智能网联垃圾箱系统及垃圾投放监控方法与流程
本发明属于智能垃圾箱,具体涉及一种智能网联垃圾箱系统及垃圾投放监控方法。
背景技术:
1、随着科技的发展,智能垃圾箱也逐渐走入了万千小区,但是现有的智能垃圾箱具有以下问题:
2、第一,现有的智能垃圾箱系统没有网联功能,无法对垃圾箱数据进行精确的分析。
3、第二,现有的智能垃圾箱系统使用很简单的传感器和控制器来实现自动开关盖,但是检测精度受到很多因素影响,检测效果不稳定。
技术实现思路
1、为了解决上述技术问题,本发明提出了一种智能网联垃圾箱系统及垃圾投放监控方法。
2、为了达到上述目的,本发明的技术方案如下:
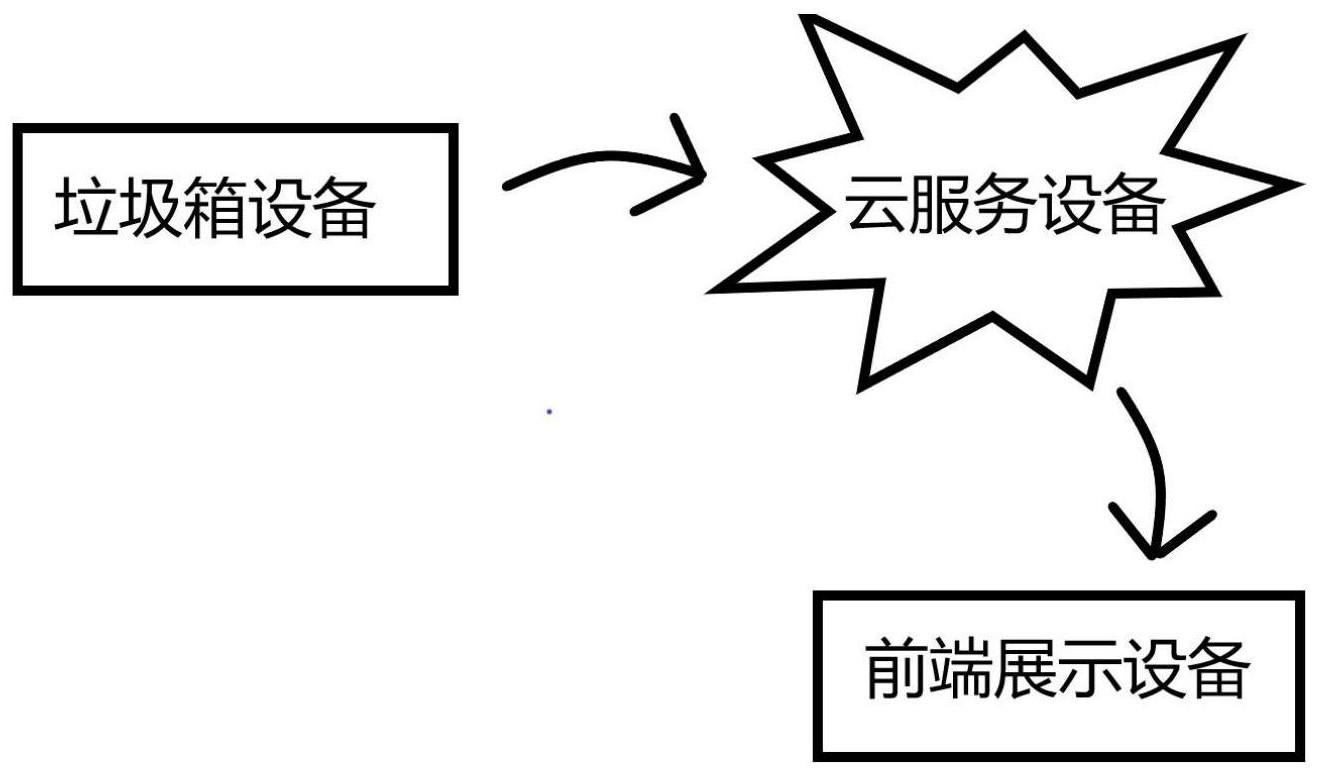
3、第一方面,本发明公开一种智能网联垃圾箱系统,包括:
4、垃圾箱设备,垃圾箱设备包括:控制器、用于对垃圾的满箱率进行检测的超声装置、用于对行人进行检测的单线雷达、用于对垃圾箱的位置进行定位的gps装置、用于对垃圾箱内情况进行影像采集的垃圾影像采集装置、用于对垃圾箱周围行人进行影像采集的行人影像采集装置、用于实现垃圾箱开关的箱盖驱动装置、用于实现数据存储的存储装置,超声装置、单线雷达、gps装置、垃圾影像采集装置、行人影像采集装置、箱盖驱动装置、存储装置分别与控制器通信连接,垃圾箱设备用于采集数据、分析数据并将其上传至云服务设备;
5、云服务设备,云服务设备与垃圾箱设备网络连接,用于对上传的垃圾箱的满箱率、gps信息、垃圾箱内图像、行人图像进行分析;
6、前端展示设备,前端展示设备与云服务设备网络连接,用于实现数据展示。
7、第二方面,本发明公开一种智能网垃圾箱系统,该垃圾箱系统具有联网功能,利用云服务设备实现数据积累,收集垃圾箱数据一方面可以监控垃圾箱工作状态,另一方面提供数据给算法以帮助算法更好的进行训练,提升识别精度。
8、综上述,本发明公开一种高效、低成本、通用的智能网垃圾箱系统。
9、在上述技术方案的基础上,还可做如下改进:
10、作为优选的方案,云服务设备包括:主服务器以及分别与主服务器通讯连接的服务器和云服务器;
11、服务器用于实现垃圾识别,云服务器用于实现人脸检测。
12、采用上述优选的方案,服务器和云服务器各司其职,降低对服务器的处理压力。
13、作为优选的方案,服务器采用yolov5模型进行垃圾识别;
14、yolov5模型将时间轴上的前后两张图片进行对比和识别,去除重复部分,获取当前新垃圾的种类和位置。
15、采用上述优选的方案,有效减少了网络资源和服务端算力资源的浪费,处理速度快。
16、作为优选的方案,垃圾箱设备还包括:用于对垃圾箱进行照明的照明灯,和/或,用于对控制器进行降温的风扇;
