一种对按配送机器人按驳出库物品的方法与流程
本发明属于机器人配送,具体涉及一种对按配送机器人按驳出库物品的方法。
背景技术:
1、对货物的配送和驳回,采用人工核对信息的方法,对所属物品进行分发和收回,或者通过机器人对所属的物品进行发放,再由人力完成需要驳回的货物。
2、现有的配送机器人,在货物出库时,没有自动接驳的功能和系统,用户商品的下单,等待商家发货时间漫长,往往需要通过商家后台进行操作,不能够实现全链路自动下单、配货、接驳以及配送的任务,效力低下,耗时长,因此亟需设计一种对按配送机器人按驳出库物品的方法来解决上述问题。
技术实现思路
1、本发明的目的在于提供一种对按配送机器人按驳出库物品的方法,以解决上述背景技术中提出的现有的配送机器人,在货物出库时,没有自动接驳的功能和系统,用户商品的下单,等待商家发货时间漫长,往往需要通过商家后台进行操作,不能够实现全链路自动下单、配货、接驳以及配送的任务,效力低下,耗时长的问题。
2、为实现上述目的,本发明提供如下技术方案
3、一种对按配送机器人按驳出库物品的方法:
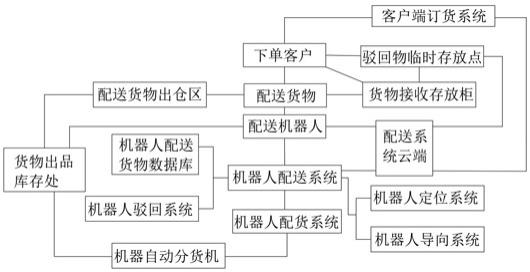
4、包括机器人配送系统,所述机器人配送系统装配在配送机器人上,所述机器人配送系统的输入端设置了机器人定位系统、机器人导向系统、机器人配送货物数据库和机器人驳回系统,所述机器人配送系统的输出端设置了机器人配货系统,所述机器人配货系统的通过网络连接机器自动分货机,所述机器自动分货机对货物出品库存处的货物进行分配,所述货物出品库存处的货物被分配到配送货物出仓区,所述配送货物出仓区的货物通过配送机器人进行配送货物,所述配送机器人会将送至下单客户或者货物接收存放柜处,所述下单客户将被驳回的货物送至配送货物或者存放在驳回物临时存放点上,所述下单客户需要在手机上下载客户端订货系统,所述下单客户通过客户端订货系统将下单货物发送至配送系统云端,配送系统云端通过将信息传输至机器人配送系统。
5、优选的,所述机器人定位系统装配在配送机器人的内部,所述机器人定位系统上设置了云端自定义程序、设备端感应器、机器人对接点位和网络传输系统,所述设备端感应器上设置了机械手臂和机器人仓室,所述机器人对接点位上设置了收纳仓点位、货物存放点位和驳回物件点位。
6、优选的,所述机器人配送系统会通过配送系统云端对所有客户的下单资料进行整合,并且确定到每一个下单客户所在的具体位置,所述机器人配送系统会将客户所有的下单资料整合存放在机器人配送货物数据库上。
7、优选的,所述机器人配送货物数据库上的数据会实时通过配送系统云端传输到客户的客户端订货系统上,让下单客户能够进行实时的观看,所述机器人配送货物数据库会通过机器人配送系统上的机器人配货系统对机器自动分货机发送指令,所述机器自动分货机在受到指令后,所述机器自动分货机通过机器人配送货物数据库上的数据将货物出品库存处上的货物分发至配送货物出仓区区域。
8、优选的,所述下单客户对所需要退货的物品通过客户端订货系统和配送系统云端将指令传送至机器人配送系统,所述配送机器人通过机器人配送系统接收到指令后过机器人定位系统确定自身位置,再通过机器人导向系统对所需要退回的物品进行定点导向,所述配送机器人繁忙时,配送机器人在机器人配送系统的辅助下通过配送系统云端向客户端订货系统发送一个存放在驳回物临时存放点的指令,所述下单客户通过客户端订货系统上存放在驳回物临时存放点的指令,对物品进行定点存放。
9、优选的,所述配送机器人通过机器人配送系统内部的信息对配送货物出仓区上的货物进行再分配,所述配送机器人根据下单客户的要求信息将配送货物运输至下单客户住处或者货物接收存放柜处,所述配送机器人等待下单客户确认收单后,所述机器人配送系统自动确定订单交易的完成。
