一种零部件主动分类上料的储存设备的制作方法
本发明涉及机器人零部件运输,具体为一种零部件主动分类上料的储存设备。
背景技术:
1、服务机器人包括一切模拟人类行为或思想与模拟其他生物的机械,能自动执行任务的人造机器装置,用以取代或协助人类工作,且服务机器人由多个零部件整合而成,在组拼过程中需要进行大批次机器人零部件的运输上料以及暂储,供后续机器人的加工,由于现有服务机器人在安装过程中需要使用大小不同的零配件过多,导致体型差距不大的零配件手动细分较为繁琐,浪费大量的工作时间,且分类储存过程中容易出现错放的情况,影响了后续进行装配时的上料效率,给实际使用带来了一定的不利影响,因此需要进行改进。
技术实现思路
1、本发明的目的在于提供一种零部件主动分类上料的储存设备,具备通过可调节的夹板以及距离传感器对不同长度机器人零部件进行测距,可换向的收纳框通过重力传感器能够进行机器人零部件的重量承量,以便智能得出相符合的机器人零部件,后续通过不同位置的上料框进行储存,可实现对机器人零部件高效分类上料效果的优点,给实际使用带来了一定的有利影响,解决了以上背景技术中提出的问题。
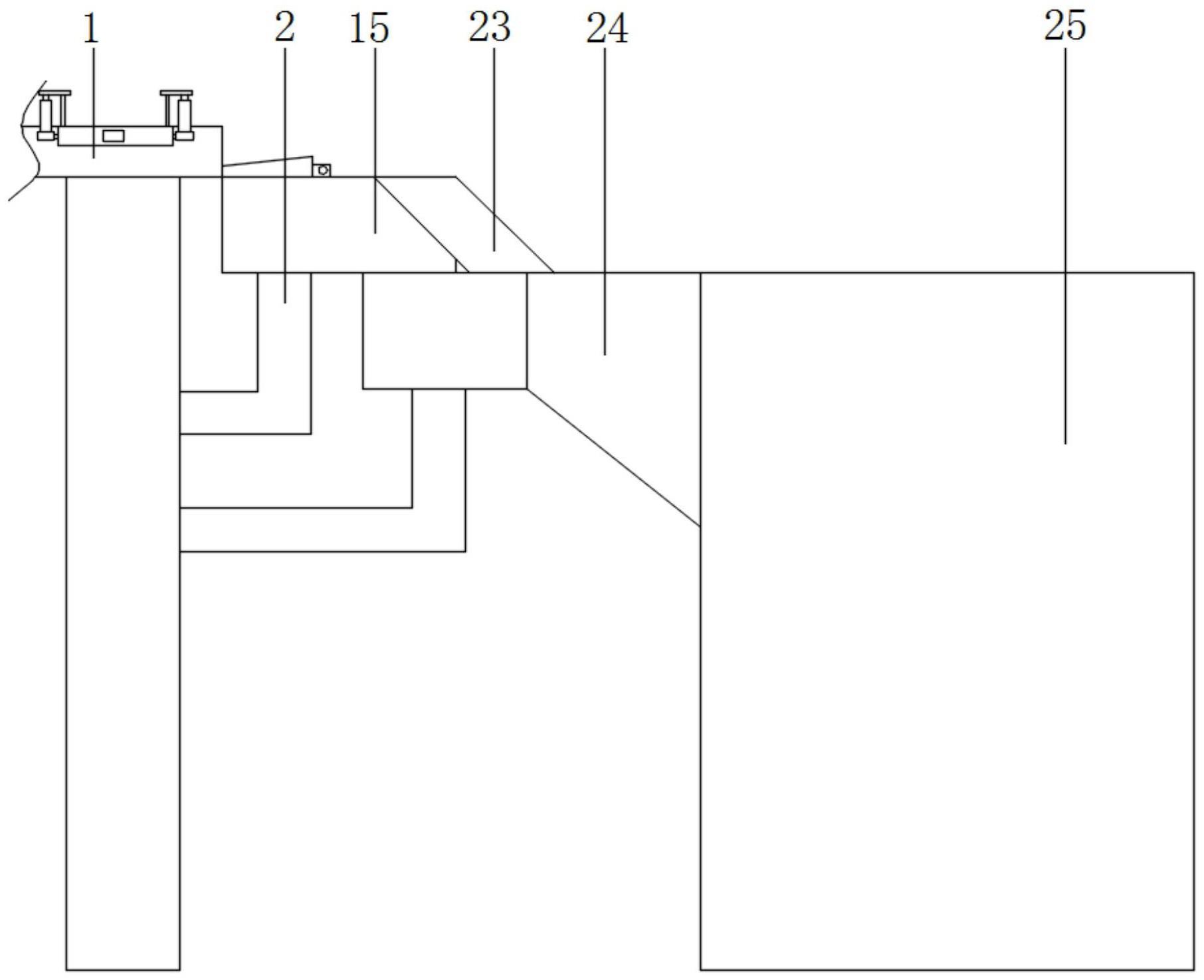
2、为实现上述目的,本发明提供如下技术方案:一种零部件主动分类上料的储存设备,包括运输台,所述运输台的底部固定连接有支柱,所述运输台的前侧固定安装有调节框,所述调节框的前侧固定连接有固定框,所述固定框的内壁固定安装有驱动电机一,所述驱动电机一的输出端连接有换向组件,所述调节框内壁的表面通过支架中轴承转动连接有螺纹杆,所述螺纹杆的表面螺纹连接有螺纹套板,两个螺纹杆上的螺纹方向呈相反方向,所述调节框的表面开设有供螺纹套板移动的通槽,所述螺纹套板的表面连接有限位组件,所述螺纹套板的一端固定连接有移动板,所述移动板的顶部固定安装有电动气缸一,所述电动气缸一的输出端固定连接有侧板,所述侧板的表面固定连接有夹板,位于右侧的侧板固定安装有距离传感器,位于左侧的侧板固定安装有光接收板,所述运输台内壁的前侧和后侧均固定安装有接近传感器,所述支柱的顶部固定连接带有智能模块的圆台,所述圆台的内壁转动连接带有内齿轮的圆环,所述圆台内壁的顶部固定安装带有驱动端的主齿轮,所述主齿轮的表面和圆环上内齿轮的表面啮合连接,所述圆环的表面固定连接有稳定架,所述稳定架的顶部通过支架固定安装有驱动电机二,所述驱动电机二的输出端固定连接有转动杆,所述转动杆的表面固定连接有收纳框,所述收纳框的内部固定安装有重力传感器,所述圆台的侧面固定连接有倾斜导向框,所述倾斜导向框的下方放置有转向框,所述转向框的右侧固定连接带有plc控制器的储存框,所述储存框内壁的底部固定安装有电动气缸二,所述电动气缸二的输出端固定安装有上料框。
