一种基于板材货物搬运用万能抓手的制作方法
本发明涉及自动化搬运的,尤其涉及一种基于板材货物搬运用万能抓手。
背景技术:
1、吸盘抓手一般距离地面一定距离,吸盘抓手主要用于物料的抓取(放置),并使物料悬空,再通过水平输送滑轨将抓取的物料输送摆放至指定的区域。
2、现有吸盘抓手对板材吸附抓取时,功能单一,不能针对不同规格板材进行适应性调节,导致板材输送过程中的稳定性差;同时在面对尺寸长和厚度薄的板材搬运时,由于吸盘抓手的抓取面积较小并位于板材的中部,会导致板材在输送过程中,板材的两侧在空中呈下垂状态,致使板材发生形变,两侧垂落的板材在输送过程中会刮蹭到地面上设备(障碍物)而导致板材刮伤,且板材长时间处于形变状态,也会影响到板材的平整度。
技术实现思路
1、本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本申请的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、本发明提供一种基于板材货物搬运用万能抓手,能够解决吸盘抓手功能单一的问题,具体方案如下:
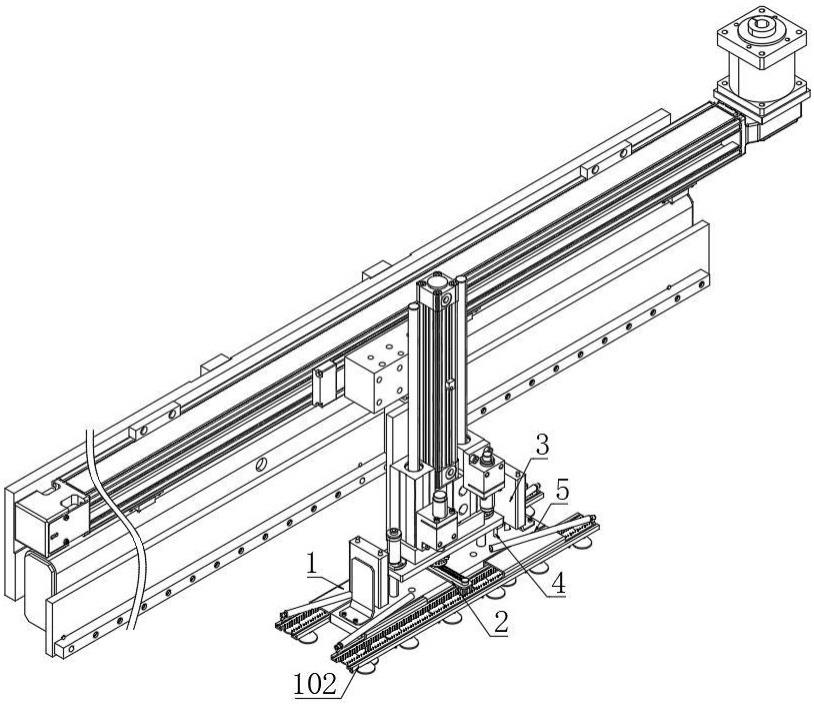
3、一种基于板材货物搬运用万能抓手,包括水平输送滑轨、竖直驱动气缸和真空泵,还包括与所述竖直驱动气缸的伸缩轴连接的横向板;所述横向板的前后端均通过支撑勾板安装有两块可横向滑动的齿板,两块所述齿板的齿牙相对并处于同一水平面上,且两块所述齿板呈平行布置;所述齿板的底端等距均设有多组第一吸盘,多组所述第一吸盘通过软管与真空泵的负压接头连通,第一吸盘用于吸附板材的顶端表面;其中,两块所述齿板相离横移展开后,其用于提升第一吸盘与板材之间的抓取面积。
4、作为本发明所述基于板材货物搬运用万能抓手的一种优选方案,其中:所述横向板的顶端中部安装有与其垂直布置的纵向板,且纵向板的前后端延伸至横向板的外侧;纵向板的两个端部皆安装有可转动的齿轮;齿轮位于两块所述齿板之间并与所述齿板啮合,齿轮的转动用于驱动两块齿板在支撑勾板上横向移动。
5、作为本发明所述基于板材货物搬运用万能抓手的一种优选方案,其中:所述横向板的两侧顶端中部安装有开口朝下的筒体,筒体的内部安装有活塞,筒体的内部设有第一弹簧,所述第一弹簧的一端与筒体尾部内壁固定连接,且第一弹簧的另一端与活塞的顶端固定连接,所述活塞的底端安装有连杆,所述横向板的顶端沿其厚度贯穿设有通孔,连杆的一端经通孔后安装有第二吸盘。
6、作为本发明所述基于板材货物搬运用万能抓手的一种优选方案,其中:所述齿板的底端安装有多组吹风管且其数量与第一吸盘对应;吹风管的吹风口朝向第一吸盘的下方;多组所述吹风管与筒体的尾部之间通过软管连通。
7、作为本发明所述基于板材货物搬运用万能抓手的一种优选方案,其中:所述横向板顶端安装有位于筒体一侧的三通管;三通管的顶端开口通过软管与所述真空泵负压接头连通;三通管的底端开口通过软管与第二吸盘连通;三通管的一侧开口朝向连杆,且三通管的一侧内部横向安装有胶塞杆,胶塞杆的杆部末端安装有位于连杆外侧的u型卡板。
8、作为本发明所述基于板材货物搬运用万能抓手的一种优选方案,其中:所述胶塞杆的杆部套接有的第二弹簧,且第二弹簧位于所述三通管一侧端面与u型卡板之间。
9、作为本发明所述基于板材货物搬运用万能抓手的一种优选方案,其中:远离所述三通管的连杆外壁贴有胶皮,且胶皮沿连杆的杆长方向布置。
10、作为本发明所述基于板材货物搬运用万能抓手的一种优选方案,其中:所述横向板的顶端转动安装有抽杆,且抽杆的外壁贴合横向板的顶壁;抽杆的一端始终与齿板的一侧末端连接。
11、作为本发明所述基于板材货物搬运用万能抓手的一种优选方案,其中:所述纵向板的顶端安装有与齿轮同心同轴的从动轮;从动轮之间通过内齿皮带连接;横向板的上方设有用于驱动内齿皮带传动的电机。
12、作为本发明所述基于板材货物搬运用万能抓手的一种优选方案,其中:所述齿板的顶部沿其板长方向开设有凹槽,且凹槽与支撑勾板滑动连接。
13、与现有技术相比,本发明至少可实现如下有益效果之一:
