一种煤矿竖井井筒的巡检系统及方法与流程
本发明属于井筒内巡检,涉及一种煤矿竖井井筒的巡检系统及方法。
背景技术:
1、井筒是整个煤矿的重要组成部分,承担接送井下作业工作人员、掘进与采煤等设备材料的上下井、以及原煤的运输等任务。受水蚀、杂物坠落、潮湿及生产运行等影响,竖井的井壁、罐梁以及其他设施存在着安全隐患。因此,每天都要安排专门的时间(一般为2个小时)进行竖井检查。巡检工人站在罐笼上的检查栏内自上而下进行巡视,记录检查情况,或及时处理小的问题。
2、上述竖井巡检方式主要存在着以下几个问题:罐笼以0.3m/s的速度下行,耗时较长;巡视人员受人眼视力的限制,井筒的一些细微变形及破损不能被及时发现;在罐笼运行过程中有可能会出现异物掉落等问题,巡检人员在工作中存在一定安全隐患。
3、目前,国内、外竖井井筒的巡检,都采用人工方式进行。针对人工巡检方式存在的效率低下,容易出现漏检,并且巡检过程中存在安全隐患等现状,亟待提供一种煤矿竖井井筒的巡检系统及方法,用以实现对矿井井筒的安全自动监测工作。
技术实现思路
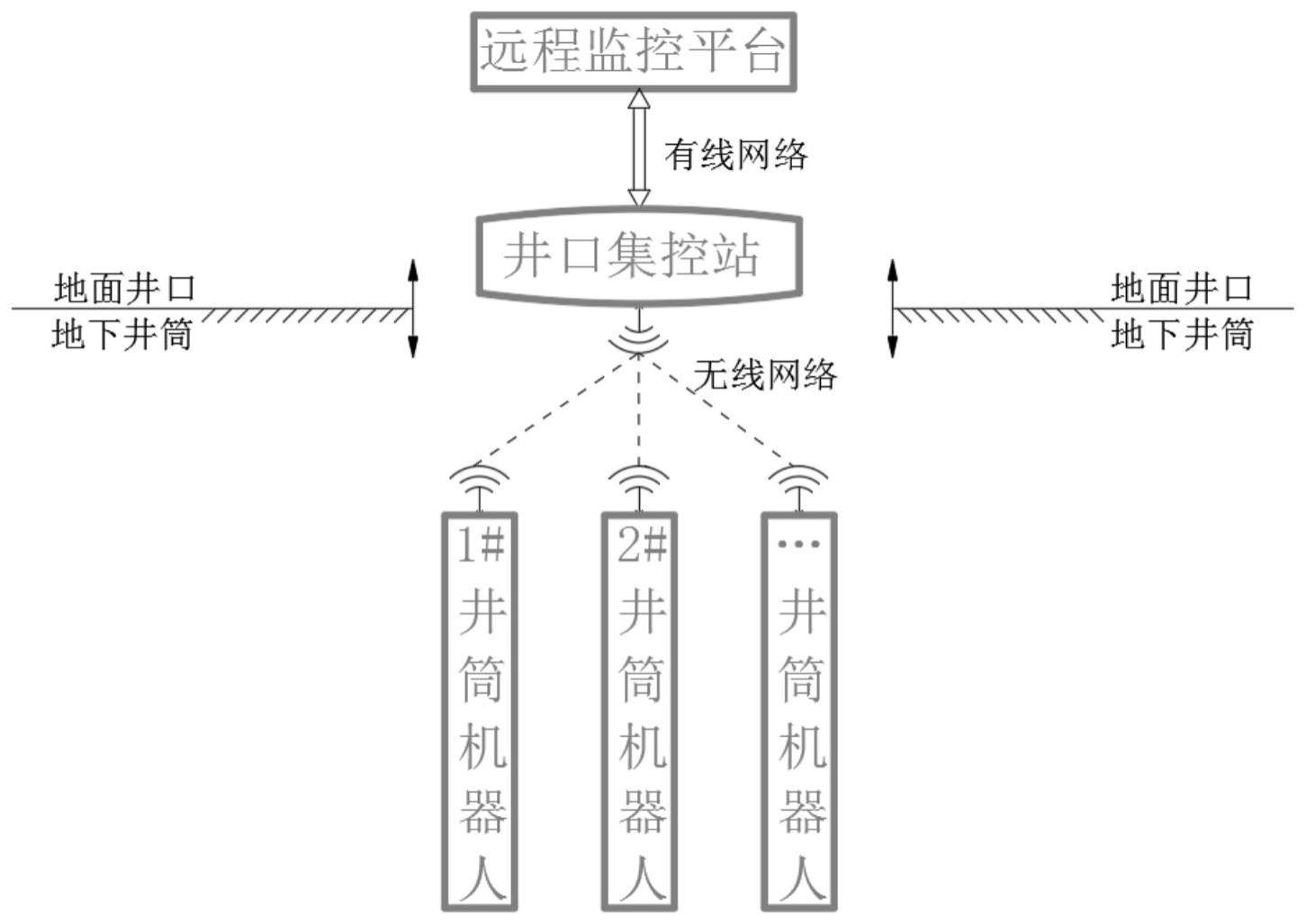
1、针对现有技术存在的不足,本发明的目的在于提供一种煤矿竖井井筒的巡检系统及方法,在本发明中,通过远程监控站、井口集控站和井筒机器人构成的巡检系统,实现了代替人员完成井筒内的巡检工作,保障了人员安全,提高了操作效率,能够实时对井筒内的情况进行检测,实现了对煤矿竖井井筒的实时检测。
2、为达此目的,本发明采用以下技术方案:
3、第一方面,本发明提供了一种煤矿竖井井筒的巡检系统,所述巡检系统包括地面装置和井筒机器人,所述井筒机器人设置于煤矿立井提升系统内,所述井筒机器人用于实时监测井筒状态;
4、所述地面装置包括远程监控站和井口集控站,所述远程监控站通过提升装置传动连接所述井筒机器人,用于远程监视和/或操作所述井筒机器人的提升和下放,且所述提升装置上设置有位置感应器,所述井口集控站设置于井口边缘,用于接收远程监控站的指令控制所述井筒机器人的动作和数据修改,并将结果反馈至所述远程监控站。
5、在本发明中,通过远程监控站、井口集控站和井筒机器人构成的巡检系统,实现了代替人员完成井筒内的巡检工作,保障了人员安全,提高了操作效率,能够实时对井筒内的情况进行检测,实现了对煤矿竖井井筒的实时检测。
6、作为本发明一种优选的技术方案,所述提升装置包括卷筒、天轮、传送带和提升绳,所述卷筒和天轮之间通过传动带连接,所述卷筒主动旋转,通过传送带带动天轮旋转。
7、优选地,所述提升绳缠绕于所述天轮上,所述提升绳的两端分别固定连接一个所述井筒机器人,随着天轮旋转,带动一个井筒机器人下放的同时另一个井筒机器人提升。
8、优选地,所述提升绳和所述井筒机器人连接的两端设置有位置感应器。