3、优选的,所述换向组件包括主动锥形齿轮和从动锥形齿轮,所述主动锥形齿轮固定连接在驱动电机一的输出端上,所述从动锥形齿轮固定连接在螺纹杆的一端上,所述从动锥形齿轮的表面和主动锥形齿轮的表面啮合连接。
4、优选的,所述限位组件包括限位板和限位槽,所述限位板固定连接在通槽的内壁上,所述限位槽开设在螺纹套板的侧面上,所述限位槽的内壁和限位板的表面滑动连接。
5、优选的,所述夹板的表面固定连接有耐磨垫,所述耐磨垫的表面开设有防滑纹。
6、优选的,所述收纳框的底部固定连接有弹性垫,所述圆台的顶部开设有放置槽,所述放置槽的内壁和弹性垫的表面抵接。
7、优选的,所述倾斜导向框的数量为三个,且数量为三个的倾斜导向框均匀分布在圆台的右侧上。
8、优选的,所述转向框内壁的底部固定安装有气弹簧,所述气弹簧的一端固定连接有减震垫,所述转向框内壁的前侧和后侧均固定连接有橡胶垫,所述转向框内壁的下表面固定连接有光滑板。
9、优选的,所述储存框内壁的下表面固定连接有定位杆,所述上料框的底部固定连接有定位槽,所述定位槽的内壁和定位杆的表面卡接且适配。
10、与现有技术相比,本发明的有益效果是:
11、1.当机器人零部件移动到接近传感器后,通过提前在plc控制器中设置的数据规划,在换向组件的换向效果下,驱动电机一运作能够带动螺纹杆进行转动,后在限位组件的作用下,使得螺纹杆转动能够带动螺纹套板移动,螺纹套板移动能够带动移动板移动,以及夹板的左右位置移动,且两个螺纹杆上的螺纹方向呈相反方向,即可实现两个螺纹套板的相对方向移动,进而带动两个夹板的相互靠近或者远离,调节夹紧范围,同时电动气缸一运作能够带动侧板以及夹板下移,进而夹紧到来的机器人零部件,在耐磨垫的作用下,减少了对机器人零部件的防滑情况以及延长侧板的实用时间,根据距离传感器以及光接收板的感应作用,可利用“飞行时间法”的原理来实现测距离,以检测物体的距离,得出机器人零部件的长度;
12、2.通过重力传感器可进行其上机器人零部件的感应称重,以得出机器人零部件的长度以及重量,可根据圆台中智能模块内部储存的信息对比,得出需要储存的方向,然后主齿轮在其上驱动端控制下进行转动,主齿轮转动能够带动内齿轮进行转动,进而带动稳定架进行转动,完成对收纳框以及内部机器人零部件的换向,智能判断到合适位置的倾斜导向框处后,驱动电机二启动能够带动转动杆进行转动,转动杆转动能够带动收纳框进行向下摆动,弹性垫放置于放置槽中进行稳定,使得收纳框能够倾斜排出机器人零部件进入倾斜导向框中;