10、优选的,所述货物接收存放柜内部存放的被驳回物品会通过配送系统云端将数据传送至机器人配送系统,所述机器人配送系统再通过机器人驳回系统对货物接收存放柜内部的数据进行进行统计,机器人驳回系统通过机器人配送系统对配送机器人下达收回指令,所述配送机器人将货物接收存放柜内部存放的物品统一收回存放回货物出品库存处。
11、优选的,所述配送机器人通过机器人定位系统对配送货物进行取出、存放以及运输等任务,所述设备端感应器的机械运动村从云端自定义程序的指令,所述云端自定义程序的指令通过机器人定位系统传送至配送机器人,所述机械手臂可将物品放置在机器人仓室内部。
12、优选的,所述机器人定位系统通过网络传输系统实现配送机器人对位置的精确导向,所述,云端自定义程序和设备端感应器实现了对机器人对接点位的精准把控,所述收纳仓点位和货物存放点位能够精准的找到收纳仓点位、货物存放点位和驳回物件点位的位置。
13、优选的,所述云端自定义程序对配送机器人的指向性程序后使得机器人导向系统的发生改变,所述机器人导向系统的输入端为下单客户和机器人配送系统,所述下单客户和机器人配送系统为机器人配送货物数据库和机器人驳回系统传送的数据,所述机器人导向系统通过机器人配送货物数据库和机器人驳回系统的数据为机器人配送系统提供解决方案和最优路线。
14、与现有技术相比,本发明的有益效果是:该机器人的配送方法通过机器人配送系统、机器人定位系统、机器人导向系统、和机器人驳回系统使得配送机器人、配送货物、和下单客户之间的信息紧密相连,下单客户能够实时的看到自己的配送货物,在整个配送系统中在配送和接驳的过程中,都无需人员的干涉,实现了无人操作式,自动下单、自动配货、自动接驳,省去了人工取货的时间,以及与送货的环节。
15、同时本发明在配送机器人上设置了机器人定位系统,设备端感应器和机器人对接点位之间相互配合,能够实现机器人在货仓上的自动取货移动昂自动放货,实现全自动取货、机器人取货位置规划、定位、取货以及送货的,提高了配送货物的效率。
技术特征:
1.一种对按配送机器人按驳出库物品的方法,其特征在于:包括机器人配送系统,所述机器人配送系统装配在配送机器人上,所述机器人配送系统的输入端设置了机器人定位系统、机器人导向系统、机器人配送货物数据库和机器人驳回系统,所述机器人配送系统的输出端设置了机器人配货系统,所述机器人配货系统的通过网络连接机器自动分货机,所述机器自动分货机对货物出品库存处的货物进行分配,所述货物出品库存处的货物被分配到配送货物出仓区,所述配送货物出仓区的货物通过配送机器人进行配送货物,所述配送机器人会将送至下单客户或者货物接收存放柜处,所述下单客户将被驳回的货物送至配送货物或者存放在驳回物临时存放点上,所述下单客户需要在手机上下载客户端订货系统,所述下单客户通过客户端订货系统将下单货物发送至配送系统云端,配送系统云端通过将信息传输至机器人配送系统。
2.根据权利要求1所述的一种对按配送机器人按驳出库物品的方法,其特征在于:所述机器人定位系统装配在配送机器人的内部,所述机器人定位系统上设置了云端自定义程序、设备端感应器、机器人对接点位和网络传输系统,所述设备端感应器上设置了机械手臂和机器人仓室,所述机器人对接点位上设置了收纳仓点位、货物存放点位和驳回物件点位。
3.根据权利要求1所述的一种对按配送机器人按驳出库物品的方法,其特征在于:所述机器人配送系统会通过配送系统云端对所有客户的下单资料进行整合,并且确定到每一个下单客户所在的具体位置,所述机器人配送系统会将客户所有的下单资料整合存放在机器人配送货物数据库上。
