起重机旋转抓取系统及方法与流程
本发明涉及起重设备,具体涉及起重机旋转抓取系统及方法。
背景技术:
1、随着工业的迅速发展,抓取设备也得到了快速的发展,抓取设备通常应用于工业制造过程中,例如用于抓取生产过程中的工件,虽然抓取设备的作用以及形态各有不同,但是都要求抓取设备能够精确且稳固地定位到三维(或二维)空间上的某一点进行作业,从而可以完成对指定物品的抓取和放置操作,减少人工操作。
2、现有技术中,抓取设备的结构复杂,抓取精度较低,导致抓取设备不能精确的抓取工件;另一方面,抓取工件后的稳固性较差,尤其是在抓取某些具有特殊形状的工件时,存在工件掉落的风险。
技术实现思路
1、为解决上述问题,本发明第一方面提供了一种起重机旋转抓取系统,用于抓取外周上分布有提取棒的容器,包括:
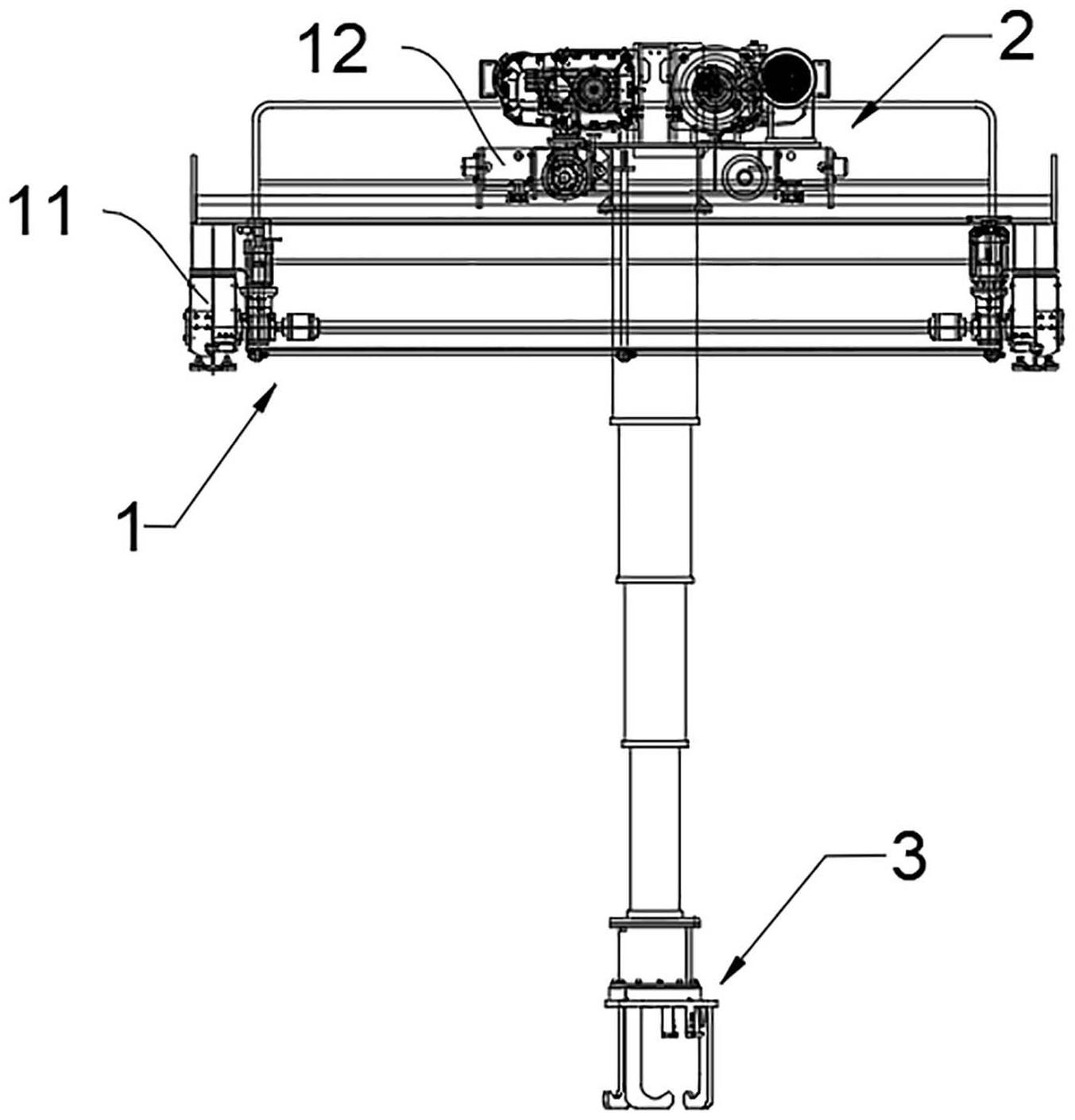
2、位移机构,与所述位移机构相连的升降机构,与所述升降机构相连的抓取机构,以及与所述位移机构、升降机构以及抓取机构交互连接的系统控制中心;
3、所述抓取机构包括:动力组件,以及与所述动力组件相连的抓取组件,所述动力组件用于传动抓取组件旋转;
4、所述抓取组件包括固定盘,以及设于所述固定盘上的多组抓取爪;
5、其中,所述抓取爪为l形结构,且所述抓取爪的水平段上设有与提取棒相配合的弧形提取槽;每组提取槽水平方向的中轴线相交,且相交点与所述抓取组件的旋转中心处于同一竖直线上;
6、所述抓取组件还包括:设于所述固定盘外周上的第一距离传感器及第二距离传感器;以及水平设于所述抓取爪的竖直段上的第三距离传感器;
7、其中,所述第二距离传感器设于两组抓取爪之间;
8、所述第一距离传感器用于测量所述抓取爪与地面或者容器之间的距离,所述第二距离传感器用于测量扇形范围内与提取棒之间的距离;所述第三距离传感器用于测量与提取棒之间的距离;
9、所述系统控制中心用于接收第一距离传感器反馈的数据并计算所述抓取爪与地面或者容器之间的高度差;所述系统控制中心还用于接收第二距离传感器反馈的数据并计算第二距离传感器与提取棒之间的直线距离;所述系统控制中心还用于接收第三距离传感器反馈的数据并计算第三距离传感器与提取棒之间的水平距离;所述系统控制中心还用于根据所述抓取爪与地面或者容器之间的高度差让升降机构停止放卷;所述系统控制中心还用于根据第二距离传感器与提取棒之间的直线距离让动力组件传动抓取爪进行旋转;所述系统控制中心还用于根据第二距离传感器与提取棒之间的直线距离停止让动力组件传动抓取爪进行旋转;所述系统控制中心还用于根据第三距离传感器与提取棒之间的水平距离停止让动力组件传动抓取爪进行旋转。
10、可选地,所述抓取机构还包括:
11、固定座,所述固定座与升降机构相连;
12、回转支撑组件,所述回转支撑组件与固定座相连,所述回转支撑组件还与所述抓取组件相连以固定抓取组件。