13、3.在减震垫和气弹簧的卸力下,可减小机器人零部件下移造成的冲击力,后经过光滑板进入上料框的内部,且三个倾斜导向框可分别进行机器人零部件的三种大小不同型号的排向,或者进行不同重量的机器人零部件排送,若需要更多不同机器人零部件的分类,可临时添加更改数据,添加倾斜导向框进行增加储存处,后续需要进行上料使用时,电动气缸二启动能够带动上料框移出储存框,以便工作人员拿取使用。
技术特征:
1.一种零部件主动分类上料的储存设备,包括运输台(1),所述运输台(1)的底部固定连接有支柱(2),其特征在于:所述运输台(1)的前侧固定安装有调节框(3),所述调节框(3)的前侧固定连接有固定框(4),所述固定框(4)的内壁固定安装有驱动电机一(5),所述驱动电机一(5)的输出端连接有换向组件,所述调节框(3)内壁的表面通过支架中轴承转动连接有螺纹杆(6),所述螺纹杆(6)的表面螺纹连接有螺纹套板(7),两个螺纹杆(6)上的螺纹方向呈相反方向,所述调节框(3)的表面开设有供螺纹套板(7)移动的通槽,所述螺纹套板(7)的表面连接有限位组件,所述螺纹套板(7)的一端固定连接有移动板(8),所述移动板(8)的顶部固定安装有电动气缸一(9),所述电动气缸一(9)的输出端固定连接有侧板(10),所述侧板(10)的表面固定连接有夹板(11),位于右侧的侧板(10)固定安装有距离传感器(12),位于左侧的侧板(10)固定安装有光接收板(13),所述运输台(1)内壁的前侧和后侧均固定安装有接近传感器(14),所述支柱(2)的顶部固定连接带有智能模块的圆台(15),所述圆台(15)的内壁转动连接带有内齿轮的圆环(16),所述圆台(15)内壁的顶部固定安装带有驱动端的主齿轮(17),所述主齿轮(17)的表面和圆环(16)上内齿轮的表面啮合连接,所述圆环(16)的表面固定连接有稳定架(18),所述稳定架(18)的顶部通过支架固定安装有驱动电机二(19),所述驱动电机二(19)的输出端固定连接有转动杆(20),所述转动杆(20)的表面固定连接有收纳框(21),所述收纳框(21)的内部固定安装有重力传感器(22),所述圆台(15)的侧面固定连接有倾斜导向框(23),所述倾斜导向框(23)的下方放置有转向框(24),所述转向框(24)的右侧固定连接带有plc控制器的储存框(25),所述储存框(25)内壁的底部固定安装有电动气缸二(26),所述电动气缸二(26)的输出端固定安装有上料框(27)。
2.根据权利要求1所述的一种零部件主动分类上料的储存设备,其特征在于:所述换向组件包括主动锥形齿轮(28)和从动锥形齿轮(29),所述主动锥形齿轮(28)固定连接在驱动电机一(5)的输出端上,所述从动锥形齿轮(29)固定连接在螺纹杆(6)的一端上,所述从动锥形齿轮(29)的表面和主动锥形齿轮(28)的表面啮合连接。
