一种铁环埋入系统的制作方法
本技术涉及铁环埋入领域,具体是一种铁环埋入系统。
背景技术:
1、现有技术中,铁环埋入过程具体的是会使用机器人夹具将作为嵌件的铁环进行夹持,然后操控机器人夹具将铁环移动到上料工装一侧,接着驱动机器人夹具持续工作将带有铁环的嵌件放入作为产品的埋入件中,然后通过检测工装进行铁环和埋入件的定位检测,检测好后再通过机械夹具将铁环和埋入件合并的工件转运到传送带上,完成铁环埋入的系统性的作业。
2、现有的铁环埋入系统在工作时由于通过机器人夹具运送铁环和埋入件,在运送的过程中若操作人员不注意观察、且其他人员位于机器人夹具的工作区域中,可能会造成其他人员被机器人打击受伤,不利于安全生产。
技术实现思路
1、本实用新型的目的在于提供一种铁环埋入系统,以解决上述背景技术中提出的问题。
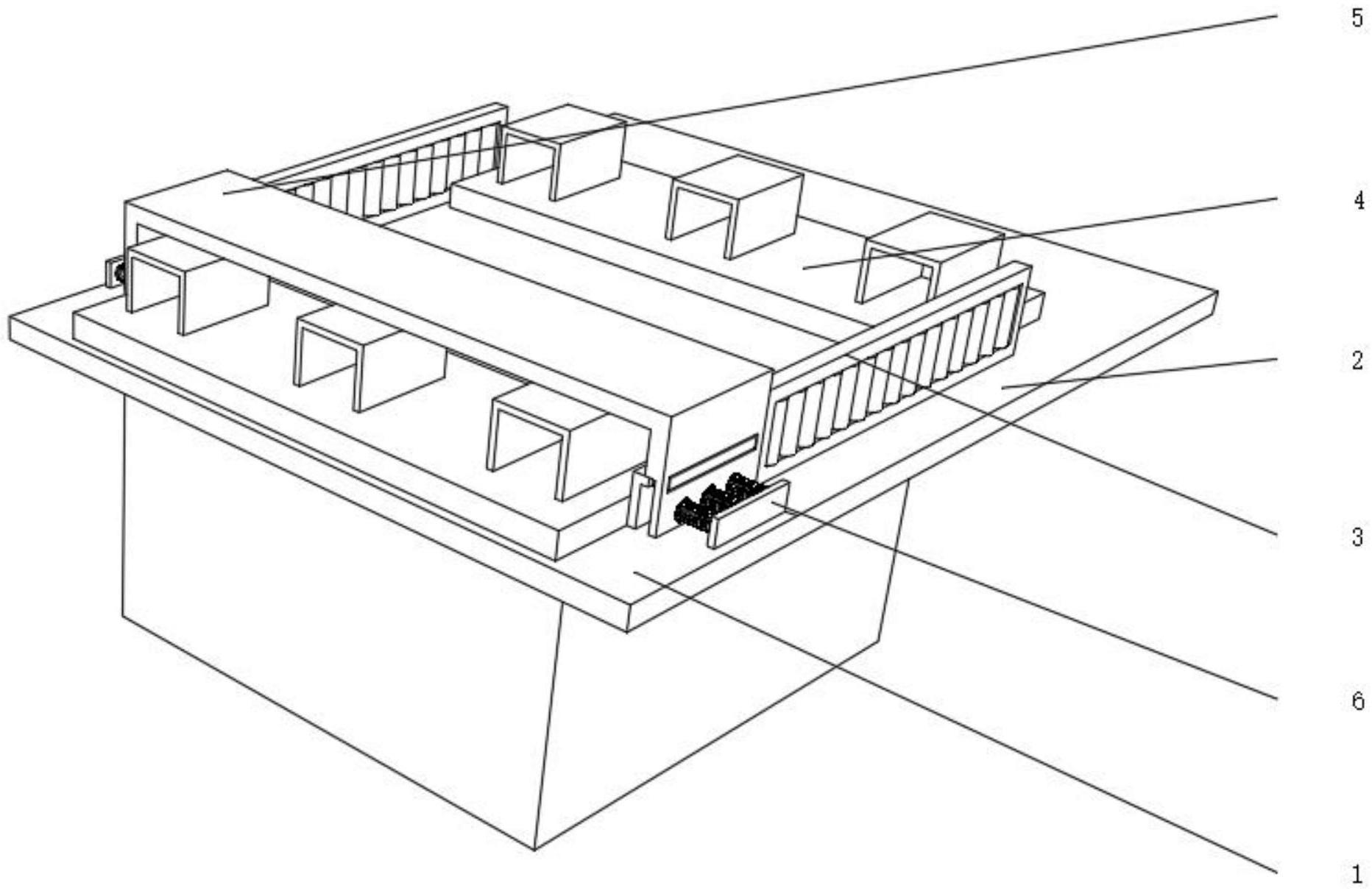
2、为实现上述目的,本实用新型提供如下技术方案:一种铁环埋入系统,包括工作台和圆角;所述工作台的一侧设置有传送台,所述工作台和传送台的内部均设置有埋入件,所述工作台的一侧固接有稳定轨,所述稳定轨的内部设置有卡位机构,所述卡位机构包括卡板、固定板、弹簧、近接开关和蜂鸣器,所述固定板与工作台固接,所述弹簧的一端与固定板固接、另一端与卡板固接,所述近接开关与稳定轨固接,所述圆角与近接开关活动连接,所述蜂鸣器与近接开关电性连接。
3、作为本实用新型再进一步的方案:所述稳定轨的一侧固接有导排,所述导排的内部转动连接有转辊。
4、作为本实用新型再进一步的方案:所述卡位机构共设置有两组且均分在稳定轨的两侧。
5、作为本实用新型再进一步的方案:所述卡板的两侧均开设有圆角。
6、作为本实用新型再进一步的方案:所述导排共设置有两组且均分在稳定轨的两侧。
7、作为本实用新型再进一步的方案:所述弹簧共设置有六个,六个所述弹簧均分为两组。
8、与现有技术相比,本实用新型的有益效果是:
9、1、在埋入件进入稳定轨的内部时,埋入件会与卡板接触并挤压卡板,卡板被挤压后会带动弹簧压缩并使其一侧接触近接开关,当近接开关启动后会带动蜂鸣器发出蜂鸣,提醒人员铁环将预备埋入埋入件内,然后在埋入件不与卡位机构接触的过程中弹簧会带动圆角远离近接开关,使得近接开关不激发蜂鸣器鸣叫,在此过程中可通过鸣叫次数对埋入的工件进行计数,同时也可提醒人员远离工作区域,利于安全生产;
