一种龙门吊自动吊装系统和方法与流程
本申请总体上涉及起重设备。更具体地,本申请涉及一种龙门吊自动吊装系统和方法。
背景技术:
1、随着我国经济的发展,大中型城市为了解决出行难的问题,规划和建设了众多的地铁项目。在地铁轨道掘进的过程中会产生大量渣土,需要使用龙门吊机构将大量渣土排出。当前,通过龙门吊机构控制渣土排出通常由人工执行。由于人工操作精度有限,在装卸和运输期间渣土箱难免产生晃动导致设备受损或渣土洒出。
2、因此,如何提供一种安全平稳的龙门吊自动吊装系统和方法是本领域技术人员亟待解决的问题。
技术实现思路
1、有鉴于此,本申请提供了一种龙门吊自动吊装系统,其无需人工操作即可自动吊装渣土箱并且平稳地将其中的渣土卸载到指定区域。本申请还提供了一种龙门吊自动吊装方法。
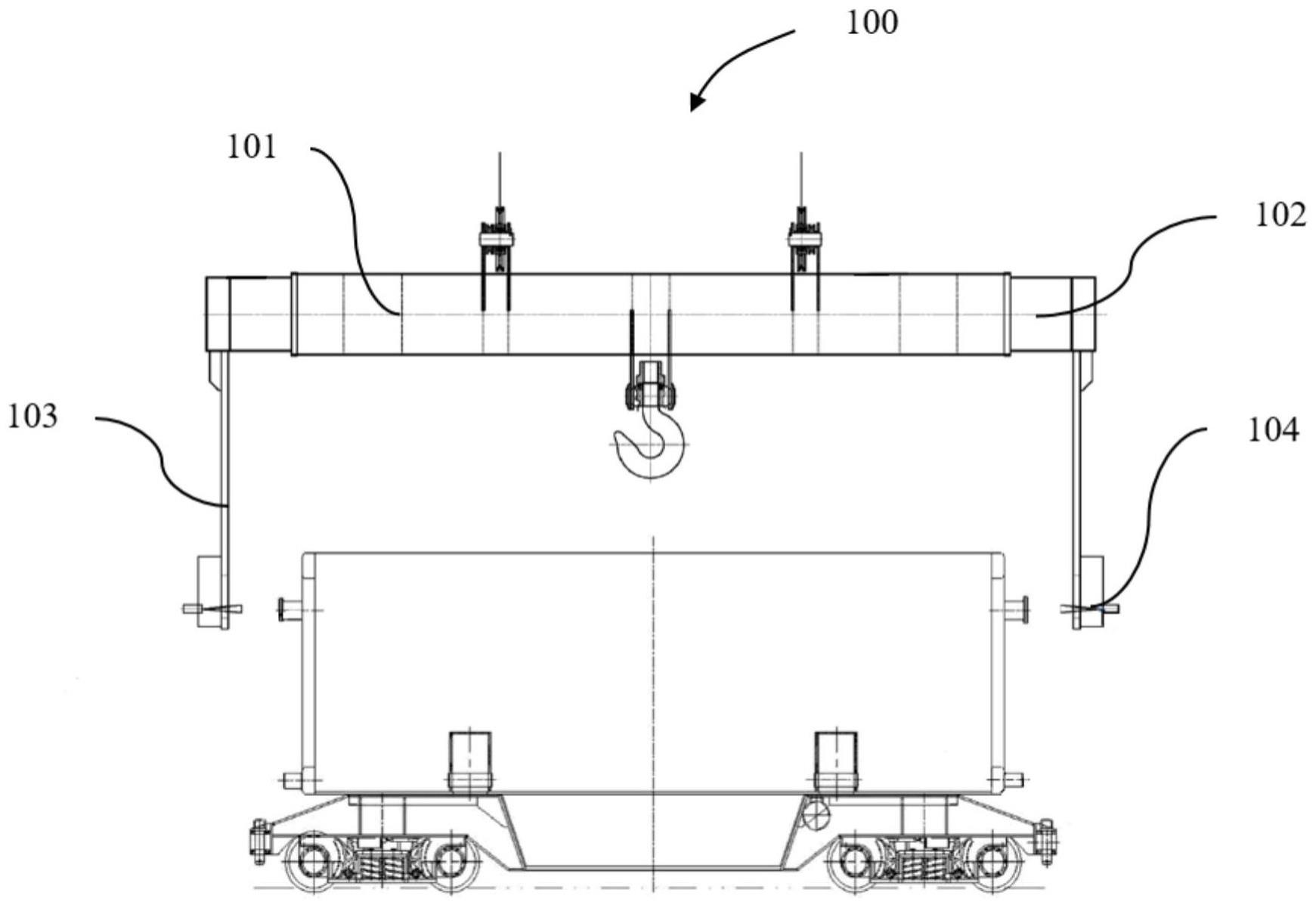
2、为达上述目的,本申请提供了一种龙门吊自动吊装系统,包括:大车机构、小车机构、起升机构和翻板机构;大车机构包括大车主体和大车走行装置;大车主体包括位于施工轨道两侧的立柱和横跨施工轨道的横梁,立柱和横梁连接形成门字形结构;大车走行装置安装在立柱下方,被配置为驱使大车主体沿施工轨道方向移动;小车机构包括小车主体和小车走行装置;小车主体位于大车主体的横梁上方;小车走行装置安装在小车主体与横梁之间,被配置为驱使小车主体沿横梁长度方向移动;起升机构包括驱动卷筒、钢丝绳和吊具;驱动卷筒安装在小车主体上,驱动卷筒通过钢丝绳连接至吊具,驱动卷筒被配置为驱使吊具沿竖直方向移动;吊具包括吊梁、可沿吊梁两侧伸缩的伸缩臂、位于伸缩臂下方的挂板和设置在挂板内的检测开关,待吊装的渣土箱两侧设置有与挂板相匹配的吊耳;翻板机构包括安装在小车主体或吊梁上的翻板钩,翻板钩被配置为挂位渣土箱底部以便协同起升机构翻转渣土箱;大车走行装置、小车走行装置和驱动卷筒的控制系统均与可编程逻辑控制器(plc)通讯连接,大车走行装置、小车走行装置和驱动卷筒内还设置有绝对值编码器,绝对值编码器被配置为获取吊具的三维位置信息,plc被配置为根据三维位置信息自动控制大车走行装置、小车走行装置和驱动卷筒的移动;plc内还预置有防摇程序,防摇程序被配置为根据三维位置信息自动调节大车机构、小车机构和吊具的速度;起升机构还包括用于监测钢丝绳状态的金属探伤装置。
3、可选地,大车走行装置、小车走行装置和驱动卷筒内还设置有振动监测传感器。
