一种气吸式拾取粮食落粒的智能小车及拾取方法
本发明属于粮食收集,尤其涉及一种气吸式拾取粮食落粒的智能小车及方法。
背景技术:
1、粮食装卸运输损耗主要集中在三个方面,一是卸粮“遗漏”,即卸粮不干净,遗漏在运输工具中;二是装卸“抛撒”,装卸或过驳过程,无论利用粮食传输带还是抓斗,都会将少部分粮食抛撒在火车站、码头或江海中;三是装卸“破碎”,装卸过程中机械碾压或碰撞,有时会造成粮食颗粒破碎,尤其是集装箱开始装粮阶段,粮食高位落入集装箱底部,与集装箱壁碰撞,造成一定破损;在这三个节点中,损耗相对较多的是“抛撒”,其他两个节点产生的损耗较少。在出现如上问题的情况下,其造成的粮食损失也是十分巨大的。
2、现阶段对粮食落粒的拾取方法主要采用人工拾取,工作人员拿着清理工具进行工作,所以人工处理集中粮食落粒,常常会出现落粒遗漏处理不全、位于边角处的落粒不好处理等问题。
3、目前虽然已经出现了能够自动拾取粮食落粒的机械,但是不够智能,针对粮食落粒的分散情况,拾取效率仍然不够高。尤其是在粮食装卸过程中,往往是以一些固定地方为中心,分散出现粮食落粒。如果针对每个单独落粒都进行单独移动拾取,拾取效率往往会十分低下。
4、因此,目前亟需一种能够高效率拾取粮食落粒的设备。
技术实现思路
1、针对上述技术问题,本发明的一个方式的目的之一是提供一种气吸式拾取粮食落粒的智能小车,采用视觉传感器,采集周围图像信息,识别粮食落粒,再自动移动小车,到达粮食落粒位置进行拾取。本发不需要人工参与即可自动拾取粮食落粒,大大节省了人工成本。
2、本发明的一个方式的目的之一是是提供一种气吸式拾取粮食落粒的智能小车,到达粮食落粒位置后,控制吸头在吸头拾取范围内有粮食落粒处移动,吸取拾取范围内所有粮食落粒,仅需移动一次小车,即可拾取大范围内所有粮食落粒,不需要智能小车逐次移动,大大提高了工作效率,节省了工作时间。
3、本发明的一个方式的目的之一是提供一种气吸式拾取粮食落粒的智能小车的拾取方法,采用先移动小车,再移动吸头的步骤,可以做到每次拾取大范围内所有粮食落粒,不需要智能小车逐次移动,大大提高了工作效率,节省了工作时间。
4、注意,这些目的的记载并不妨碍其他目的的存在。本发明的一个方式并不需要实现所有上述目的。可以从说明书、附图、权利要求书的记载中抽取上述目的以外的目的。
