一种基于数字孪生的门座起重机异常状态识别系统的制作方法
本发明属于门机异常识别,具体涉及一种基于数字孪生的门座起重机异常状态识别系统。
背景技术:
1、通用门座起重机为配备有可以更换的吊钩、抓斗等吊具,能满足港口装卸不同种类的件货、散料和集装箱要求的起重机,其主要用于港口码头或货场进行件杂货装卸作业,最常见的类型为四连杆组合臂架门座起重机。门座起重机作业工况复杂,在每个作业循环中都要承受反复制动的交变动载荷作用,设备自身受到冲击载荷大,长此以往会不同程度的对设备造成损伤。
2、由于门座起重机机型较大,通过本机实验进行故障测试不太现实,且当故障,尤其是联动故障出现的时候,排查较难。目前,当工作情况出现故障时,通常通过人工排查,耗时耗力,不仅排查辛苦,而且严重影响作业效率,更为甚者,还会对现场安全造成极大地隐患;且依靠技术人员经验的故障排查,不利于将故障原因进行整理,分类,甚至故障的分析与利用。另外,目前对于门机的设计都是基于一些复杂的cad图纸进行组装,且都是静态的模型,没法与门机运行数据进行实时交互,在故障与异常的分析上就缺乏实际,脱离了门座起重机本身的工况条件,已经不能适应现今港口行业的发展。目前也缺少一个系统能够把门机三维模型与门机实时数据进行交互。因此,为了更加直观的了解门机的实时运行状态,并且进行异常识别处理,有必要设计出一种可动态识别门座起重机异常状态的系统。
3、数字孪生是充分利用物理模型、传感器更新、运行历史等数据,集成多学科、多物理量、多尺度、多概率的仿真过程,在虚拟空间中完成映射,从而反映相对应的实体装备的全生命周期过程。简单来说,就是针对现实世界中的实体对象,在数字化世界中构建完全一致的对应模型,通过数字化的手段对实体对象进行动态仿真、监测、分析和控制。
4、构建门机数字孪生模型,能够高度还原门机的外形、材质、纹理细节等精密显示细节以及复杂内部结构,实现高精度、超精细的可视化渲染;同时还支持门机结构、复杂动作的全数据驱动显示,对门机位置分布、类型、运行环境、运行状态进行真实复现,不仅可以看到门机外部的变化,更重要的是可以看到门机内部的每一个零部件的工作状态,对设备运行异常(故障、短路冲击、过载、过温等)实时告警,辅助管理者直观掌握门机的运行状态,及时发现门机安全隐患。但是目前尚不存在将数字孪生理论与通用门座起重机结合的异常状态感知的系统。
技术实现思路
1、本发明所要解决的技术问题是针对上述现有技术的不足,提供一种基于数字孪生的门座起重机异常状态识别系统,不仅结合实际工况,而且还能以动画数字形态呈现门机的状态,在此基础上,可对门座起重机的孪生模型与数据进行识别、校验与分析,判断出门座起重机的异常状态,更重要的,该系统还可以将异常状态历史数据进行整理,形成可靠地数据库,为门座起重机乃至港口设备的发展奠定殷实的基础。
2、为实现上述技术目的,本发明采取的技术方案为:
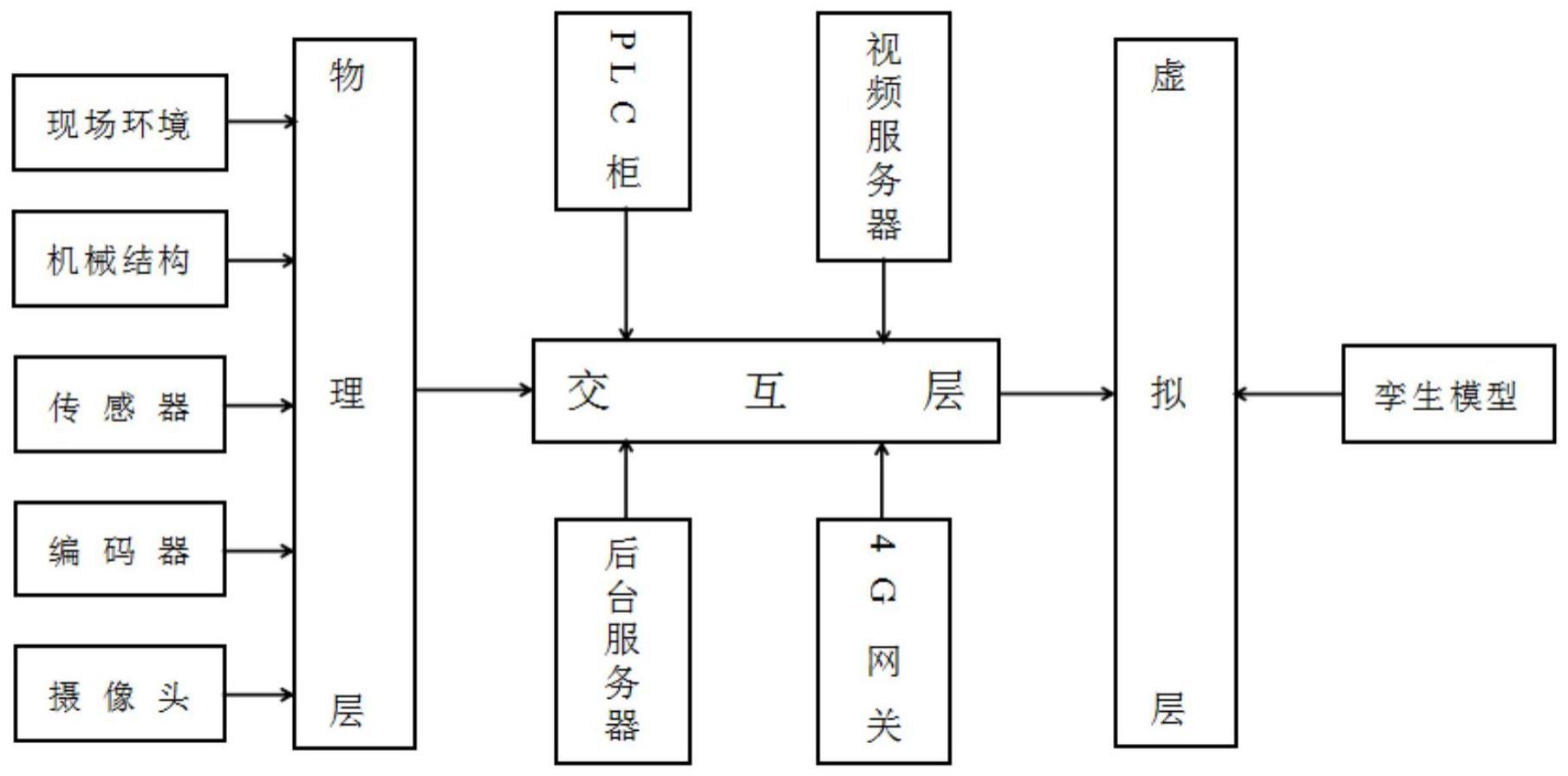
3、一种基于数字孪生的门座起重机异常状态识别系统,包括物理层、交互层和虚拟层;
4、所述物理层,用于采集门座起重机活动的场景数据、机械结构与尺寸以及运行参数;
5、所述交互层,用于接收并解析物理层采集到的数据,将数据传输至虚拟层并在数据传输过程中进行平滑、滤波和跳变数据处理,实现物理层与虚拟层的信息交互;
6、所述虚拟层,用于对门座起重机进行3d孪生模型建模,将交互层传输过来的各项数据对应到3d孪生模型输入端,实现模型的动态化,并对模型动作进行规范以进行门座起重机异常状态识别。