9、作为本发明一种优选的技术方案,所述远程监控站包括控制模块、信号接收模块和第一人机交互模块,所述信号接收模块和第一人机交互模块分别电性连接所述控制模块,所述信号接收模块与信号发射模块通过有线实现数据传输,所述信号接收模块用于接收信号发射模块传输的数据信息并发送至控制模块,所述控制模块将数据信息打包汇总后传输至第一人机交互模块。
10、优选地,所述控制模块包括上位机,所述上位机上设置有可触摸屏,所述上位机用于人工接触所述可触摸屏对井筒机器人进行远程控制、数据采集、保存和报警提醒。
11、优选地,所述远程监控站通过有线网络连接所述井口集控站,实现数据交换。
12、优选地,所述井筒机器人通过gps定位模块与所述远程监控站连接。
13、需要说明的是,本发明中的远程监控模块安装在绞车房的工控计算机上,井筒内机器人的所有工作状态信息,全部在人机交互平台界面上显示和保存,相关数据自带报警功能,有故障进自报警弹出,避免人员长期监视界面。且远程监控平台利用labview软件编制主界面,实现井筒机器人数据的连接、显示、数据的存储、历史数据查询。
14、需要说明的是,本发明中的上位机,采用labview图形化编程语言(g语言)进行开发协调设计,它可产生独立运行的可执行文件,它是一个真正的32位/64位编译器。它广泛地被工业界、学术界视为一个标准的数据采集和设备控制软件。其中,labview开发编程环境主要由编辑器、链接器、llvm、编译器和运行时等功能组件组成。进一步地,通过labview图形化编程语言开发的远程监控站的人机互图形界面程序,主要负责井筒机器人远程自动控制、各种阀值参数设置、机器人运行状态监控,以及实时数据采集、分析、判断、执行和储存等功能,主要实现在“无人执守”状态下,完成实现监控,参数修改、数据处理和数据保存,正常维检过程中不需要作业人员“坚守”,所有数据自动保存和存储。
15、作为本发明一种优选的技术方案,所述远程监控站还包括报警模块和急停模块,所述报警模块和急停模块分别独立电性连接所述控制模块,所述第一人机交互模块通过控制模块手动控制报警模块和/或急停模块。
16、优选地,所述控制模块根据采集的数据情况自动控制报警模块和/或急停模块。
17、作为本发明一种优选的技术方案,所述井口集控站包括数据处理模块和控制面板,所述数据处理模块电性连接所述控制面板,所述数据处理模块用于将数据信息反馈至控制面板进行数据显示,所述控制面板将显示的数据信息打包汇总后传输至第一人机交互模块。
18、作为本发明一种优选的技术方案,所述数据处理模块包括信号接收转存模块以及报警装置,所述信号接收转存模块和报警装置分别独立电性连接所述控制面板,所述信号接收转存模块通过无线实现数据传输和保存,所述控制面板经过人为手动控制报警装置。
19、优选地,所述控制面板根据采集的数据情况自动控制报警装置。
20、优选地,所述井筒机器人通过gps定位模块与所述井口集控站连接。
