分布式自组网智能垃圾箱用垃圾识别系统的制作方法
本发明属于智能垃圾箱垃圾识别的,具体涉及分布式自组网智能垃圾箱用垃圾识别系统。
背景技术:
1、智能垃圾箱是一种配备有物联网技术、传感器、智能识别等技术手段的垃圾桶。它可以实现自动分类、管理和处理垃圾,并且可以提供实时监测和管理。
2、垃圾袋总体上通过四种颜色区分,其中干垃圾(黑)、湿垃圾(咖)、可回收垃圾(蓝)、有害垃圾(红),现有的智能垃圾箱无法自动识别出垃圾袋的颜色从而选择不同垃圾箱,导致垃圾无法分类。该现象成为本领域人员亟待解决的问题。
技术实现思路
1、本发明的目的在于提供分布式自组网智能垃圾箱用垃圾识别系统,以解决上述背景技术中提出的问题。
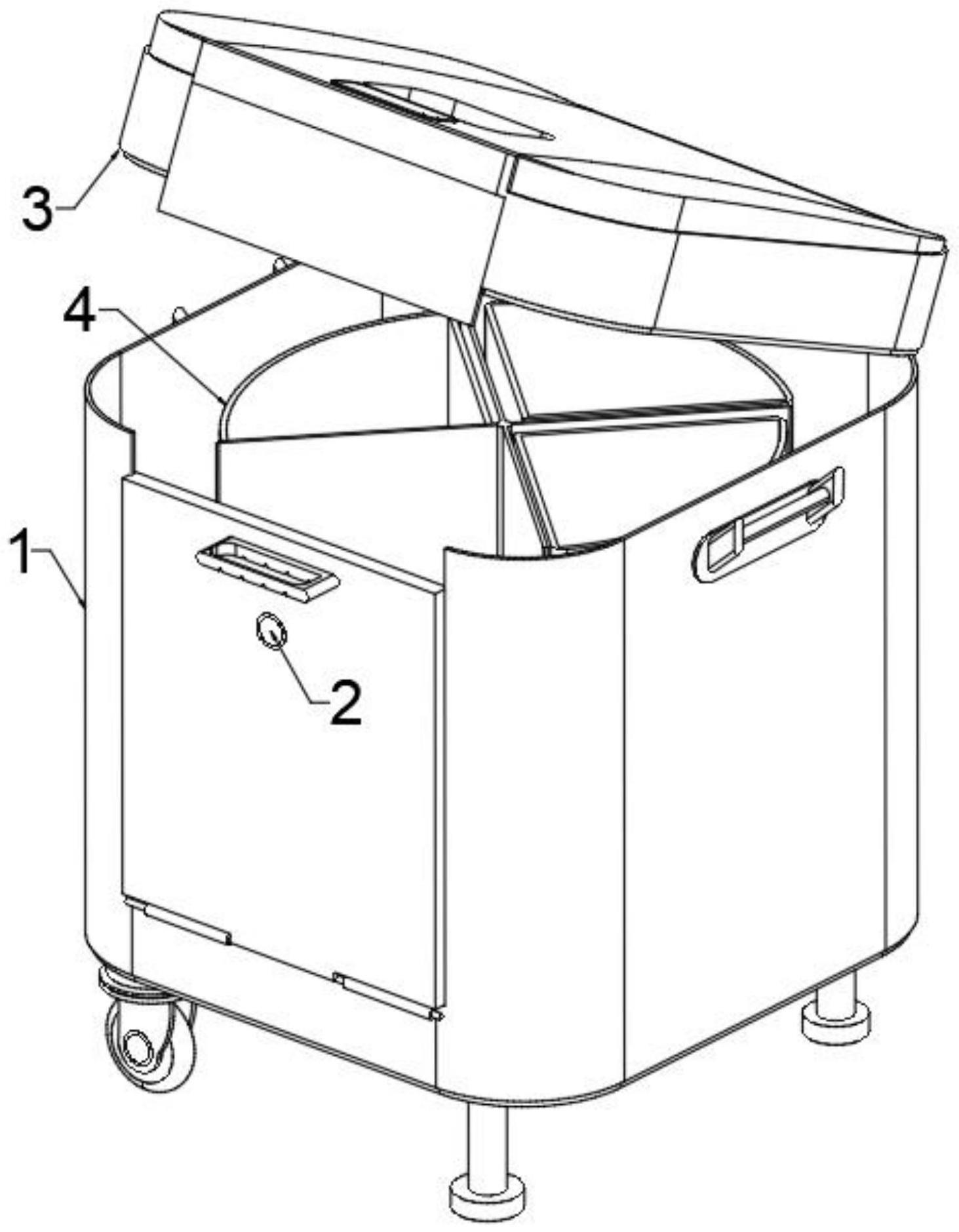
2、为了解决上述技术问题,本发明提供如下技术方案:分布式自组网智能垃圾箱用垃圾识别系统,包括分布式自组网智能垃圾箱以及垃圾识别系统,所述分布式自组网智能垃圾箱包括箱体、摄像头、电动盖板、四个垃圾腔以及驱动机构;
3、所述摄像头固定安装于箱体的前侧,所述电动盖板轴连接于箱体的上方,四个所述垃圾腔的底部固定安装有支板;
4、所述支板的底部固定安装有滑轮一,所述滑轮一的底部固定有转杆,所述转杆与箱体的内壁底部轴承连接;
5、所述驱动机构与滑轮一连接,且与垃圾识别系统电性连接,所述垃圾识别系统与摄像头电性连接,所述摄像头与电动盖板电性连接。
6、本发明进一步说明,所述驱动机构包括电机、转轴以及滑轮二;
7、所述电机固定安装于箱体的底部,所述转轴与电机的输出端固定连接,所述滑轮二与滑轮一之间履带连接;
8、所述垃圾识别系统与电机电性连接。
9、本发明进一步说明,所述垃圾识别系统包括图像识别模块、颜色判断模块以及驱动模块,所述图像识别模块设置于摄像头的内部,且分别与颜色判断模块以及电动盖板电性连接,所述驱动模块分别与电机以及颜色判断模块电性连接;
10、所述图像识别模块用于识别垃圾袋,并控制电动盖板的打开与关闭,所述颜色判断模块用于判断垃圾袋的颜色,所述驱动模块用于根据垃圾袋的颜色控制电机的转动角度。
11、本发明进一步说明,所述垃圾识别系统包括以下运行步骤:
12、步骤s1、垃圾识别系统运行;
13、步骤s2、图像识别模块根据摄像头对垃圾袋进行识别,识别到垃圾袋后驱动电动盖板打开,同时颜色判断模块判断出垃圾袋的颜色,并根据垃圾袋颜色,通过驱动模块控制电机的转动角度;
14、步骤s3、垃圾袋投入垃圾腔后,摄像头识别不到垃圾袋电驱动使电动盖板关闭,完成垃圾投放工作。
15、本发明进一步说明,所述步骤s2中:
16、电机的转动角度变化,控制四个垃圾腔的位置,针对不同颜色的垃圾,区别投放到不同的垃圾腔中,实现垃圾分类。
17、本发明进一步说明,所述驱动机构包括气压腔、气压板、气压杆、挤压杆以及润滑腔;
18、所述气压腔固定安装于箱体的内壁底部,所述气压板与气压腔的内壁滑动连接,所述气压杆固定安装于气压板的一侧,且外端位于气压腔的外侧;
19、所述挤压杆固定安装于转轴的外侧,且与气压杆对齐,所述挤压杆以及气压杆的外端均为圆弧形;
20、所述气压腔与润滑腔管道连接,且管道内设置有压力阀,所述润滑腔固定安装于箱体的内壁底部,且右侧管道连接有输液管;