13、可选地,所述回转支撑组件为回转支撑轴承;
14、所述回转支撑组件的外圈与固定座相连;
15、所述回转支撑组件的内圈与外圈滑动连接,并与所述抓取组件相连;
16、所述回转支撑组件的内圈上设有圆形轮齿,所述圆形轮齿与动力组件相连。
17、可选地,所述抓取爪的数量为三组;
18、任意两组弧形提取槽水平方向上的中轴线之间的夹角为120°。
19、可选地,所述位移机构包括第一行走机构,以及与所述第一行走机构相连的第二行走机构,所述第一行走机构及第二行走机构用于传动升降机构及抓取机构进行位移,且所述第一行走机构的位移方向与第二行走机构的位移方向相互垂直。
20、本发明第二方面提供了一种起重机旋转抓取方法,采用上述方案中任一项所述的起重机旋转抓取系统进行抓取,包括以下步骤:
21、平面定位,将升降机构及抓取机构与容器上下对齐;
22、初次下降,所述升降机构传动抓取机构初次下降;
23、干涉判断,判断所述抓取爪与容器的提取棒是否发生干涉;
24、再次下降,所述升降机构传动抓取机构再次下降;
25、抓取爪回转,所述动力组件传动抓取爪进行旋转,将抓取爪的提取槽旋转至提取棒的正下方。
26、可选地,所述干涉判断步骤还包括:
27、干涉调整,通过动力组件传动抓取爪进行旋转的方式,使抓取爪与提取棒不发生干涉;
28、所述干涉调整步骤包括:动力组件传动固定盘及抓取爪进行旋转;第二距离传感器与提取棒之间的直线距离小于第一预设距离临界值时,所述系统控制中心停止让动力组件传动抓取爪进行旋转。
29、可选地,所述干涉判断包括:
30、1、若第二距离传感器与提取棒之间的直线距离大于第二预设距离临界值时,则发生干涉,进入干涉调整步骤;
31、2、若第二距离传感器与提取棒之间的直线距离小于第二预设距离临界值时,则不发生干涉,进入再次下降步骤。
32、可选地,所述初次下降步骤包括:升降机构放卷传动抓取机构下降;所述抓取爪与地面或者容器之间的高度差小于第一预设高度临界值时,所述系统控制中心让升降机构停止放卷,且所述抓取机构位于容器的上方;
33、所述再次下降步骤包括:升降机构放卷传动抓取机构下降;所述抓取爪与地面或者容器之间的高度差小于第二预设高度临界值时,所述系统控制中心让升降机构停止放卷,且所述抓取爪的水平段位于提取棒下方。
34、可选地,所述抓取爪回转步骤包括:动力组件传动抓取爪进行旋转;所述第三距离传感器与提取棒之间的水平距离小于第三预设距离临界值时,所述系统控制中心停止让动力组件传动抓取爪进行旋转。
35、通过采用上述技术方案,本发明主要具有以下技术效果:
36、1、通过设置具有提取槽的l形抓取爪,以及通过在抓取组件上设置第三距离传感器,利用动力组件传动抓取爪旋转,将抓取爪的提取槽精确旋转至提取棒的下方,然后将提取槽与提取棒相连后再抓取容器,从而增强抓取爪抓取容器并进行转运过程中的稳定性,从而降低容器从抓取机构上掉落的可能性,解决了抓取设备抓取精度低以及抓取工件后的稳固性差的技术问题,实现了精确且稳固抓取工件的技术效果。