21、需要说明的是,本发明中的井口集控站安装在井口附近,其自带触摸屏,可以在井口设置和控制井筒内机器人的动作和数据修改。井口集控主站可以通过无线方式同时控制井口内的机器人,完成不同模式的巡检。且井口集控站中的各种主控板、数据板和通信板等采用pico开发设计,主站也安装有3.5寸触摸屏,用来完成机器人的各种参数设置和控制。
22、作为本发明一种优选的技术方案,所述井筒机器人包括机体和设置于机体上的机械手臂,所述机械手臂上设置有视觉图像采集系统和gps定位模块。
23、需要说明的是,本发明中的井筒机器人以快速便捷的安装方式,固定在移动速度在0.3m/s的罐笼顶或罐笼顶的栏杆平台里面的固定卡座内。且机械手臂张开后闭合抱住直径为45mm钢丝绳罐道,手臂内部安装有微型绳径检测位移传感器。罐耳滑套磨损位移检测传感器,安装在机器人油箱上端旋转平台内。井筒机器人核心控制权也采用pico开发板设计,井筒机器人的电池组的电量、电压、温度监测数据,都接入道pico的相应接口上,并利用pico主控板把监控数据通过无线信号zigbee传输到井口集控站位置。
24、优选地,所述机械手臂可360°旋转。
25、优选地,所述机械手臂可伸缩。
26、优选地,所述机械手臂由第一半圆结构和第二半圆结构围成圆形结构,所述圆形结构内部为空腔。
27、优选地,所述第一半圆结构的一端和所述第二半圆结构的一端转动连接。
28、优选地,所述机械手臂远离所述转动连接处的一端可旋转的设置在所述机体的顶部。
29、优选地,所述视觉图像采集系统包括下位机和防爆摄像头;所述防爆摄像头所采集到的图像信息经下位机处理后,再经有线图传模块传输至所述上位机。
30、作为本发明一种优选的技术方案,所述机体内设置有充电电池组,所述充电电池组均用于为所述井筒机器人提供动力以及实时检测所述井筒机器人的耗电状态。
31、作为本发明一种优选的技术方案,所述机体内还设置有照明装置,所述照明装置连接所述充电电池组。
32、需要说明的是,本发明中的井筒机器人采用4ah的24v锂聚合物电池,把电池组封装在一个特制不锈密闭的金属壳内,为防止电池仓内的外引正负电极短路,其正负电极采用隐藏式胶封电极口,一是保证防水、防尘和防潮,二是防止正负电极短路,只要不人为短接正负电极电池组不会发生短路现象。
33、需要说明的是,本发明中的井筒机器人受到罐笼顶端平台安装空间的限制,必须把所有功能包括电气和机械部件,全部集成到一个300×300×600mm不锈钢双层的机体内部,而且便于操作移动方便井筒机器人整机重量不超过30kg,可旋转支撑臂最长300mm。并且每台井筒机器人的数据处理和逻辑控制核心,也同样采用嵌入式raspberry pi pico高性能的rp2040微控制器,具有灵活数字接口。微控制器芯片搭载了arm cortex m0+双核处理器,高达133mhz的运行频率,内置了264kb的sram和2mb的内存,还板载有多达26个多功能的gpio引脚,支持低功耗睡眠和休眠模式,可通过usb识别为大容量存储器进行拖放式下载程序,精确的片上时钟和定时器。软件可选用c/c++sdk,或者使用micropython进行开发。