17、照明灯和/或风扇分别与控制器通信连接。
18、采用上述优选的方案,照明灯可以根据控制器设定时间阈值对垃圾箱周围环境进行补光。风扇可以对控制器进行散热降温,延长控制器的使用寿命,避免控制器出现故障。
19、此外,另一方面,本发明还公开一种垃圾投放监控方法,利用上述任一种智能网联垃圾箱系统进行垃圾投放监控,具体包括以下步骤:
20、超声装置对垃圾的满箱率进行检测,单线雷达对行人进行检测,gps装置对垃圾箱的位置进行定位、垃圾影像采集装置对垃圾箱内情况进行影像采集,行人影像采集装置对垃圾箱周围行人进行影像采集;
21、控制器对上述数据进行分析,并将垃圾箱的满箱率、gps信息、垃圾箱内图像、行人图像发送至云服务设备;
22、云服务设备对上传的数据进行分析;
23、前端展示设备实现数据展示。
24、本发明公开一种智能网垃圾箱方法,利用云服务设备实现数据积累,收集垃圾箱数据一方面可以监控垃圾箱工作状态,另一方面提供数据给算法以帮助算法更好的进行训练,提升识别精度。
25、作为优选的方案,控制器通过以下步骤控制箱盖驱动装置动作,实现垃圾箱的开关:
26、控制器循环获取单线雷达的udp报文;
27、将udp报文解析成点云数据;
28、对每一圈点云数据进行筛选聚类;
29、聚类后计算出每一类的重心;
30、利用卡尔曼滤波进行多目标跟踪,对每个目标状态进行分析,判断其是否符合开盖条件,
31、若符合,则箱盖驱动装置动作,垃圾箱打开;
32、否则,不动作。
33、采用上述优选的方案,具有良好的跟踪效果,且对控制器的处理要求较低。
34、作为优选的方案,用卡尔曼滤波进行多目标跟踪,对每个目标状态进行分析,判断其是否符合开盖条件,
35、若符合,则箱盖驱动装置动作,垃圾箱打开;
36、否则,不动作;
37、具体包括以下内容:
38、用卡尔曼滤波进行多目标跟踪,对每一个跟踪目标进行状态分析;
39、判断该目标处于静止状态还是运动状态,
40、若处于静止状态,则进一步判断其与垃圾箱之间的距离是否符合小于距离阈值d1,
41、若小于,则箱盖驱动装置动作,垃圾箱打开;
42、否则,不动作;
43、若处于运动状态,则进一步判断运动速度、运动方向以及与垃圾箱之间的距离,
44、若运动速度大于速度阈值、运动方向朝向垃圾箱方向、且与垃圾箱之间的距离小于距离阈值d2,d2>d1,则箱盖驱动装置动作,垃圾箱打开;
45、否则,不动作。
46、采用上述优选的方案,通过调整运动目标的检测距离,可以调整垃圾箱开盖反应速度。
47、作为优选的方案,在每次垃圾影像采集装置采集垃圾箱内图像后,控制器均需要进行图像去重处理,去除重复的垃圾箱内图像,具体包括以下步骤:
