一种分体式仓式机器人以及系统的制作方法
本发明涉及机器人,更具体地说,是涉及一种分体式仓式机器人以及系统。
背景技术:
1、随着楼宇服务智能化的兴起,人们对于机器人的智能服务接受度较高。对于酒店、写字楼内的客户,在日常生活中,有购物、快递、收发文件、取送酒店物品等需求。而这些工作通常是楼宇大堂的服务员完成。随着人力成本越来越高,酒店物业服务就有降低成本,提高服务水平的需求。但随着智能机器人的普及,而机器人可以充当物业服务人员的角色,减少服务的用工成本。
2、但目前的独立的服务机器人均是一体的机器人,以快递机器人为例,机器人采用固定式的货仓可以用于快递员投放进快递,然后机器人再送入到楼宇中的客户那里。当机器人在送物品过程中,又有快递员送过来时,就需要快递员进行等待,导致时间浪费,这样就导致一体式的送货机器人在使用时不够灵活,送货机器人使用不便的问题。
3、因此,现有技术还有待于改进和发展。
技术实现思路
1、本发明的目的在于提供一种分体式仓式机器人以及系统,以解决现有技术中独立一体式的送货机器人在使用时不够灵活,送货机器人使用不便的问题。
2、为实现上述目的,本发明采用的技术方案是:
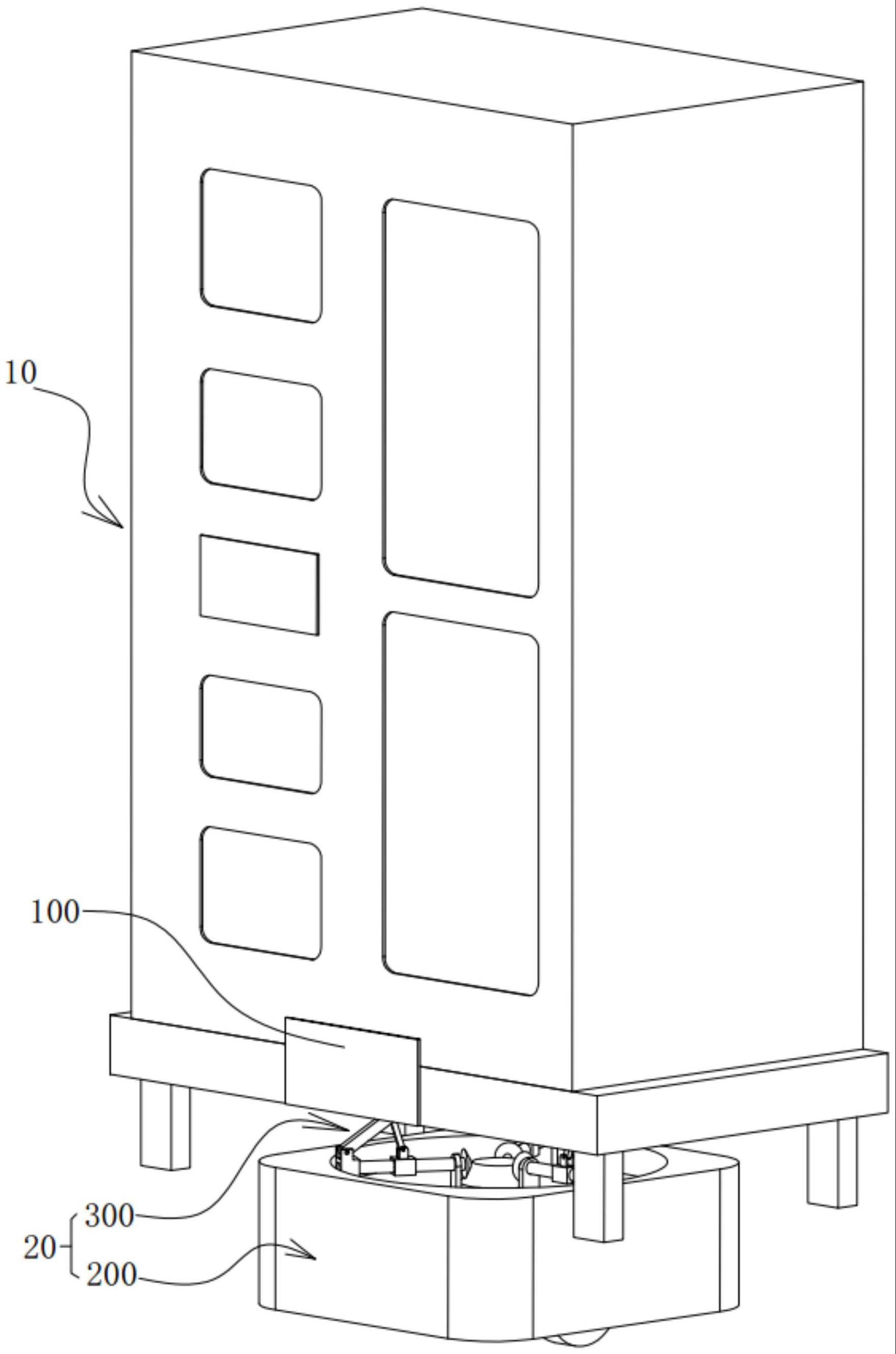
3、一方面,本发明提供一种分体式仓式机器人,包括:多个货柜装置,以及至少一个移动机器人;
4、货柜装置包括标识件,货柜装置用于存放客户所需要的物品;
5、移动机器人包括:装置本体,用于移动;
6、识别组件,识别组件设置在装置本体上,并用于识别标识件;以及
7、对接组件;对接组件设置在装置本体上,并可分离或连接于其中一个货柜装置。
8、在一个实施例中,对接组件包括:动力源,动力源固定连接在装置本体上;
9、至少三个升降组件,三个升降组件均连接动力源;
10、三个升降组件环绕动力源均匀分布,并通过动力源的驱动而进行同步升降。
11、在一个实施例中,升降组件包括:直线驱动部,直线驱动部连接动力源;
12、支撑杆,支撑杆的一端铰接在装置本体上;
13、推动连杆,推动连杆的一端铰接在直线驱动部上,另一端铰接在支撑杆上;
14、推动连杆通过直线驱动部的驱动而沿径向移动,以推起或下放推动连杆。
15、在一个实施例中,支撑杆背离装置本体的一端设置有支撑台,支撑台具有第一表面,第一表面沿径向延伸预设距离,第一表面用于抵靠并支撑货柜装置上的对接槽的底面。
16、在一个实施例中,支撑台还具有支撑侧面,支撑侧面沿上下方向延伸预设距离,支撑侧面用于抵靠货柜装置上的对接槽的侧壁。
17、在一个实施例中,装置本体上设置有轴承座;
18、动力源包括:主动电机,主动电机固定设置在装置本体上;
19、主动锥齿轮,主动锥齿轮的中轴线沿上下方向设置,并连接在主动电机上,通过主动电机的带动而转动;
20、直线驱动部包括:传动螺杆,传动螺杆沿径向延伸,并转动连接在轴承座上;
21、从动锥齿轮,从动锥齿轮连接在传动螺杆上,且与主动锥齿轮相啮合;
22、推动螺母,推动螺母螺接在传动螺杆上;
23、推动连杆铰接在推动螺母上。
24、在一个实施例中,装置本体的上表面上开设有沉槽;
25、直线驱动部和动力源设置在沉槽内。
26、在一个实施例中,支撑杆上开设有避空槽,推动连杆连接在避空槽内。
27、在一个实施例中,识别组件包括:视觉传感器,视觉传感器设置在装置本体上,视觉传感器用于采集标识件的识别信息以确定待对接的货柜装置;以及