3.根据权利要求1所述的一种零部件主动分类上料的储存设备,其特征在于:所述限位组件包括限位板(30)和限位槽(31),所述限位板(30)固定连接在通槽的内壁上,所述限位槽(31)开设在螺纹套板(7)的侧面上,所述限位槽(31)的内壁和限位板(30)的表面滑动连接。
4.根据权利要求1所述的一种零部件主动分类上料的储存设备,其特征在于:所述夹板(11)的表面固定连接有耐磨垫(32),所述耐磨垫(32)的表面开设有防滑纹。
5.根据权利要求1所述的一种零部件主动分类上料的储存设备,其特征在于:所述收纳框(21)的底部固定连接有弹性垫(33),所述圆台(15)的顶部开设有放置槽(34),所述放置槽(34)的内壁和弹性垫(33)的表面抵接。
6.根据权利要求1所述的一种零部件主动分类上料的储存设备,其特征在于:所述倾斜导向框(23)的数量为三个,且数量为三个的倾斜导向框(23)均匀分布在圆台(15)的右侧上。
7.根据权利要求1所述的一种零部件主动分类上料的储存设备,其特征在于:所述转向框(24)内壁的底部固定安装有气弹簧(35),所述气弹簧(35)的一端固定连接有减震垫(36),所述转向框(24)内壁的前侧和后侧均固定连接有橡胶垫(37),所述转向框(24)内壁的下表面固定连接有光滑板(38)。
8.根据权利要求1所述的一种零部件主动分类上料的储存设备,其特征在于:所述储存框(25)内壁的下表面固定连接有定位杆(39),所述上料框(27)的底部固定连接有定位槽(40),所述定位槽(40)的内壁和定位杆(39)的表面卡接且适配。
技术总结
本发明公开了一种零部件主动分类上料的储存设备,包括运输台,所述运输台的底部固定连接有支柱,所述运输台的前侧固定安装有调节框,所述调节框的前侧固定连接有固定框,所述固定框的内壁固定安装有驱动电机一,所述驱动电机一的输出端连接有换向组件,所述调节框内壁的表面通过支架中轴承转动连接有螺纹杆,所述螺纹杆的表面螺纹连接有螺纹套板。本发明通过上述等结构的配合,实现了通过可调节的夹板以及距离传感器对不同长度机器人零部件进行测距,可换向的收纳框通过重力传感器能够进行机器人零部件的重量承量,以便智能得出相符合的机器人零部件,后续通过不同位置的上料框进行储存,可实现对机器人零部件的高效分类上料效果。
技术研发人员:宋育刚,宋秀楠
受保护的技术使用者:苏州穿山甲机器人股份有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!