一种水泵夹持翻转机构及其工作方法与流程
本发明涉及一种机构及其工作方法,尤其是涉及一种水泵夹持翻转机构及其工作方法,它属于水泵入包装箱。
背景技术:
1、立式多级泵组装完成后,一般为立式放置,而要将该泵放进包装箱内,需要平躺放置,需要将该泵在空中翻转90°后,再放入包装箱,传统方式采用人力将水泵抬抱后放进包装箱内,导致工人劳动强度非常大。
2、故有必要开发一种能够节省人力的装置,将水泵依靠机械装置在空中翻转后,直接放入包装箱内。申请人根据生产落后现状,开发一种可以夹持水泵后在空中翻转的机构。该机构配合助力机械臂或机器人使用,由于助力机械臂或机器人为成熟配套设备,本申请重点描述水泵夹持翻转机构。
3、公开日为2022年07月26日,公开号为cn217046321u的中国专利中,公开了一种名称为“一种核电厂应急柴油机高低温水泵夹持翻转工具”的实用新型专利。该工具包括上部组件与下部组件,其中,上部组件包括支承板、连接部和法兰压板,支承板呈弧形,端部设有法兰压板;支承板还设有连接部,以连接上部组件与下部组件;下部组件包括支撑筒体和连接部安装孔,支撑筒体为柱形结构,顶部设有连接部安装孔以安装上部组件。虽然该装置的使用改变了以往传统检修过程中将泵体置于地面翻转的情况,减少对泵体的伤害与污染,但是不能适用于本申请的水泵,故其还是存在上述缺陷。
技术实现思路
1、本发明的目的在于克服现有技术中存在的上述不足,而提供一种结构设计合理,稳定可靠,故障率低,安全性高,有效提高了水泵入箱效率,操作方便的水泵夹持翻转机构及其工作方法。
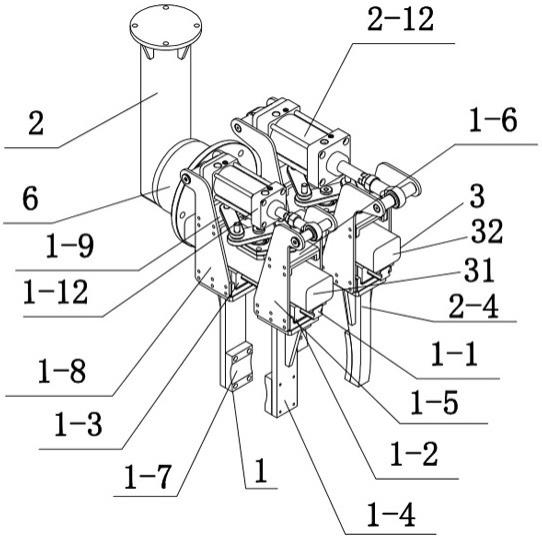
2、本发明解决上述问题所采用的技术方案是:该一种水泵夹持翻转机构,包括机架座,其特征在于:还包括h型主梁和多套同步夹持机构,所述h型主梁的两侧分别设置一套结构相同的同步夹持机构,每个同步夹持机构均包括1号直线导轨、1号滑块左、1号滑块右、1号夹爪左、1号连接板左、1号连接板支撑板左、1号夹爪右、1号连接板右、1号连接板支撑板右、二级同步连杆、一级同步连杆和1号夹持气缸,h型主梁的1号梁一面设置有1号直线导轨,该1号直线导轨上设置有与其配套的1号滑块左和1号滑块右;1号滑块左的正面安装面安装有1号夹爪左,1号滑块左的两侧面安装面分别安装有对称布置的1号连接板左,两块1号连接板左之间设置有1号连接板支撑板左,二级同步连杆一端与1号连接板支撑板左连接;1号滑块右的正面安装面安装有1号夹爪右,1号滑块右的两侧面安装面分别安装有对称布置的1号连接板右,两块1号连接板右之间设置有1号连接板支撑板右,另一个二级同步连杆一端与1号连接板支撑板右连接;1号直线导轨安装面的背面设置有一级同步连杆,一级同步连杆的一端与其中一根二级同步连杆的一端连接,一级同步连杆的另一端与另一根二级同步连杆的一端连接;1号夹持气缸尾端和1号连接板右连接,活塞杆端与1号连接板左连接。
3、作为优选,本发明还包括限位支撑,h型主梁的端梁上设置有限位支撑;可以对夹爪夹持水泵的伸入度进行限位。
4、作为优选,本发明所述一级同步连杆的几何中心与1号梁背面铰接方式连接。
5、本发明还提供一种水泵夹持翻转机构的工作方法,其特征在于:具体步骤如下:初始状态:两套同步夹持机构处于水平位置,1号夹持气缸和2号夹持气缸的活塞杆均处于伸出状态,即1号夹爪左、1号夹爪右、2号夹爪左、2号夹爪右均处于水平最大开启状态;组装完成竖直放置的水泵输送至下泵工位后,静止在生产线上;助力机械臂或机器人控制夹持翻转机构从指定高度水平移动,用1号夹爪和2号夹爪套住水泵,直至限位支撑抵牢水泵表面,翻转夹持机构停止水平移动,紧接着,1号夹持气缸和2号夹持气缸的活塞杆收回,1号夹爪和2号夹爪收紧,牢牢夹持住水泵;助力机械臂或机器人控制夹持翻转机构把水泵从下泵工位提起至一定高度,使水泵完全处于在空中竖直状态,旋转驱动启动,驱动h型主梁在空中翻转90°,即使水泵在空中翻转90°,满足入箱状态;助力机械臂或机器人再次控制夹持翻转机构将水泵转移至包装箱内,确保水泵到位后,1号夹持气缸和2号夹持气缸活塞杆伸出,1号夹爪和2号夹爪张开,松开水泵,翻转夹持机构回到空间初始位,等待下一轮工作。
