一种料场堆取料机自动取料方法、系统和装置与流程
本发明属于工业自动化取料,具体涉及一种料场堆料机自动取料方法及系统。
背景技术:
1、堆取料机作为原料场内主作业设备,主要完成堆料以及取料作业。堆取料机上设有驾驶室,操作人员在驾驶室内操作堆取料机完成堆取料作业。但现场环境恶劣,不利于工作人员身心健康。随着环保理念的推行以及操作人员工作环境改善的诉求,基于激光扫描的堆取料机自动驾驶技术得到广泛研究,就自动取料来说,仍存在以下问题:
2、在实际生产中,存在汽车卸料、钩机造堆情况,导致料堆堆放杂乱无章,现场工况复杂。此种工况下,多以半自动取料为主。其一,因料堆界限不明显,无法准确分割出待作业料堆模型,因此无法实现自动作业;其二,因料堆形状不规整,杂乱无章,导致料堆左右边界参差不齐,未能做到实时检测料堆边界,减少空行程,提高作业效率;其三,料堆不规整,同样工艺参数,取料量不稳定,取料效率低下。
3、另外,由于在取料过程中极易出现料堆塌料现象,当出现料堆塌料现象时,容易造成斗轮吃料过大,出现斗轮闷斗憋停的情况,这时通常只能暂停取料对塌料进行清理,目前并没有较好的应对策略。
技术实现思路
1、针对现有技术中的缺陷或不足,本发明提供了一种料场堆取料机自动取料方法及系统,对于料堆杂乱无章、不规整的情况,能够实现自动取料,且在取料过程中实时探测,提高取料作业效率。
2、为了实现上述目的,本发明采用如下技术方案:
3、第一方面,本发明的实施例提供了一种料场堆取料机自动取料方法,包括:
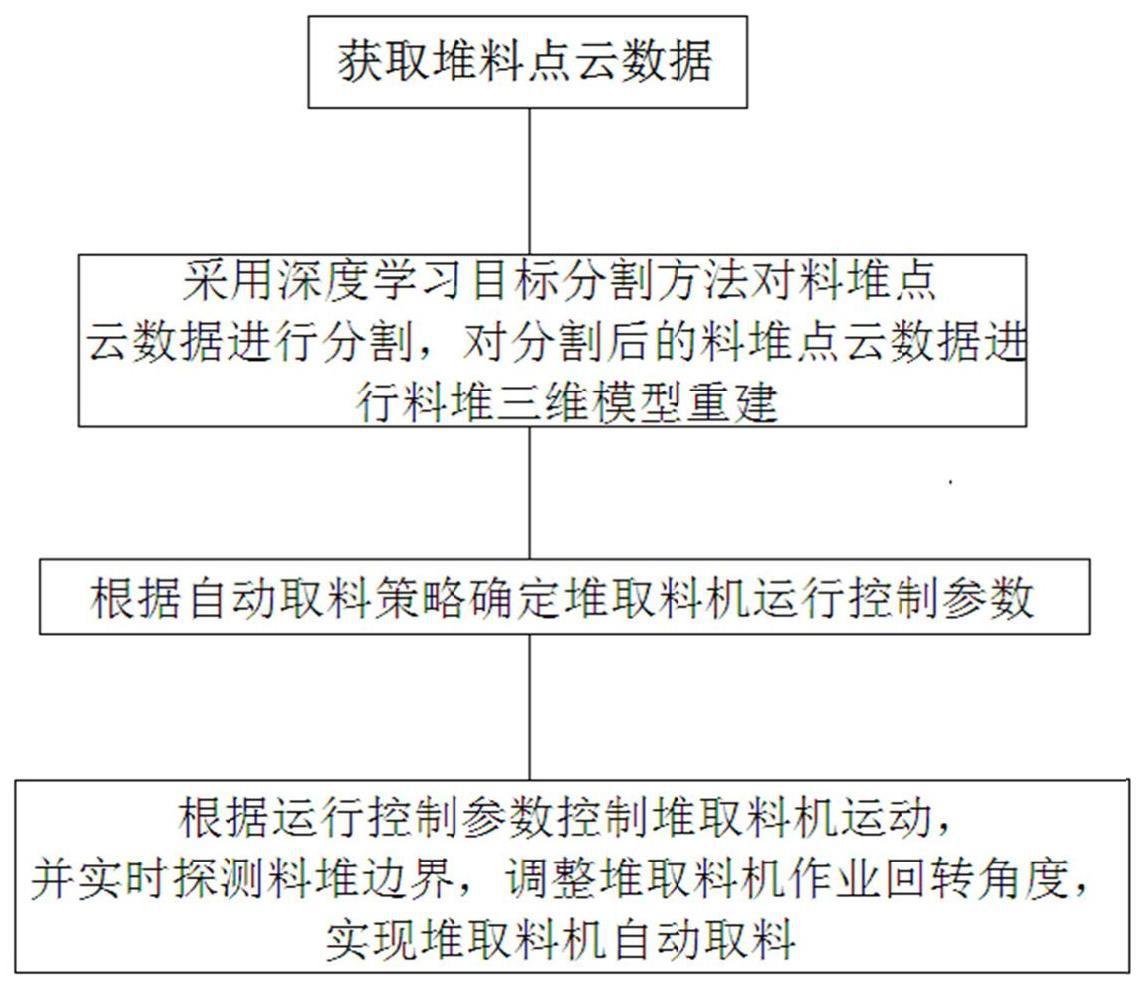
4、步骤1:获取料堆点云数据;
5、步骤2:采用深度学习目标分割方法对料堆点云数据进行分割,对分割后的料堆点云数据进行料堆三维模型重建;
6、步骤3:根据自动取料策略确定堆取料机运行控制参数;
7、步骤:4:根据运行控制参数控制堆取料机运动,并实时探测料堆边界,调整堆取料机作业回转角度,实现堆取料机自动取料。
8、第二方面,本发明的实施例提供了一种料场堆取料机自动取料系统,包括:
9、图像采集模块,设于堆取料机大臂末端斗轮两侧,用于获取料堆点云数据;
10、分割重建模块,采用深度学习目标分割方法对料堆点云数据进行分割,对分割后的料堆点云数据进行料堆三维模型重建;
11、运行控制参数获取模块,用于根据自动取料策略确定堆取料机运行控制参数;
12、控制器模块,根据运行控制参数控制堆取料机运动,并实时探测料堆边界,调整堆取料机作业回转角度,实现堆取料机自动取料。
13、第三方面,本发明的实施例提供了一种料场堆取料机自动取料装置,包括激光扫描仪、边缘计算机、服务器和操作端,所述激光扫描仪、边缘计算机、服务器和操作端依次连接。
14、所述激光扫描仪设置在堆取料机大臂末端斗轮两侧,用于料堆实时探测;
15、所述边缘计算机设置在堆取料机电气控制室内,进行激光扫描仪点云数据的实时处理与堆取料机状态实时采集、运动控制;