28、激光雷达,激光雷达采集货柜装置的位置信息,并用于控制对接组件对接于货柜装置的对接槽。
29、另一方面,本发明还提供一种分体式仓式机器人系统,包括后台控制主机,以及如上所述的分体式仓式机器人;
30、后台控制主机用于接收到货柜装置的收货指令,并发送启动指令到移动机器人;
31、移动机器人通过识别组件识别到相应的货柜装置,并通过对接组件与货柜装置进行对接;
32、货柜装置用于通过移动机器人的驱动而移动到相应的客户位置。
33、本发明提供的一种分体式仓式机器人以及系统的有益效果至少在于:通过设置货柜装置实现放置货物的功能,通过设置移动机器人可以通过对接组件与货柜装置进行对接或脱离,当与货柜装置对接好后,通过移动机器人移动到楼宇相应的房间,将货柜中的货物送到对应的客户位置,客户打开货柜取出相应的物品,从而实现送货功能。在移动机器人进行送货的期间,其他在货柜装置放置在预设位置,可以让送货员将物品先放置在货柜中,进行等待送货,当移动机器人送完一个货柜装置中的物品后,再移动到对应位置而与货柜装置进行脱离,与下一货柜装置进行连接,从而驱动下一货柜装置进行移动送货。这样采用分体式的设置,实现了货柜机器人的灵活使用,且方便了货柜装置的更换。
技术特征:
1.一种分体式仓式机器人,其特征在于,包括:多个货柜装置,以及至少一个移动机器人;
2.如权利要求1所述的分体式仓式机器人,其特征在于,所述对接组件包括:动力源,所述动力源固定连接在所述装置本体上;
3.如权利要求2所述的分体式仓式机器人,其特征在于,所述升降组件包括:直线驱动部,所述直线驱动部连接所述动力源;
4.如权利要求3所述的分体式仓式机器人,其特征在于,所述支撑杆背离所述装置本体的一端设置有支撑台,所述支撑台具有第一表面,所述第一表面沿径向延伸预设距离,所述第一表面用于抵靠并支撑所述货柜装置上的对接槽的底面。
5.如权利要求4所述的分体式仓式机器人,其特征在于,所述支撑台还具有支撑侧面,所述支撑侧面沿上下方向延伸预设距离,所述支撑侧面用于抵靠所述货柜装置上的对接槽的侧壁。
6.如权利要求3所述的分体式仓式机器人,其特征在于,所述装置本体上设置有轴承座;
7.如权利要求3所述的分体式仓式机器人,其特征在于,所述装置本体的上表面上开设有沉槽;
8.如权利要求3所述的分体式仓式机器人,其特征在于,所述支撑杆上开设有避空槽,所述推动连杆连接在所述避空槽内。
9.如权利要求1所述的分体式仓式机器人,其特征在于,所述识别组件包括:视觉传感器,所述视觉传感器设置在所述装置本体上,所述视觉传感器用于采集所述标识件的识别信息以确定待对接的所述货柜装置;以及
10.一种分体式仓式机器人系统,其特征在于,包括后台控制主机,以及如权利要求1-9任一所述的分体式仓式机器人;
技术总结
本发明涉及机器人技术领域,提供一种分体式仓式机器人以及系统,包括:多个货柜装置,以及至少一个移动机器人;货柜装置包括标识件,货柜装置用于存放客户所需要的物品;移动机器人包括:装置本体,用于移动;识别组件,识别组件设置在装置本体上,并用于识别标识件;以及对接组件;对接组件设置在装置本体上,并可分离或连接于其中一个货柜装置。以解决现有技术中独立一体式的送货机器人在使用时不够灵活,送货机器人使用不便的问题。
技术研发人员:李全印,支涛
受保护的技术使用者:北京云迹科技股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!