈151与所述外圈152转动连接,所述内圈151连接有环向驱动装置153。
39.可以理解的,所述内圈151与所述外圈152的转动连接可以借鉴轴承等转动连接的结构实现,在所述外圈152与所述升降架5的连接位置预留驱动部,在驱动部上开设齿或直接焊接齿轮;所述环向驱动装置153可以包括直线电机以及连接到直线电机上的齿条,直线电机也可以采用其他直线驱动结构;所述直线电机可以固定在所述升降架5或所述外圈152上;开设的齿或直接焊接的齿轮与直线电机上的齿条啮合,当所述直线电机带动齿条移动时,可以带动所述内圈151转动,驱动所述升降架5和所述运输臂6作为一个整体绕所述第一固定机构7在水平方向转动。
40.如图3所示,所述水平转向机构14包括与所述第一固定机构7固定连接的转轴9、固定在所述转轴9上的齿轮141、与所述齿轮141啮合的齿条142以及与所述齿条142连接的水平转向驱动装置143;所述第二固定机构8与所述转轴9铰接;所述水平转向驱动143装置与所述第二固定机构8固定连接。在其他一些实施例中,还可以在所述控制箱13上安装电机3,所述电机3的输出轴与所述转轴9固定连接,通过所述电机3驱动所述转轴9转动。
41.所述水平转向驱动143设置为直线驱动机构,比如直线电机;可以理解的,所述水平转向驱动143驱动所述齿条142前后移动时,带动所述齿轮141转动,所述齿轮141带动所述转轴9转动,从而带动所述第一固定机构7、所述环向调节机构15、升降架5和运输臂6作为一个整体在竖直方向上绕所述第二固定机构8转动。
42.如图1和图2所示,本实施例中,当所述伸缩机构10伸长或缩短时,带动所述驱动臂2围绕所述第二固定机构8转动,使得所述驱动臂2和所述第二固定机构8之间的夹角变大或变小,从而实现所述第二固定机构8、所述水平转向机构14、所述第一固定机构7、所述环向调节机构15、升降架5和运输臂6作为一个整体绕所述驱动臂2的转动,实现角度调节。
43.所述驱动臂2远离所述第二固定机构8的一端固定连接有连接器11;所述连接器11可以采用常规部件,通过焊接或螺栓连接等方式与运输机或升降机等连接。
44.实施例2:
45.本实施例与实施例1不同之处在于,本实施例中添加了水平检测和测距等部件和功能,以及添加了报警装置及功能;
46.所述第二固定机构8的上端设置有水平仪4和报警装置,用于水平测量和报警;可以在所述第二固定机构8上端固定控制箱13,可以在控制箱13上固定水平仪4,所述报警装置可以包括预警灯41和三色灯42,所述预警灯41可以设置为声音报警,所述三色灯42可以设置为操作指示灯,不同颜色的指示灯可以代表不同工作状态,比如手动、自动和无动作等。所述驱动臂2的上端设置有摄像头1,用于进行视频监控;所述升降架5的外侧设置有距离传感器12,用于测量所述升降架5两侧的障碍物;所述摄像头1可以设置为高清监控探头。
47.具体的,如图2所示,可以将所述电机3、所述水平仪4、预警灯41、所述三色灯42、所述摄像头1和所述距离传感器12等连接到同一控制器plc;所述水平仪4可以采用fhvt116t,所述预警灯41可以采用sf-905-12/24vdc,所述三色灯42可以采用qijnqc50s-l-j,所述摄像头1可以采用毅廉锐4k,所述距离传感器12可以采用gllm02c-20,所述控制器plc可以采用西门子s7-200smart。
48.所述摄像头1,用于实时监测所述运输臂6的工作状态;所述水平仪4,用于监测运输过程中所述运输臂6是否水平;当所述距离传感器12监测到周边物体较近时,所述预警灯41与所述三色灯42工作。
49.实施例3:
50.本实例提供了一种运输机,包括运输机本体以及如实施例1或实施例2中所述的模块式变角悬臂运输器,所述模块式变角悬臂运输器通过连接器11与所述运输机本体连接;具体的,可以通过焊接、螺栓连接或其他常规连接方式,将所述连接器11与常规的运输机连接。
51.实施例4:
52.本实施例提供了一种升降机,包括升降机本体以及如实施例1或实施例2中所述的
模块式变角悬臂运输器,所述模块式变角悬臂运输器通过连接器11与所述升降机本体连接,具体的可以通过焊接、螺栓连接或其他常规连接方式,将所述连接器11与常规的升降机连接。
53.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1