34、进一步地,嵌入式raspberry pi pico高性能的rp2040微控制器,它是井筒机器人的各种数据处理的中心枢纽,它担负责井筒机器人所有传感器数据收集、处理、远传和现场执行等功能,它的性能可靠是保证井筒机器人本身平稳运行的关键条件。
35、优选地,所述机体内还设置有深度测量装置。
36、优选地,所述深度测量装置中的传感器为接触式旋转编码器,所述深度测量装置包括摩擦轮,摩擦轮安装在机体的一侧底部,所述机体将摩擦轮顶压在井筒侧壁上,所述接触式旋转编码器安装在所述摩擦轮的轴上,由所述摩擦轮带动所述接触式旋转编码器旋转。
37、第二方面,本发明提供了一种第一方面所述的巡检系统的巡检方法,所述巡检方法包括:
38、(1)巡检前,在纵向上分段划分井筒,每一段内均配置一个井筒机器人,使得每个井筒机器人能够负责各自区域内的巡检任务;在放置井筒机器人时,对其位置信息进行定位;同时在巡检前也对提升装置定位;
39、(2)巡检时,井筒机器人按照规定的巡检区域对井筒进行监测,采用防爆摄像头对井筒的井壁图像进行监测,并将采集到的图像上传到上位机图像后处理系统中;通过gps定位模块采集井筒机器人的实时位置信息,并上传到井口集控站和远程监控站;实时检测提升装置的位置信息,并实时上传到井口集控站和远程监控站;
40、(3)巡检后,采用上位机图像后处理系统对采集到的图像进行处理,以判断井筒是否有缺陷存在。
41、需要说明的是,本发明中对井筒的自动巡检实现,由远程监控站、井口集控站和井筒机器人三个硬件做总体支撑,井口集控制站和井筒机器人的控制核心单元,全部搭载aspberry pi pico rp2040双核m0处理器,保证数据采集、处理和执行的精准、可靠。且井筒机器人在维检过程中的动作逻辑执行和数据检测处理全部采用软件程序处理,处理速度高效精准。在整体设计过程中,始终坚持“实际、实用、实效”原则,三大功能块在系统上连接为一体,但在功能执行上又可相互独立,即井口集控站和井筒机器人脱离上位机后仍可自动完成作业任务,不受上位机的“停滞”影响。其优点具体表现在于:能够实现井筒巡检自动化和信息化;能够较为全面检查井壁、罐道、罐梁以及其它竖井设施的状况;对罐道和罐梁变形的检测精度比较高;能够实现对矿井井筒的安全自动巡检工作,巡检人员只要负责维修和隐患清理等工作即可,可以缩短检查时间、减轻工作压力、以及提高作业效率;能够长期积累检测数据,有助于通过对相关数据进一步分析,可以获得相当长的时期内井筒变形的相关信息。
42、与现有技术相比,本发明的有益效果为:
43、在本发明中,通过远程监控站、井口集控站和井筒机器人构成的巡检系统,实现了代替人员完成井筒内的巡检工作,保障了人员安全,提高了操作效率,能够实时对井筒内的情况进行检测,实现了对煤矿竖井井筒的实时检测。
- 还没有人留言评论。精彩留言会获得点赞!