48、获取垃圾影像采集装置采集的垃圾箱内新图像;
49、获取超声装置采集的垃圾箱的新满箱率;
50、从存储装置获取垃圾箱内上一次图像和垃圾箱的上一次满箱率;
51、比较垃圾箱内图像的变化和/或满箱率的变化,判断垃圾箱内是否有新垃圾投入,去除重复图像。
52、采用上述优选的方案,避免因为控制器的误判造成箱盖的开关,导致处理这次上传数据对计算资源的浪费。进一步,对于包含两个或者多个垃圾桶的垃圾箱,每次开关盖并不一定所有垃圾桶都有投放垃圾,图片去重可以去掉没有投放垃圾的数据。
53、作为优选的方案,比较垃圾箱内图像的变化和/或满箱率的变化,判断垃圾箱内是否有新垃圾投入,去除重复图像;具体包括以下内容:
54、对比超声装置采集的满箱率变化是否大于阈值,
55、若大于,则垃圾箱有新垃圾投入;
56、否则,垃圾箱没有新垃圾投入,图像去重。
57、采用上述优选的方案,方法简单,对控制器的处理要求较低。
58、作为优选的方案,“比较垃圾箱内图像的变化和/或满箱率的变化,判断垃圾箱内是否有新垃圾投入,去除重复图像”中采用差异哈希算法进行图像对比,具体包括以下步骤:
59、对两张垃圾箱内图像进行预处理;
60、根据设置的图像块大小对两张垃圾箱内图像分别进行分割;
61、对于每张垃圾箱内图像,将所有图像块进行排序,靠近中心位置的图像块排在队列前面,形成两个图像块队列;
62、每次从两个图像块队列中分别提取一个图像块,计算对应的dhash值;
63、利用hamming距离对比两个图像块dhash值之间的差异,判断hamming距离是否大于阈值,
64、若大于,则两张垃圾箱内图像差异大,停止比较,垃圾箱有新垃圾投入;
65、否则,继续对比队列中的图像块的dhash值,直到队列为空,若所有图像块对比差异小,则垃圾箱没有新垃圾投入,图像去重。
66、与现有技术相比,本发明具有如下的有益效果:
67、1、现有智能垃圾箱在设计上通常使用很简单的传感器和控制器来实现自动开关盖,但是检测精度受到很多因素影响,检测效果不稳定,本技术采用超声装置、单线雷达、gps装置、垃圾影像采集装置、行人影像采集装置、箱盖驱动装置、存储装置,可以大大提高检测精度,降低误检测的概率,提升用户体验;
68、2、利用图像去重算法,有效减少了网络资源和服务端算力资源的浪费,图像去重算法虽然实现上比较简单,但是有效利用了现有的系统特点,可以在处理速度和精度上实现很好的平衡;
69、3、本发明所公开的智能垃圾箱系统具有网联功能,数据积累对于当前技术发展有着不可替代的作用,收集垃圾箱数据一方面可以监控垃圾箱工作状态,另一方面提供数据给算法以帮助算法更好的进行训练,提升识别精度。
- 还没有人留言评论。精彩留言会获得点赞!