4.根据权利要求3所述的一种对按配送机器人按驳出库物品的方法,其特征在于:所述机器人配送货物数据库上的数据会实时通过配送系统云端传输到客户的客户端订货系统上,让下单客户能够进行实时的观看,所述机器人配送货物数据库会通过机器人配送系统上的机器人配货系统对机器自动分货机发送指令,所述机器自动分货机在受到指令后,所述机器自动分货机通过机器人配送货物数据库上的数据将货物出品库存处上的货物分发至配送货物出仓区区域。
5.根据权利要求4所述的一种对按配送机器人按驳出库物品的方法,其特征在于:所述下单客户对所需要退货的物品通过客户端订货系统和配送系统云端将指令传送至机器人配送系统,所述配送机器人通过机器人配送系统接收到指令后过机器人定位系统确定自身位置,再通过机器人导向系统对所需要退回的物品进行定点导向,所述配送机器人繁忙时,配送机器人在机器人配送系统的辅助下通过配送系统云端向客户端订货系统发送一个存放在驳回物临时存放点的指令,所述下单客户通过客户端订货系统上存放在驳回物临时存放点的指令,对物品进行定点存放。
6.根据权利要求5所述的一种对按配送机器人按驳出库物品的方法,其特征在于:所述配送机器人通过机器人配送系统内部的信息对配送货物出仓区上的货物进行再分配,所述配送机器人根据下单客户的要求信息将配送货物运输至下单客户住处或者货物接收存放柜处,所述配送机器人等待下单客户确认收单后,所述机器人配送系统自动确定订单交易的完成。
7.根据权利要求4所述的一种对按配送机器人按驳出库物品的方法,其特征在于:所述货物接收存放柜内部存放的被驳回物品会通过配送系统云端将数据传送至机器人配送系统,所述机器人配送系统再通过机器人驳回系统对货物接收存放柜内部的数据进行进行统计,机器人驳回系统通过机器人配送系统对配送机器人下达收回指令,所述配送机器人将货物接收存放柜内部存放的物品统一收回存放回货物出品库存处。
8.根据权利要求2所述的一种对按配送机器人按驳出库物品的方法,其特征在于:所述配送机器人通过机器人定位系统对配送货物进行取出、存放以及运输等任务,所述设备端感应器的机械运动村从云端自定义程序的指令,所述云端自定义程序的指令通过机器人定位系统传送至配送机器人,所述机械手臂可将物品放置在机器人仓室内部。
9.根据权利要求8所述的一种对按配送机器人按驳出库物品的方法,其特征在于:所述机器人定位系统通过网络传输系统实现配送机器人对位置的精确导向,所述,云端自定义程序和设备端感应器实现了对机器人对接点位的精准把控,所述收纳仓点位和货物存放点位能够精准的找到收纳仓点位、货物存放点位和驳回物件点位的位置。
10.根据权利要求9所述的一种对按配送机器人按驳出库物品的方法,其特征在于:所述云端自定义程序对配送机器人的指向性程序后使得机器人导向系统的发生改变,所述机器人导向系统的输入端为下单客户和机器人配送系统,所述下单客户和机器人配送系统为机器人配送货物数据库和机器人驳回系统传送的数据,所述机器人导向系统通过机器人配送货物数据库和机器人驳回系统的数据为机器人配送系统提供解决方案和最优路线。
技术总结
本发明属于机器人配送技术领域,具体涉及一种对按配送机器人按驳出库物品的方法,包括机器人配送系统,所述机器人配送系统装配在配送机器人上,所述机器人配送系统的输入端设置了机器人定位系统、机器人导向系统、机器人配送货物数据库和机器人驳回系统,所述机器人配送系统的输出端设置了机器人配货系统,所述机器人配货系统的通过网络连接机器自动分货机,所述机器自动分货机对货物出品库存处的货物进行分配。该该机器人的配送方法在整个配送系统中在配送和接驳的过程中,都无需人员的干涉,实现了无人操作式,自动下单、自动配货、自动接驳,省去了人工取货的时间,以及与送货的环节。
技术研发人员:罗拥军,丁伟,马进,徐志颖
受保护的技术使用者:江苏安方电力科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!