7、为优化上述技术方案,采取的具体措施还包括:
8、上述的门座起重机活动的场景数据包括门座起重机的行走地轨,河岸数据;
9、所述机械结构包括行走机构、旋转机构、变幅机构和起升机构,通过查询获取各机械结构与尺寸数据;
10、所述运行参数包括通过各类采集装置采集的门座起重机运行数据。
11、上述的各类采集装置包括:
12、载荷传感器,用于采集门座起重机的起吊货物重量数据;
13、转角传感器,用于采集门座起重机的旋转部分的旋转角度数据;
14、倾角传感器,用于采集门座起重机的臂架实时倾角的角度数据;
15、高度传感器,用于采集门座起重机吊起物体的高度数据;
16、编码器,用于采集各机构行进的距离;
17、运行时长采集模块,用于采集门座起重机主要机构的运行时长数据等。
18、摄像头,用于采集门座起重机视频。
19、上述的交互层包括plc系统、视频服务器、4g网关、孪生后台服务器和交换机;
20、其中,plc系统接受各传感器、编码器和运行时长采集模块的数据;
21、视频服务器读取摄像头的数据;
22、plc与视频服务器的数据通过交换机传输给孪生后台服务器,再通过4g网关,上传至云端服务器,为虚拟层提供信息服务。
23、上述的平滑处理是指:当数据出现片刻的丢失,而且丢失数据的数量处在预设范围时,按照经验数据来对丢失的数据进行补充;
24、所述滤波处理是指:将各项数据全部备份,使用降噪和去噪算法进行预处理;
25、所述跳变数据处理是指:如果数据大小超出预设值时,对其进行删除。
26、上述的对门座起重机进行3d孪生模型建模具体包括:
27、将门坐起重机模型各个机构的cad图纸导入到3dsmax中作为底图,按照cad图纸,采用3dsmax建模软件进行人工精确建模,然后为模型设置相应的材质和贴图;
28、将门坐起重机模型的不同部分分离成独立的对象,以让模型的不同部分具有不同的材质或贴图;
29、赋予材质前先给模型添加一个“uvw贴图”修改器,以产生正确的贴图坐标,材质设置完成后,为场景创建灯光和阴影,最后进行相应的渲染设置;
30、在使用3dsmax创建好图形以后,使用sdk软件开发包对图形进行封装处理,以接收来自4g网关发出的数据信息,通过websocket协议,将相应的后台服务器输出数据对应到孪生模型的输入端,实现3d孪生模型对标门座起重机动作。
31、上述的对模型动作进行规范以进行门座起重机异常状态识别具体包括:对模型的活动区域进行划定,对超出区域的状态进行识别;对门坐起重机动作的不当进行识别;对多台门坐起重机之间的异常识别;对门坐起重机内的各设备参数进行异常识别;对外部环境状态的异常识别。
32、上述的虚拟层还用于对异常状态历史数据进行整理,形成数据库;数据超过阈值时发生告警,实时展示告警状态信息并在3d孪生模型中标记具体位置。
33、本发明具有以下有益效果:
34、本发明设计了一种基于数字孪生的门座起重机异常状态识别系统,对于门座起重机外部的整体结构、内部的精细零部件以及运行动作可以进行可视化呈现和异常识别。
35、本发明基于数字孪生,对接设备传感器等相关业务数据接口,可以在三维场景中看到重点设备的实时采集数据,可以通过图表的方式展示设备的模型状态,解决了门机模型与门机运行数据难以实时对接的问题;还可在设备超过阈值时发生告警,可以实时展示设备告警状态信息并在三维模型中标记具体位置,进而可以辅助管理者更加直观掌握门机的运行状态,及时发现门机安全隐患。
- 还没有人留言评论。精彩留言会获得点赞!