5、本发明是通过以下技术手段实现上述技术目的的。
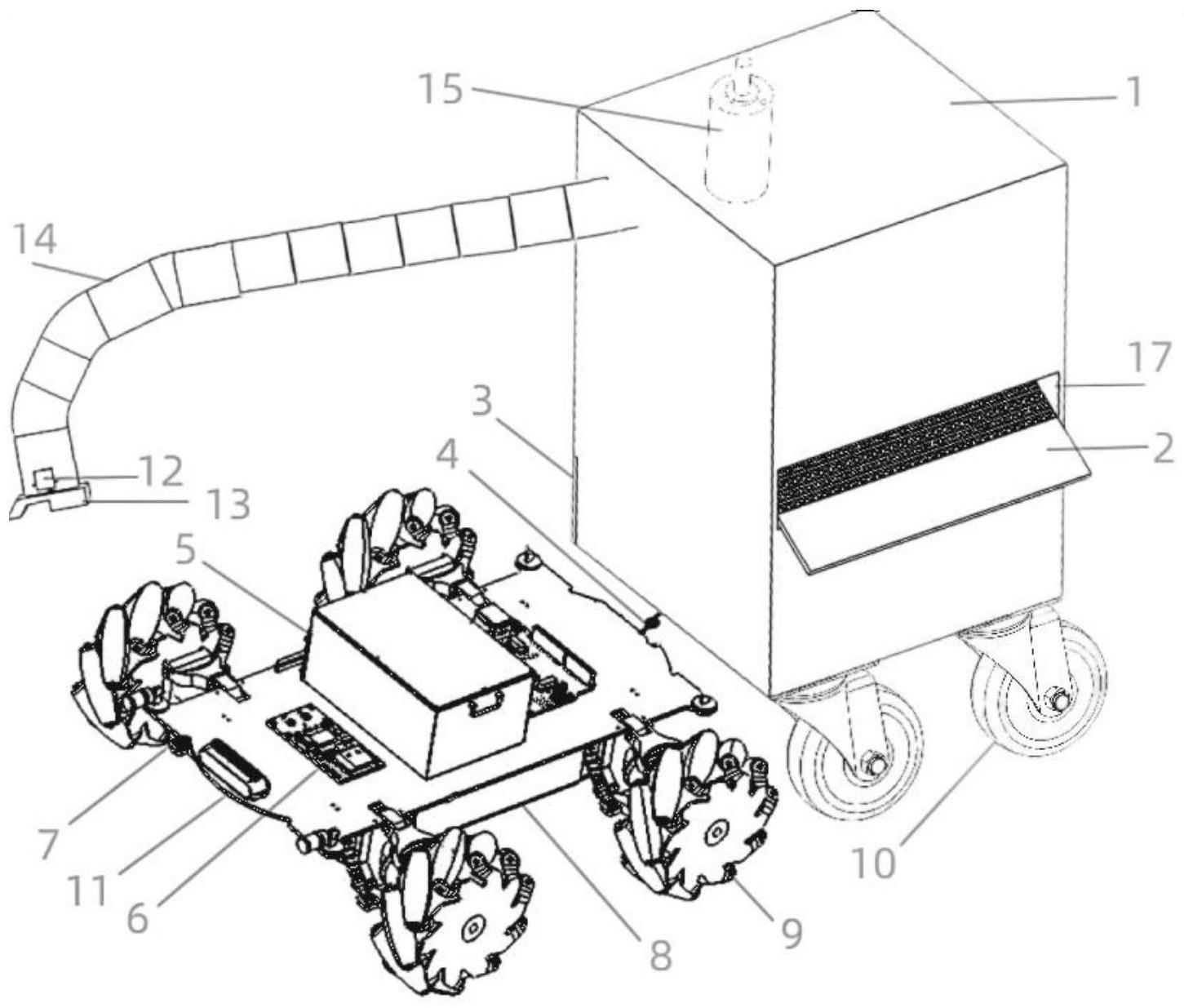
6、一种气吸式拾取粮食落粒的智能小车,包括车体、行走装置、拾取装置、识别装置、储存装置和控制器;
7、所述行走装置设于车体底部,所述储存装置设于车体一侧,所述拾取装置与储存装置连接,所述控制器设于车体上,控制器分别与拾取装置、储存装置、识别装置和行走装置连接;
8、所述拾取装置包括吸头、通道管和抽气泵,所述抽气泵设于储存装置上,抽气泵与通道管一端连接,吸头与通道管另一端连接;所述吸头上设有舵机,舵机与控制器连接,舵机上设有行走轮;
9、所述识别装置包括视觉传感器,视觉传感器设于车体侧面和吸头顶部,与控制器连接,用于获取前方图像并传递给控制器;
10、所述控制器根据车体侧面的视觉传感器传递的前方图像信息识别粮食落粒,控制行走装置进行导航移动,移动到粮食落粒处后,控制器根据吸头顶部的视觉传感器识别粮食落粒,控制吸头上的舵机,使得吸头移动,拾取范围内所有粮食落粒。
11、上述方案中,所述车体包括电机架和底盘;所述底盘上设有电源,底盘底部设有电机架。
12、进一步的,所述行走装置包括麦克纳姆轮和驱动电机;
13、所述驱动电机设于电机架上,所述麦克纳姆轮与驱动电机连接;所述驱动电机与控制器连接。
14、上述方案中,所述车体通过詹氏车钩与储存装置连接。
15、上述方案中,所述储存装置包括集粮箱和脚轮;
16、所述集粮箱顶部侧面设有通孔,通孔与通道管连接;
17、所述集粮箱内部设有凹槽,侧面设有垃圾口,凹槽处设有倾斜的滤网,滤网底部与垃圾口连接;所述滤网与舵机连接;
18、所述集粮箱底部设有斜面,集粮箱在斜面低处的一侧设有开口;开口顶部设有合页,箱门通过合页与开口顶部连接,箱门底部设有锁扣,通过锁扣与集粮箱底部连接;
19、所述脚轮设于集粮箱底部。
20、进一步的,所述滤网为阶梯式滤网,网孔直径大于应拾取粮食落粒直径。
21、进一步的,所述集粮箱在相对于垃圾口的一侧设有吹气装置,用于将拾取装置吸取的灰尘从垃圾口吹出。
22、上述方案中,所述识别装置还包括超声波传感器;
23、所述超声波传感器设于车体侧面,与控制器连接,用于检测周围障碍物并传递给控制器;导航移动时控制器根据超声波传感器传递的障碍物信息进行避障。