14、1、该装置通过齿板,齿板可横移调节至横向板的外侧,并通过其底端连接的第一吸盘使用,适用于不同尺寸、不同重量的板材搬运使用,同时还可对两块板材同时搬运,实用性强。
15、2、该装置通过齿轮,齿轮不仅能用于驱动与其啮合的两个齿板相离/相向横移展开,且在面对板材晃动或输送过程中立刻停止时,会产生的惯性,通过齿轮还可对两块齿板进行限位,并形成锁紧的效果,避免齿板在支撑勾板内滑行而导致板材下移摆放的位置形成偏差。
16、3、该装置通过第二吸盘,可对板材的中部进行吸附,提升板材搬运的稳定性,同时在吸附搬运板材前其可配合第一弹簧的弹力对板材顶端表面预定位。
17、4、该装置通过u型卡板,在第一吸盘和第二吸盘负压吸附在板材顶端表面并形成悬空输送过程中,u型卡板会限位贴合在连杆的外壁,防止第一吸盘下移推落被吸附的板材;在板材被输送至摆放区域时,u型卡板会与连杆脱离接触,连杆则会在第一弹簧弹力作用下带动第二吸盘下移,从而实现自动卸料的效果。
18、5、该装置通过抽杆,抽杆的一端贴合横向板的顶端,另一端与齿板的末端连接,从而形成对齿板的支撑效果,同时还可减少齿板与支撑勾板之间的磨损,使齿板底端的第一吸盘处于同一水平面上,并始终能让多组第一吸盘在吸附过程中与板材的顶端表面贴合,在面对较大重量板材搬运时,提升第一吸盘的抓取稳定性。
19、本发明的其他特征和优点将在随后的说明书中阐述,并且,部分的从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书以及附图中所特别指出的结构来实现和获得。
技术特征:
1.一种基于板材货物搬运用万能抓手,包括水平输送滑轨、竖直驱动气缸和真空泵,其特征在于:
2.如权利要求1所述的基于板材货物搬运用万能抓手,其特征在于:所述横向板的顶端中部安装有与其垂直布置的纵向板,且纵向板的前后端延伸至横向板的外侧;
3.如权利要求2所述的基于板材货物搬运用万能抓手,其特征在于:所述横向板的两侧顶端中部安装有开口朝下的筒体,筒体的内部安装有活塞,筒体的内部设有第一弹簧,所述第一弹簧的一端与筒体尾部内壁固定连接,且第一弹簧的另一端与活塞的顶端固定连接,所述活塞的底端安装有连杆,所述横向板的顶端沿其厚度贯穿设有通孔,连杆的一端经通孔后安装有第二吸盘。
4.如权利要求3所述的基于板材货物搬运用万能抓手,其特征在于:所述齿板的底端安装有多组吹风管且其数量与第一吸盘对应;
5.如权利要求4所述的基于板材货物搬运用万能抓手,其特征在于:所述横向板顶端安装有位于筒体一侧的三通管;
6.如权利要求5所述的基于板材货物搬运用万能抓手,其特征在于:所述胶塞杆的杆部套接有的第二弹簧,且第二弹簧位于所述三通管一侧端面与u型卡板之间。
7.如权利要求5所述的基于板材货物搬运用万能抓手,其特征在于:远离所述三通管的连杆外壁贴有胶皮,且胶皮沿连杆的杆长方向布置。
8.如权利要求1~6任一所述的基于板材货物搬运用万能抓手,其特征在于:所述横向板的顶端转动安装有抽杆,且抽杆的外壁贴合横向板的顶壁;
9.如权利要求2所述的基于板材货物搬运用万能抓手,其特征在于:所述纵向板的顶端安装有与齿轮同心同轴的从动轮;
10.如权利要求1所述的基于板材货物搬运用万能抓手,其特征在于:所述齿板的顶部沿其板长方向开设有凹槽,且凹槽与支撑勾板滑动连接。
技术总结
本发明公开了一种基于板材货物搬运用万能抓手,涉及自动化搬运领域,包括水平输送滑轨、竖直驱动气缸和真空泵,还包括与所述竖直驱动气缸的伸缩轴连接的横向板;所述横向板的前后端均通过支撑勾板安装有两块可横向滑动的齿板,两块所述齿板的齿牙相对并处于同一水平面上,且两块所述齿板呈平行布置;所述齿板的底端等距均设有多组第一吸盘;其中,两块所述齿板相离横移展开后,其用于提升第一吸盘与板材之间的抓取面积;通过齿板可横移调节至横向板的外侧,并通过其底端连接的第一吸盘使用,适用于不同尺寸、不同重量的板材搬运使用,同时还可对两块板材同时搬运,实用性强。
技术研发人员:陆惠,汪显成,夏程锦
受保护的技术使用者:苏州研拓自动化科技有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!