4、可选地,该龙门吊自动吊装系统的主通讯网络采用modbus-tcp工业通讯网络。
5、可选地,该龙门吊自动吊装系统还包括设置在施工轨道四周的视频监控装置。
6、可选地,视频监控装置具有人脸识别功能和音响系统,视频监控装置被配置为当识别到非工作人员进入工作区域时通过音响系统发出警告将其驱逐。
7、可选地,绝对值编码器是多圈绝对值编码器。
8、可选地,吊具还设置有用于对渣土箱进行称重的电子秤。
9、可选地,该龙门吊自动吊装系统能够自动运行、半自动运行或手动运行。
10、可选地,金属探伤装置是磁性探伤装置;磁性探伤装置安置在驱动卷筒下方出绳处,包括磁记忆规划装置、弱磁检测装置、随动装置和导轨;磁记忆规划装置被配置为向钢丝绳施加外部磁场,弱磁检测装置被配置为检测钢丝绳附近的磁场,随动装置被配置为当钢丝绳因收放而摆动时驱使磁记忆规划装置和弱磁检测装置在导轨上跟随钢丝绳一起摆动。
11、本申请还提供了一种利用上述龙门吊自动吊装系统装卸渣土的方法,包括以下步骤:s1,渣土箱运输车移动至装载位置并与龙门吊自动吊装系统建立通讯;s2,大车主体和小车主体移动到装载位置;s3,吊具伸出伸缩臂并下放至预设高度;s4,吊具缩回伸缩臂至预设限位,使得挂板挂位在渣土箱的吊耳处;s5,吊具上升至卸载高度;s6,大车主体和小车主体移动到卸载位置;s7,翻板钩挂位渣土箱底部,同时吊具下降以便翻转渣土箱;以及s8,复位。
12、与现有技术相比,本申请所提供的龙门吊自动吊装系统和方法具有以下有益效果:
13、(1)本申请所提供的龙门吊自动吊装系统在大车走行装置、小车走行装置和起升机构驱动卷筒内安装有绝对值编码器,绝对值编码器能够对龙门吊本身、吊具和吊装中的渣土箱进行精确定位,plc即可根据定位信息自动装卸和运输渣土箱;整个渣土装卸和运输过程无需人工操作,在节省人力的同时避免了因人工操作失误而造成的安全事故;
14、(2)plc控制系统内还预置有防摇程序,防摇程序根据绝对值编码器所反馈的三维位置信息自动调节大车机构、小车机构和吊具的速度,使得在渣土箱装卸和运输的过程中不会产生较大的晃动导致渣土洒出,从而间接提升了渣土装卸效率;以及
15、(3)起升机构还包括用于监测钢丝绳状态的金属探伤装置,金属探伤装置优选为磁性探伤装置,磁性探伤装置能够根据对钢丝绳进行扫描时其产生的交变磁场检测肉眼不可见的钢丝绳破损程度,当钢丝绳出现问题时,及时将问题反馈到工作人员或调度室,避免因钢丝绳长期未受检测或难以肉眼检测而直接断裂造成吊装物坠落的事故发生。