24、进一步的,所述识别装置还包括测高仪,测高仪设于滤网下方,用于检测集粮箱内粮食高度。
25、一种气吸式拾取粮食落粒的智能小车的拾取方法,包括以下步骤:
26、步骤s1、信息收集:车体侧面的识别装置识别周围图像信息,将信息发送到控制器;
27、步骤s2、路径规划:控制器根据从识别装置收集的图像信息识别粮食落粒,并规划小车到粮食落粒的行走路径;
28、步骤s3、导航移动:控制器控制行走装置根据步骤s2所述的行走路径移动到粮食落粒处,在移动途中,识别装置识别路径上障碍物信息进行避障;
29、步骤s4、粮食拾取:吸头上的识别装置识别周围图像信息,将信息发送到控制器,控制器根据图像信息判断吸头拾取范围内所有粮食落粒,控制吸头上的舵机和行走轮,移动吸头,吸取吸头拾取范围内所有粮食落粒;
30、步骤s5、收集判断:识别装置识别储存装置内已收集粮食高度并传递给控制器,若未到达一定阈值,重复步骤s1至s4;若达到一定阈值,控制器控制行走装置回到预设卸粮地点。
31、与现有技术相比,本发明的有益效果是:
32、根据本发明的一个方式,采用先移动小车再移动吸头的方式,小车到达粮食落粒位置后,控制吸头在吸头拾取范围内有粮食落粒处移动,吸取拾取范围内所有粮食落粒,仅需移动一次小车,即可拾取大范围内所有粮食落粒,不需要智能小车逐次移动,大大提高了工作效率,节省了工作时间。
33、根据本发明的一个方式,车体和储存装置采用詹式车钩连接,能够确保两车体之间的牢固连接,同时不易出现颠簸和振动,提高了车辆运行的灵活性
34、根据本发明的一个方式,行走装置采用麦克纳姆轮组,具有多向移动性,使得小车可以自由移动,并具有更好的操作性和精;麦轮具有良好的承载能力,能够承受相当大的负载,并在不同的环境下具有更强大的适应能力。
35、根据本发明的一个方式,滤网采用阶梯状的结构,使得滤网表面积相对平面滤网更大,减小了颗粒堆积的可能性,从而提高防堵能力,增加了过滤效率。
36、注意,这些效果的记载不妨碍其他效果的存在。本发明的一个方式并不一定必须具有所有上述效果。可以从说明书、附图、权利要求书等的记载显而易见地看出并抽出上述以外的效果。
- 还没有人留言评论。精彩留言会获得点赞!