37、2、通过在抓取组件上设置第一距离传感器及第二距离传感器,利用系统控制中心调整抓取组件下降的高度,以及判断抓取爪与提取棒是否发生干涉,并通过系统控制中心对发生干涉后的抓取爪位置进行调整,从而将带提取棒的容器精确抓取,降低发生事故的可能性。
技术特征:
1.一种起重机旋转抓取系统,用于抓取外周上分布有提取棒的容器,其特征在于,包括:
2.根据权利要求1所述的一种起重机旋转抓取系统,其特征在于,所述抓取机构还包括:
3.根据权利要求2所述的一种起重机旋转抓取系统,其特征在于,所述回转支撑组件为回转支撑轴承;
4.根据权利要求1所述的一种起重机旋转抓取系统,其特征在于,所述抓取爪的数量为三组;任意两组弧形提取槽水平方向上的中轴线之间的夹角为120°。
5.根据权利要求1所述的一种起重机旋转抓取系统,其特征在于,所述位移机构包括第一行走机构,以及与所述第一行走机构相连的第二行走机构,所述第一行走机构及第二行走机构用于传动升降机构及抓取机构进行位移,且所述第一行走机构的位移方向与第二行走机构的位移方向相互垂直。
6.一种起重机旋转抓取方法,其特征在于,采用权利要求1-5中任一项所述的起重机旋转抓取系统进行抓取,包括以下步骤:
7.根据权利要求6所述的一种起重机旋转抓取方法,其特征在于,所述干涉判断步骤还包括:
8.根据权利要求7所述的一种起重机旋转抓取方法,其特征在于,所述干涉判断包括:
9.根据权利要求6所述的一种起重机旋转抓取方法,其特征在于,所述初次下降步骤包括:升降机构放卷传动抓取机构下降;所述抓取爪与地面或者容器之间的高度差小于第一预设高度临界值时,所述系统控制中心让升降机构停止放卷,且所述抓取机构位于容器的上方;
10.根据权利要求6所述的一种起重机旋转抓取方法,其特征在于,所述抓取爪回转步骤包括:动力组件传动抓取爪进行旋转;所述第三距离传感器与提取棒之间的水平距离小于第三预设距离临界值时,所述系统控制中心停止让动力组件传动抓取爪进行旋转。
技术总结
本发明公开了一种起重机旋转抓取系统及方法,属于起重设备技术领域,包括:位移机构,与所述位移机构相连的升降机构,与所述升降机构相连的抓取机构,以及与所述位移机构、升降机构以及抓取机构交互连接的系统控制中心;所述抓取机构包括:动力组件,以及与所述动力组件相连的抓取组件,所述动力组件用于传动抓取组件旋转;所述抓取组件包括固定盘,以及设于所述固定盘上的多组抓取爪。本发明解决了抓取设备抓取精度低以及抓取工件后的稳固性差的技术问题,实现了精确且稳固抓取工件的技术效果。
技术研发人员:彭海波,肖斌,邓奇志,丁洪,刘涛,颜仁东,陈春林,唐世军
受保护的技术使用者:四川沱江起重机有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!