16、所述服务器设置在机房内部,经边缘计算机处理后的数据上传至此,同时作为多台堆取料机调度的中心;
17、所述操作端设置在集中中心,用于人机交互实现作业指令的下发、作业过程的监视、作业数据的查看。
18、与现有技术相比,本发明的有益效果在于:
19、1、本发明通过对料堆点云数据进行精准分割,解决了由于料堆堆放杂乱无章,料堆间有粘连的问题,避免因料堆界限不明显,无法准确分割处待作业料堆模型情况,从而为自动取料作业提供基础数据支撑。
20、2、本发明通过在取料过程中利用旋转前向激光扫描仪实时探测边界,实时调整作业回转角度,解决了因料堆不规整,导致空行程较多的问题,提高了取料作业效率。
技术特征:
1.一种料场堆取料机自动取料方法,其特征在于,包括以下步骤:
2.如权利要求1所述的一种料场堆取料机自动取料方法,其特征在于,采用深度学习目标分割方法对料堆点云数据进行分割,具体为:
3.如权利要求1所述的一种料场堆取料机自动取料方法,其特征在于,所述堆取料机运行控制参数包括顶层取料走行位置和回转角度、取料层回转边界角、初始走行位置以及大臂俯仰角度。
4.如权利要求1所述的一种料场堆取料机自动取料方法,其特征在于,所述根据自动取料策略确定堆取料机运行控制参数,具体为:
5.如权利要求4所述的一种料场堆取料机自动取料方法,其特征在于,所述对料堆三维模型进行分层,具体为:
6.如权利要求1所述的一种料场堆取料机自动取料方法,其特征在于,所述实时探测料堆边界,调整堆取料机作业回转角度,具体为:
7.一种料场堆取料机自动取料系统,其特征在于,包括:
8.一种料场堆取料机自动取料装置,其特征在于,包括激光扫描仪和边缘计算机,所述激光扫描仪与边缘计算机电连接;
9.如权利要求8所述的一种料场堆取料机自动取料装置,其特征在于,还包括服务器和操作端,所述服务器分别与边缘计算机和操作端电连接。
10.如权利要求9所述的一种料场堆取料机自动取料装置,其特征在于,所述服务器设置在机房内部,经边缘计算机处理后的数据上传至此,同时作为多台堆取料机调度的中心;
技术总结
本发明提供了一种料场堆取料机自动取料方法、系统和装置,属于工业自动化取料技术领域,包括以下步骤:获取料堆点云数据;采用深度学习目标分割方法对料堆点云数据进行分割,对分割后的料堆点云数据进行料堆三维模型重建;根据自动取料策略确定堆取料机运行控制参数;根据运行控制参数控制堆取料机运动,并实时探测料堆边界,调整堆取料机作业回转角度,实现堆取料机自动取料。本发明对于料堆杂乱无章、不规整的情况,能够实现自动取料,且在取料过程中实时探测,提高取料作业效率。
技术研发人员:孟凡光,张涌泉,毕学华
受保护的技术使用者:中冶东方工程技术有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!