6、本发明与现有技术相比,具有以下优点和效果:整体机构设计合理,故障率低,安全性高;解决了立式多级泵入箱依靠人工搬运、翻转的难题,提高了泵企的生产水平;由机械动作代替人工动作,有效地提高了水泵入箱的效率,满足使用需求。
技术特征:
1.一种水泵夹持翻转机构,包括机架座(2),其特征在于:还包括h型主梁(3)和多套同步夹持机构(1),所述h型主梁(3)的两侧分别设置一套结构相同的同步夹持机构(1),每个同步夹持机构(1)均包括1号直线导轨(1-1)、1号滑块左(1-2)、1号滑块右(1-3)、1号夹爪左(1-4)、1号连接板左(1-5)、1号连接板支撑板左(1-6)、1号夹爪右(1-7)、1号连接板右(1-8)、1号连接板支撑板右(1-9)、二级同步连杆(1-10)、一级同步连杆(1-11)和1号夹持气缸(1-12),h型主梁(3)的1号梁(31)一面设置有1号直线导轨(1-1),该1号直线导轨(1-1)上设置有与其配套的1号滑块左(1-2)和1号滑块右(1-3);1号滑块左(1-2)的正面安装面安装有1号夹爪左(1-4),1号滑块左(1-2)的两侧面安装面分别安装有对称布置的1号连接板左(1-5),两块1号连接板左(1-5)之间设置有1号连接板支撑板左(1-6),二级同步连杆(1-10)一端与1号连接板支撑板左(1-6)连接;1号滑块右(1-3)的正面安装面安装有1号夹爪右(1-7),1号滑块右(1-3)的两侧面安装面分别安装有对称布置的1号连接板右(1-8),两块1号连接板右(1-8)之间设置有1号连接板支撑板右(1-9),另一个二级同步连杆(1-10)一端与1号连接板支撑板右(1-9)连接;1号直线导轨(1-1)安装面的背面设置有一级同步连杆(1-11),一级同步连杆(1-11)的一端与其中一根二级同步连杆(1-10)的一端连接,一级同步连杆(1-11)的另一端与另一根二级同步连杆(1-10)的一端连接;1号夹持气缸(1-12)尾端和1号连接板右(1-8)连接,活塞杆端与1号连接板左(1-5)连接。
2.根据权利要求1所述的水泵夹持翻转机构,其特征在于:还包括限位支撑(4),h型主梁(3)的端梁上设置有限位支撑(4)。
3.根据权利要求1所述的水泵夹持翻转机构,其特征在于:所述一级同步连杆(1-10)的几何中心与1号梁(31)背面铰接方式连接。
4.一种水泵夹持翻转机构的工作方法,采用权利要求1-3任意一项所述的水泵夹持翻转机构,其特征在于:具体步骤如下:
技术总结
本发明涉及一种水泵夹持翻转机构及其工作方法,它属于水泵入包装箱技术领域。本发明包括机架座、H型主梁和多套同步夹持机构,H型主梁的两侧分别设置一套结构相同的同步夹持机构,1号直线导轨上设置有1号滑块左和1号滑块右,1号滑块左上安装有1号夹爪左,1号滑块左的两侧面分别安装有对称布置的1号连接板左,两块1号连接板左之间设置有1号连接板支撑板左,1号滑块右上安装有1号夹爪右,1号滑块右的两侧面分别安装有对称布置的1号连接板右,两块1号连接板右之间设置有1号连接板支撑板右,该发明机构设计合理,故障率低,安全性高,提高了泵企的生产水平,由机械动作代替人工动作,有效地提高了水泵入箱的效率,满足使用需求。
技术研发人员:刘同帮,潘东杰,夏小江,应浩,高强,朱丹,朱国,汤瑶,张陈
受保护的技术使用者:浙江省机电设计研究院有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!