21、所述输液管的外端位于转杆的一侧。
22、本发明进一步说明,所述气压板与气压腔的内壁底部弹簧连接,所述气压腔与外界管道连接,且管道内设置有单向阀,所述润滑腔的内部填充有润滑剂。
23、与现有技术相比,本发明所达到的有益效果是:本发明采用垃圾识别系统控制垃圾腔的位置,四个垃圾腔放置不同种类的垃圾,而垃圾袋的颜色表示垃圾的种类,便于自动区分垃圾种类,提高垃圾分类质量,方便快捷,改善智能垃圾箱的使用效果,同时通过驱动机构使得润滑剂通过输液管挤压到转杆的外侧,落到转杆与箱体内壁底部的轴承处,使得其转动过程中得到润滑,提高运行效率和运行质量,同时垃圾腔每改变几次位置后,排放一次润滑剂,既能够产生润滑效果,又能够降低润滑剂的消耗,节省运行成本。
技术特征:
1.分布式自组网智能垃圾箱用垃圾识别系统,包括分布式自组网智能垃圾箱以及垃圾识别系统,其特征在于:所述分布式自组网智能垃圾箱包括箱体(1)、摄像头(2)、电动盖板(3)、四个垃圾腔(4)以及驱动机构;
2.根据权利要求1所述的分布式自组网智能垃圾箱用垃圾识别系统,其特征在于:所述驱动机构包括电机(8)、转轴(9)以及滑轮二(10);
3.根据权利要求2所述的分布式自组网智能垃圾箱用垃圾识别系统,其特征在于:所述垃圾识别系统包括图像识别模块、颜色判断模块以及驱动模块,所述图像识别模块设置于摄像头(2)的内部,且分别与颜色判断模块以及电动盖板(3)电性连接,所述驱动模块分别与电机(8)以及颜色判断模块电性连接;
4.根据权利要求3所述的分布式自组网智能垃圾箱用垃圾识别系统,其特征在于:所述垃圾识别系统包括以下运行步骤:
5.根据权利要求4所述的分布式自组网智能垃圾箱用垃圾识别系统,其特征在于:所述步骤s2中:
6.根据权利要求5所述的分布式自组网智能垃圾箱用垃圾识别系统,其特征在于:所述驱动机构包括气压腔(11)、气压板(12)、气压杆(13)、挤压杆(14)以及润滑腔(15);
7.根据权利要求6所述的分布式自组网智能垃圾箱用垃圾识别系统,其特征在于:所述气压板(12)与气压腔(11)的内壁底部弹簧连接,所述气压腔(11)与外界管道连接,且管道内设置有单向阀,所述润滑腔(15)的内部填充有润滑剂。
技术总结
本发明属于智能垃圾箱垃圾识别的技术领域,具体涉及分布式自组网智能垃圾箱用垃圾识别系统,其中包括分布式自组网智能垃圾箱以及垃圾识别系统,所述分布式自组网智能垃圾箱包括箱体、摄像头、电动盖板、四个垃圾腔以及驱动机构;所述摄像头固定安装于箱体的前侧,所述电动盖板轴连接于箱体的上方,四个所述垃圾腔的底部固定安装有支板;所述支板的底部固定安装有滑轮一,所述滑轮一的底部固定有转杆,所述转杆与箱体的内壁底部轴承连接;所述驱动机构与滑轮一连接,且与垃圾识别系统电性连接,所述垃圾识别系统与摄像头电性连接,所述摄像头与电动盖板电性连接,该装置解决了当前垃圾箱无法自动识别垃圾,从而进行较好的分类工作的问题。
技术研发人员:高晓宏
受保护的技术使用者:江苏翼迅在线科技发展有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!