一种塔机顶升全过程载荷动态平衡的控制方法及系统与流程
本发明涉及一种塔机顶升全过程载荷动态平衡的控制方法及系统,属于塔机顶升平衡。
背景技术:
1、塔机顶升过程中力矩配平问题至关重要,配平与否将直接影响顶升作业的安全问题,如若不能配平轻则损伤机构降低塔机结构强度,重则导致整机倾覆,危及操作人员生命安全,同时也将带来巨大的经济损失。对于大吨位塔机,在顶升过程中引进标节的位置将对配平力矩产生重要影响,为确保顶升作业的顺利安全进行需将引进标节对配平影响考虑在内。
2、目前的塔机顶升配平方式主要依靠人为操作控制,根据具体机型的配平力矩选择配平重量及配平幅度,然后根据操作人员的经验或依靠倾角仪等简单辅助设备进项相应的调整,精度较低无具体量化形式;
3、一是依靠具体机型的配平力矩选择配平重量及配平幅度,然后根据操作人员的经验或依靠倾角仪等简单辅助设备进项相应的调整,精度较低无具体量化形式;
4、二是在塔机顶升配平未考虑引进标节对配平影响的问题。
技术实现思路
1、本发明的目的在于提供一种塔机顶升全过程载荷动态平衡的控制方法及系统,以解决现有技术主要依靠人为操作控制,根据操作人员的经验或依靠倾角仪等简单辅助设备进项相应的调整,精度较低无具体量化形式的缺陷。
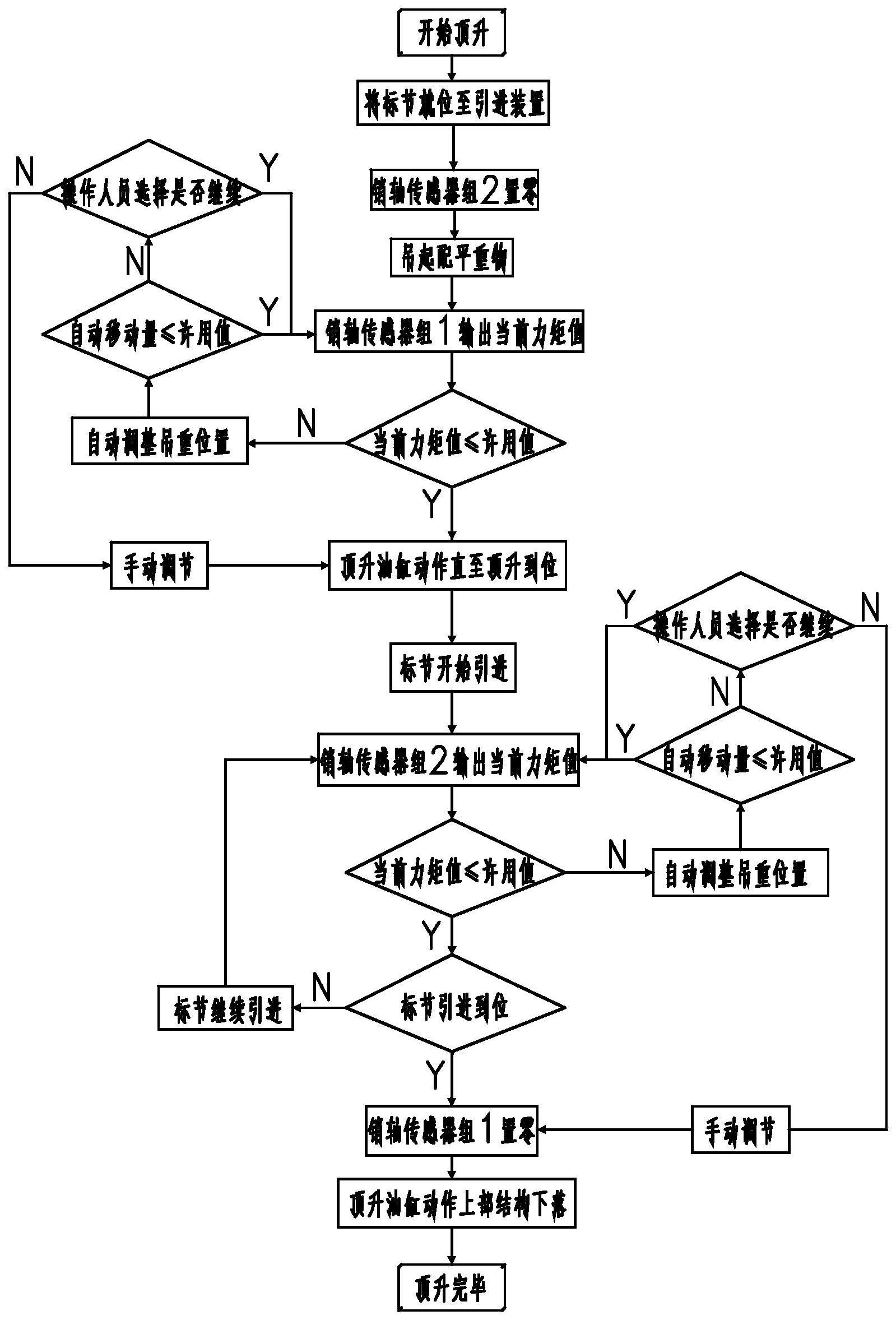
2、一种塔机顶升全过程载荷动态平衡的控制方法,由主控制器执行,所述方法包括:
3、s1、将标节就位至引进装置;
4、s2、获取塔身顶部与上部结构连接处的当前输出力矩值一;
5、s3、判断当前力矩值一是否小于等于许用值,若小于许用值,顶升到指定位置;
6、s4、获取爬升架与上部结构连接处的当前力矩值二;
7、s5、判断当前力矩值二是否小于等于许用值,若小于许用值判断标节是否引进到位,若到位顶升油缸动作,上部结构下落到位,完成顶升过程。
8、进一步地,判断当前力矩值一是否小于等于许用值,若小于许用值选择是否开始顶升,若大于许用值塔机将开始自动调整吊重位置。
9、进一步地,判断自动移动量是否大于许用值;
10、若自动移动量大于许用值,确认是否继续,若选择继续则返回步骤s2,若选择结束则切换至手动模式。
11、进一步地,判断自动移动量是否大于许用值,若自动移动量小于许用值则执行步骤s2。
12、进一步地,判断当前力矩值二是否小于等于许用值,若大于塔机将开始自动调整吊重位置,则判断自动移动量是否超过许用值,若小于许用值,则执行步骤s4,若大于许用值,选择继续将执行步骤s4,选择结束则切换至手动模式。
13、进一步地,所述步骤s2包括:
14、通过安装在塔身顶部与上部结构连接处的传感器组根据测点的受力值计算塔机上部结构的实时力矩值一。
15、进一步地,所述步骤s4包括:
16、通过安装在爬升架与上部结构连接处的传感器组根据测点的受力值计算塔机上部结构的实时力矩值二。
17、进一步地,所述传感器组至少包括两个销轴传感器。
18、一种塔机顶升全过程载荷动态平衡的控制系统,所述系统包括:
19、数据获取模块一,用于获取塔身顶部与上部结构连接处的当前输出力矩值一;
20、数据获取模块二,用于获取爬升架与上部结构连接处的当前输出力矩值二;
21、信号处理模块,用于接收数据获取模块一和数据获取模块二的信号,并将信号放大后发送给主控制器;