技术特征:
1.一种龙门吊自动吊装系统,其特征在于,包括:
2.根据权利要求1所述的龙门吊自动吊装系统,其特征在于,所述大车走行装置、所述小车走行装置和所述驱动卷筒内还设置有振动监测传感器。
3.根据权利要求1所述的龙门吊自动吊装系统,其特征在于,所述龙门吊自动吊装系统的主通讯网络采用modbus-tcp工业通讯网络。
4.根据权利要求1所述的龙门吊自动吊装系统,其特征在于,还包括设置在所述施工轨道四周的视频监控装置。
5.根据权利要求4所述的龙门吊自动吊装系统,其特征在于,所述视频监控装置具有人脸识别功能和音响系统,所述视频监控装置被配置为当识别到非工作人员进入工作区域时通过所述音响系统发出警告将其驱逐。
6.根据权利要求1所述的龙门吊自动吊装系统,其特征在于,
7.根据权利要求1所述的龙门吊自动吊装系统,其特征在于,所述吊具(100)还设置有用于对所述渣土箱进行称重的电子秤。
8.根据权利要求1所述的龙门吊自动吊装系统,其特征在于,所述龙门吊自动吊装系统能够自动运行、半自动运行或手动运行。
9.根据权利要求1所述的龙门吊自动吊装系统,其特征在于,所述金属探伤装置是磁性探伤装置;
10.一种利用权利要求1-9中任一项所述的龙门吊自动吊装系统装卸渣土的方法,其特征在于,包括以下步骤:
技术总结
本申请提供了一种龙门吊自动吊装系统和方法,该龙门吊自动吊装系统包括:大车机构、小车机构、起升机构和翻板机构;大车机构沿施工轨道方向移动;小车机构沿横梁长度方向移动;起升机构驱使吊具沿竖直方向移动;翻板机构协同起升机构翻转渣土箱;大车机构、小车机构和起升机构的控制系统均与PLC通讯连接,大车机构、小车机构和起升机构内还设置有绝对值编码器,绝对值编码器被配置为获取吊具的三维位置信息,PLC被配置为根据三维位置信息自动控制大车机构、小车机构和吊具的移动;PLC内还预置有防摇程序,防摇程序被配置为根据三维位置信息自动调节大车机构、小车机构和吊具的速度;起升机构还包括用于监测钢丝绳状态的金属探伤装置。
技术研发人员:蒋华,廖正京,谢国良,熊必超,杨睿喆
受保护的技术使用者:中铁电气化局集团有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!