10、2、稳定轨可方便机器人夹具将铁环嵌件埋入埋入件中,解决埋入件位置不准导致铁环嵌件放置偏移的问题,通过使用机器人夹具将铁环嵌件和埋入件组成的工件进行转运,并且在传送台的作用下可实现埋入件持续的供给作业,有效提升了铁环埋入的效率。
技术特征:
1.一种铁环埋入系统,包括工作台(1)和圆角(66);其特征在于:所述工作台(1)的一侧设置有传送台(2),所述工作台(1)和传送台(2)的内部均设置有埋入件(4),所述工作台(1)的一侧固接有稳定轨(5),所述稳定轨(5)的内部设置有卡位机构(6),所述卡位机构(6)包括卡板(61)、固定板(62)、弹簧(63)、近接开关(64)和蜂鸣器(65),所述固定板(62)与工作台(1)固接,所述弹簧(63)的一端与固定板(62)固接、另一端与卡板(61)固接,所述近接开关(64)与稳定轨(5)固接,所述圆角(66)与近接开关(64)活动连接,所述蜂鸣器(65)与近接开关(64)电性连接。
2.根据权利要求1所述的一种铁环埋入系统,其特征在于,所述稳定轨(5)的一侧固接有导排(3),所述导排(3)的内部转动连接有转辊(31)。
3.根据权利要求2所述的一种铁环埋入系统,其特征在于,所述卡位机构(6)共设置有两组且均分在稳定轨(5)的两侧。
4.根据权利要求3所述的一种铁环埋入系统,其特征在于,所述卡板(61)的两侧均开设有圆角(66)。
5.根据权利要求4所述的一种铁环埋入系统,其特征在于,所述导排(3)共设置有两组且均分在稳定轨(5)的两侧。
6.根据权利要求5所述的一种铁环埋入系统,其特征在于,所述弹簧(63)共设置有六个,六个所述弹簧(63)均分为两组。
技术总结
本技术公开了一种铁环埋入系统,包括工作台和圆角;所述工作台的一侧设置有传送台,所述工作台和传送台的内部均设置有埋入件,所述工作台的一侧固接有稳定轨,所述稳定轨的内部设置有卡位机构,涉及铁环埋入领域。本技术在埋入件进入稳定轨的内部时,埋入件会与卡板接触并挤压卡板,卡板被挤压后会带动弹簧压缩并使其一侧接触近接开关,当近接开关启动后会带动蜂鸣器发出蜂鸣,提醒人员铁环将预备埋入埋入件内,然后在埋入件不与卡位机构接触的过程中弹簧会带动圆角远离近接开关,使得近接开关不激发蜂鸣器鸣叫,在此过程中可通过鸣叫次数对埋入的工件进行计数,同时也可提醒人员远离工作区域,利于安全生产。
技术研发人员:周民军
受保护的技术使用者:上海德广自动化科技有限公司
技术研发日:20221220
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!