22、主控制器,用于判断数据获取模块一获取的当前输出力矩值一及数据获取模块二获取的当前输出力矩值二是否满足许用值;
23、执行模块,用于接收主控制器的指令,根据主控制器的指令控制顶升油缸。
24、进一步地,所述数据获取模块一为安装在塔身顶部与上部结构连接处的传感器组一,所述数据获取模块二为安装在爬升架与上部结构连接处的传感器组二。
25、与现有技术相比,本发明所达到的有益效果:本发明采用多组销轴传感器组,对塔机顶升全过程载荷实时输出并进行调节,实现顶升全过程动态配平控制;
26、本发明在通过在爬升架与上部结构连接处的传感器组二实时采集塔机顶升过程中引进标节位置变化的力矩值,提高配平过程的载荷动态平衡;
技术特征:
1.一种塔机顶升全过程载荷动态平衡的控制方法,由主控制器执行,其特征在于,所述方法包括:
2.根据权利要求1所述的塔机顶升全过程载荷动态平衡的控制方法,其特征在于,判断当前力矩值一是否小于等于许用值,若小于许用值选择是否开始顶升,若大于许用值塔机将开始自动调整吊重位置。
3.根据权利要求2所述的塔机顶升全过程载荷动态平衡的控制方法,其特征在于,判断自动移动量是否大于许用值;
4.根据权利要求3所述的塔机顶升全过程载荷动态平衡的控制方法,其特征在于,判断自动移动量是否大于许用值,若自动移动量小于许用值则执行步骤s2。
5.根据权利要求1所述的塔机顶升全过程载荷动态平衡的控制方法,其特征在于,判断当前力矩值二是否小于等于许用值,若大于塔机将开始自动调整吊重位置,则判断自动移动量是否超过许用值,若小于许用值,则执行步骤s4,若大于许用值,选择继续将执行步骤s4,选择结束则切换至手动模式。
6.根据权利要求1所述的塔机顶升全过程载荷动态平衡的控制方法,其特征在于,所述步骤s2包括:
7.根据权利要求1所述的塔机顶升全过程载荷动态平衡的控制方法,其特征在于,所述步骤s4包括:
8.根据权利要求6或7所述的塔机顶升全过程载荷动态平衡的控制方法,其特征在于,所述传感器组至少包括两个销轴传感器。
9.一种塔机顶升全过程载荷动态平衡的控制系统,其特征在于,所述系统包括:
10.根据权利要求9所述的塔机顶升全过程载荷动态平衡的控制系统,其特征在于,所述数据获取模块一为安装在塔身顶部与上部结构连接处的传感器组一,所述数据获取模块二为安装在爬升架与上部结构连接处的传感器组二。
技术总结
本发明公开了一种塔机顶升全过程载荷动态平衡的控制方法,由主控制器执行,所述方法包括:S1、将标节就位至引进装置;S2、获取塔身顶部与上部结构连接处的当前输出力矩值一;S3、判断当前力矩值一是否小于等于许用值,若小于许用值,顶升到指定位置;S4、获取爬升架与上部结构连接处的当前力矩值二;S5、判断当前力矩值二是否小于等于许用值,若小于许用值判断标节是否引进到位,若到位顶升油缸动作,上部结构下落到位,完成顶升过程。本发明还公开了一种塔机顶升全过程载荷动态平衡的控制系统。本申请采用多组销轴传感器组,对塔机顶升全过程载荷实时输出并进行调节,实现顶升全过程动态配平控制。
技术研发人员:米成宏,郑怀鹏,黄帅
受保护的技术使用者:徐州建机工程机械有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!